摘要: 随着社会的发展,独居老人和女性越来越多,在很多情况下这类人群搬运东西很不方便,因此急需要一套设备协助这类人群进行一些搬运工作。为此我们针对人体骨骼进行分析这便是外骨骼机器人,设计了一套基于省力理念的外骨骼机器人。目前,国内外的外骨骼机器人价格昂贵,结构比较复杂,对于我国的一些老人和一些女性以及小孩并不适用。因此本文设计的是一款适用于力气较小的普通人及一些单身贵族的外骨骼机器人,此外骨骼机器人结构简单,造价较低。本文对目前国内外的外骨骼机器人设计领域和运用场合及其各种外骨骼机器人优缺点、发展现状进行了全面研究和比较。因此对外骨骼机器人进行了系统的总体结构设计、运动学的分析计算、传动结构的设计与计算,最后完成PLC程序的编写进行自动控制,来实现外骨骼机器人的设计要求。
Abstract:
With the development of society, there are more and more elderly people and women living alone, and in many cases, it is very inconvenient for such people to carry things, so a set of equipment is urgently needed to assist such people in carrying out some carrying work. To this end, we analyze the human bone, which is the exoskeleton robot, and design a set of exoskeleton robot based on the concept of labor-saving. At present, exoskeleton robots at home and abroad are expensive and com-plex in structure, which are not suitable for some elderly people and some women and children in China. Therefore, the design of this article is an exoskeleton robot suitable for ordinary people with less strength and some single nobles; in addition, the skeleton robot has a simple structure and low cost. This paper comprehensively studies and compares the current design fields and application occasions of exoskeleton robots at home and abroad, as well as the advantages, disadvantages and development status of various exoskeleton robots. Therefore, the overall structure design of the system, the analysis and calculation of kinematics, the design and calculation of the transmission structure were carried out for the exoskeleton robot, and finally the PLC program was written for automatic control to achieve the design requirements of the exoskeleton robot.
1. 引言
