1. 引言
无人机是近些年来国内外研究的热点,以其自身独特的优势在搜救、侦查、地形地貌勘察、抗洪抢险以及军事等领域得到了广泛的应用。小型无人机并不是简单的同比例缩小大飞机得来的,它涉及到空气动力学、能源材料、程序控制、系统仿真、工程设计等领域。Fitzgerald和Muller [1] 研究了该机翼形状上的层流分离泡。Khan和Muller [2] 通过实验研究了FX63-137机翼前缘涡对下游同形机翼形状影响。Eppler [3] 和Drela [4] 研究了常用的两种低雷诺数机翼形状设计方法,其中Drela方法编写成了应用广泛的XFOIL源程序。北京航空航天大学的雷旭升、王挺 [5] 等从飞行控制角度针对小型无人飞行器抗风扰动问题,通过神经网络改进卡尔曼滤波算法,提高飞行器对环境的适应性。中国航天空气动力技术研究院的刘斌、刘沛清 [6] 从气动布局角度探索验证了小型飞行器的气动布局与抗突风载荷能力的关系。
本文在上述研究基础上,针对小型无人机机翼形状布局设计开展优化研究,利用流场仿真手段获取机翼形状设计参数与无人机性能等参数,作为后续分析的基础。在给定大攻角状态和巡航状态下,运用Pareto遗传算法和映射关系库,以升阻比和升力系数为目标函数,采取多目标寻优的方法得到最优的机翼形状设计数据,并将设计数据代入到流场模型中去,得到无人机的机翼形状流场压力参数分布规律。
2. 流场仿真理论基础
2.1. 控制方程
利用流场仿真手段获得无人机机翼形状流场主要参数的分布规律。控制方程采用纳斯—斯托克斯(Navier-Stokes)方程描述 [7] 。对于不可压均质流体,流体的密度为常数,则可简化为:
(1)
对于动量方程,可得到非守恒形式的不可压流常粘性系数动量方程组为:
(2)
其中,
为流场密度,
是分子粘性系数。
2.2. 湍流模型
为了使雷诺平均N-S方程封闭,在涡粘模型假设的基础下,引入了湍流模型。Spalart-Allmaras模型如下:
(3)
其中,
,
,
,
,
,
,
,
,
,
。d表示网格点到壁面的距离,
表示旋度矢量。
3. 神经网络基础
在获得的无人机机翼形状设计数据与气动性能数据基础上,利用BP神经网络方法建立机翼形状数据与性能数据的映射关系库。BP网络是利用误差反向传播算法的多层前向神经网络模型,典型的三层前馈型BP网络的拓扑结构如图1所示 [8] 。

Figure 1. Three layer feed forward network
图1. 三层前馈型BP网络
BP网络可看成是从输入到输出的高度非线性映射,即
(4)
其中,f为S型函数:
(5)
采用最大误差验算模型映射关系库的精度,见式(6)。
(6)
式中,
是BP神经网络预测值,
是CFD计算值。
4. 优化算法
4.1. 遗传算法的基本原理
用遗传算法解决机翼形状优化问题时,首先要对气动优化问题的模型结构和气动参数进行编码,通常用字符串表示,可按如下步骤进行。
1) 对解决的问题进行编码;
2) 利用随机的方法产生初始种群
;
3) 对当前群体
中每个个体
计算其适应度
,适应度与目标函数密切相关,本文的适应度函数为大迎角状态的升力系数和巡航状态的升阻比;
4) 应用选择算子生成中间种群
;
5) 为了延伸有限个体的覆盖面,对
应用变异和交叉算法,产生新一代群体;
6) 令
,若不满足终止条件,则继续步骤(3)。
4.2. Pareto多目标遗传算法
飞行器外形气动优化设计通常需要考虑不同飞行状态下满足多种设计目标和参数约束范围,对于这样的多点气动设计问题,需要合适的多目标优化算法。Pareto解定义为:在可行解U和可行解V均在实数空间中,如果不存在可行解U能够满足以下条件:
1) 对于任意一个子目标i,使得
;
2) 并且存在一个子目标i,使得
,
;
则V为非劣解或Pareto解。如果实数空间中存在可行解U使上述条件满足,则称解U支配解V。

Figure 2. Pareto frontier and feasible zone
图2. Pareto前沿及可行域
Pareto最优解的特性决定了其解集一般分布在所有可行域的边缘,也叫Pareto前沿(如图2所示)。利用遗传算法可以在一次仿真运行中获得一组Pareto解的集合,收敛到Pareto前沿且具有良好的分布,能够保持解的多样性。
5. 无人机机翼形状优化流程
小型无人机三维几何模型的构成比较简单,主要包括机身、机翼、尾翼等部分,如图3所示。基本翼为中等展弦比中等后掠的切尖三角翼,边条翼为大后掠的细长形三角翼。对设计的小型无人机进行三维几何造型。主要几何外形数据见表1。