外骨骼机器人是一种新型的机电设备,它是一种人机结合的可穿戴设备,结合了人类智能和机械能,并且它集成了传感、控制信息和移动计算等多种机器人技术 [1] 。随着科学技术的快速进步和时代的快速发展,越来越多的人对生活质量的要求也越来越高。对如今的人而言,舒适、方便和健康的生活成为人们关注的重点,在日常生活中,搬运一些重物成为了必不可免的日常琐事,而对于一些力气比较小的人这种搬运工作强度是她们接受不了的。而这时穿戴上外骨骼机器人可以解决这一难题,使得她们可以轻松搬运一些重物,降低了劳动强度。除此之外,外骨骼机器人也可用于医疗方面,其独特的符合人体工学的设计使得其可以用于帮助骨骼受伤的患者活动以达到帮助康复的目的。人类身体的承受能力是有极限的,在面临一些负载较重的工作时就需要用其它的机械帮助,有时候会很麻烦,而外骨骼机器人就可以较为方便的解决这个问题,而这也便彰显了外骨骼机器人在成为人机友好合作中不可缺少的作用,也就突出了外骨骼机器人在未来的重要性 [2] 。
2. 外骨骼机器人的整体结构设计
2.1. 外骨骼机器人总体设计方案
根据通过上述问题分析所总结出的人体各关节的运动发展特点及外骨骼机器人的设计基本原则,所设计的外骨骼机器人产业结构模型如图1所示。外骨骼结构设计机器人外骨骼分为上,背部,驱动轮结构的束缚,和下肢外骨骼 [3] 。
图1为全身外骨骼机器人结构图,各部分为:1、手臂传动轮,2、绑缚结构,3、外骨骼下肢,4、外骨骼上肢,5、绑缚结构,6、背部,7、腿部传动轮。
在骨骼四肢和背部等方面外骨骼机器人的确定过程中,数据的大小主要是指表,因为需要考虑大小不同穿着者的身体,外骨骼机器人可以应用于大多数人,使用可调节的方式因此肢外骨骼电力传送机械手。其尺寸进行选择的范围管理标准为符合中国社会上大多数人的身体结构尺寸,此范围覆盖了我国国内企业绝大多数成年男性的尺寸,也符合外骨骼助力搬运机器人通用性的设计基本原则。下面外骨骼动力操控机器人结构的每一部分。
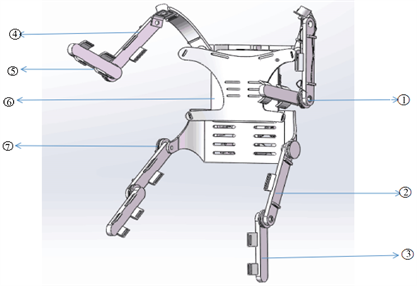
Figure 1. Full body exoskeleton robot structure
图1. 全身外骨骼机器人结构
2.1.1. 外骨骼机器人上肢结构设计
外骨骼通过机器人的上肢功能结构分析如图2所示,所设计的外骨骼上肢主要由控制外骨骼系统关节,外骨骼四肢、绑缚结构及驱动轮可以组成。其中,所述肩部的外骨骼设计具有两个自由度,即在冠状面矢状屈曲伸展,在矢状面上有一个自由度的外骨在人体搬运技术的发展过程中,人体旋转方向的运动不影响人体正中平面的运动,因此所设计的外骨骼肩关节具有两种经济性 [4] 。人类肘自由的只有一个程度,这样设计的肘外骨骼也有矢状面伸展自由度。根据分析,外骨骼上臂尺寸范围为290 mm~355 mm,外骨骼下臂尺寸范围为220 mm~260 mm [5] 。

Figure 2. Upper limb structure diagram of exoskeleton robot
图2. 外骨骼机器人上肢结构图
2.1.2. 外骨骼机器人下肢结构设计
所设计的外骨骼通过机器人的下肢功能如图3所示,外骨骼研究下肢主要由控制外骨骼大腿、外骨骼小腿、腿部传动轮、绑缚结构和外骨骼部分膝关节所组成。外骨骼大腿和传动轮的一端与外骨骼腰部的旋转连接。外骨骼腰部的重量通过支撑结构连接外骨骼大腿和外骨骼腰部可以转移到外骨骼大腿。大腿骨和由支承膝关节驱动连接在一起的外骨骼的另一侧。中间一个部分企业可通过绑缚结构与人体相连。小腿部分被设计成与主体结构连接的两个腿捆绑,使得更多的力。根据前面所作分析,外骨骼助力搬运机器人的尺寸需要覆盖10%~99%的尺寸范围,所以根据分析外骨骼大腿的尺寸范围为440 mm~530 mm,外骨骼小腿的尺寸范围为360 mm~420 mm。
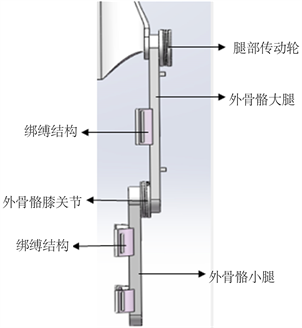
Figure 3. Structure diagram of lower limb of exoskeleton robot
图3. 外骨骼机器人下肢结构图
3. 传动过程
外面的左臂和右臂对称结构这项研究部分的机器人四肢骨骼的身体,在功能上的工作同时大部分时间,所以有必要在运动学模型简化的考虑一些问题,高效的建模。以右臂为例,可以自己认为是由背部、肩关节、上臂连杆、肘关节活动以及下臂所组成的连杆机构,人体的上臂及下臂则需要我们通过绑缚绷带与外骨骼机器人的上下臂连杆捆绑结合在一起,外骨骼机器人的上肢杆件将带动穿戴者的上肢功运动 [6] 。
外骨骼机器人上肢运动学计算
如表1所示,其中L1和L2是在杠杆臂的外骨骼机器人臂和杆构件的长度,和L3表示肩关节的旋转到固定距离从背面的中心,它是由台肩的L4部分旋转中心到表示承担设定的距离。则相邻关系两个选择连杆的相对位姿可以写为以下的表达方式:
(3-1)

Table 1. Table of D-H parameters of the unilateral upper limb part of the exoskeleton robot
表1. 外骨骼机器人单侧上肢部分D-H参数表
然后用获得的关于全局坐标系,由此计算所述机器人之间的变换的端部的空间位置和方位邻接的杠杆型矩阵的信息乘以既定去上肢骨骼四杆的出联动,即机器人外骨骼上肢部分正矩阵方程的运动学解,如下所示:
(3-2)
联合上述两组矩阵方程可以计算出:
(3-3)
为了验证
的正确性,将上肢初始关节角度代入所求的关系式中,初始角度为
代入到关系式中有:
将初始位置代入式3-2中得:
(3-4)
求得末端执行器位置为X = 0,Y = L1 + L2,Z = 0与图4所示位置关系相符,对上述运动学进行验证。

Figure 4. Exoskeleton upper limb link coordinate system
图4. 外骨骼上肢连杆坐标系
4. 外骨骼机器人工作原理
为了使外骨骼机器人能够在很短的时间内读取佩戴者发出的信号要求,本装置引入PLC自动控制模块,利用软件程序控制外骨骼机器人和外骨骼机器人自锁装置的电机启停,使各个环节有序进行。加入plc的控制使外骨骼机器人更好地降低了运动的错误率,使用PLC的控制使外骨骼机器人更好地完成相应的工作。
PLC的设计
模块化设计促进一致的低性能定制产品和解决方案,以创建可扩展性。西门子的S7200微PLC可视为独立的微PLC。解决方案或与其他系统控制器相结合的学生使用,而PLC具有中国强大的性能,优化的模块化和开放式通信,结构紧凑,小空间信息处理没有任何技术应用的理想的人选择自己的CPU模型在基本和先进的管理功能,大容量的程序和数据存储,在任何时候,实时响应都可以有效的控制整个开发过程,从而进一步提高工作的质量、效率和安全性。其次,现在是突破的时候了全程严格控制时间等。
5. 结论
本课题为一种可穿戴的外骨骼机器人的结构设计,本设计是在分析了国内外外骨骼机器人研究的基础上,设计了一种适用于一些单身贵族以及一些力气比较小的普通人的外骨骼机器人。在本课题设计之初,查询对比过其他外骨骼机器人发现目前市场上现有外骨骼机器人价格昂贵,结构复杂并不适合大众消费。于是本课题设计了一种结构相对简单、造价相对低并且适用于大众消费的,在课题装置的总体设计中,主要从四个方面进行设计。分别是上肢结构的设计、下肢结构的设计、绑缚结构的设计以及模块化的结构设计。然后就是传动机构的设计及计算和运动学的分析,最后是PLC程序控制设计,本文主要从以下几个点进行阐述:
1) 建立外骨骼机器人的结构模型,通过对人体运动进行分析对上下肢结构进行了设计,其中绑缚设计是人机耦合的关键设计,然后就是利用模块化的设计使其结构变得简单。
2) 接着就是对外骨骼机器人的传动机构进行设计与计算,在对传动机构的设计中,本课题选用的是钢丝绳加上传动轮的传动设计,此设计不仅结构简单而且成本较低,传动效率也高。
3) 最后就是对外骨骼机器人的自动程序的设计,本课题主要采用PLC进行控制。
基金项目
高层次人才启动项目(XJGC20190927);贵州省科技计划项目(黔科合基础[2019]1152号);国家级大学生创新创业训练计划项目(项目名称为可控式骨骼机器人,项目编号为202114440028)。