Table 1. The main geometric parameter
表1. 主要几何外形参数
本文设计的机翼形状优化思路如下图4:
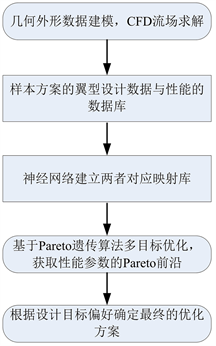
Figure 4. The flow of wings platform configuration optimization design
图4. 机翼平面形状优化设计流程
首先,基于无人机几何外形数据建模,确定对无人机性能影响较大的外形参数为边条后掠角
,边条展向位置比R,基本翼前缘后掠角
,基本翼展弦比k,CFD流场仿真计算得到对应的气动性能参数(升力系数CL和升阻比CL/CD)。根据最优拉丁超立方设计思想 [9] ,通过改动机翼形状设计数据,增加样本点。利用神经网络的方法建立机翼形状设计数据与气动性能参数的映射库,模型输入参数为
、R、
、k,输出参数为CL和CL/CD。基于Pareto遗传算法进行多点多目标优化,得到最优解的Pareto前沿,最后根据设计目标偏好确定最优优化方案。
6. 仿真与计算
6.1. 无人机模型建立与计算
首先将无人机整体数据导入模型中,建立无人机模型,采用非结构网格划分计算域。由于模型的对称型,只计算模型的一半。计算域为半个圆柱形计算域,沿机翼弦长方向尺寸为机翼特征弦长的10倍,展向尺寸为机翼半展长的5倍。计算稳定后,得到对应的气动性能参数。采用前述的N-S控制方程和S-A湍流模型。为保证模型参数比较的一致性,所有流场计算参数采用一套网格划分区域和流场计算方法等。图5显示了机体表面网格的划分情况。最终划分的整个无人机表面和流场网格共计22万面网格,80万体网格,如图6所示。
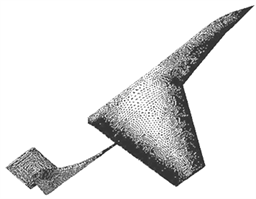
Figure 5. Surface mesh of half model
图5. 半模机体表面网格示意图
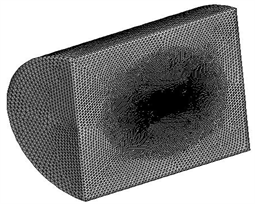
Figure 6. Body mesh of computational domain
图6. 计算域整体网格图
采用CFD方法获取300个样本点,其中200个点用于神经网络模型,剩余100个点用于验证模型精度(采用式(6)作为标准)。结果见表2。
由表2可知,BP神经网络模型满足精度要求,可以用来建立无人机机翼形状设计数据与气动性能的映射库。
6.2. 多点多目标优化模型
要求设计的无人机满足在大迎角飞行时机翼具有较大的升力系数,以提高失速特性;在巡航设计点下具有较好的升阻特性,以提高气动效率。需要对机翼平面形状进行多目标优化设计,从而能保证多个状态的性能都能得到较好的兼顾。上述要求转化成目标函数和约束函数,表示成式(7)。
设计状态:
状态1:
,
;
状态2:
,
。
目标函数:
目标函数1:
;
目标函数2:
。 (7)
约束函数:
状态1:
;
状态2:
。
基于Pareto遗传算法求解上述目标函数。其中,目标函数为最大化大迎角状态下的升力系数和巡航状态下的升阻比,该边条翼布局的4个平面形状参数为优化参数,进行多目标优化设计。初始种群大小为300,交叉概率为0.7,变异概率为0.1,最大种群进化代数为50代。要达到最终的优化目的,需要在两个目标之间进行协调权衡,使两个目标均尽可能达到最优。经过在Pareto前沿上折衷选择后,得到了优化方案,如图7。表3和表4给出了优化前后机翼平面形状参数和机翼气动性能的改变。

Figure 7. The selected Pareto optimal on Pareto frontier
图7. 在Pareto前沿上所选的优化解
Table 3. Comparison of platform parameters between initial and optimized wings
表3. 原始及优化机翼平面参数
Table 4. Comparison of aerodynamic performance between initial and optimized wings
表4. 原始及优化机翼气动性能比较
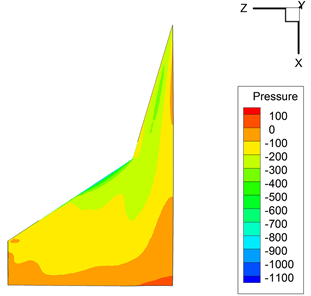
从表3和表4优化前后的机翼形状看出,基本翼展弦比增大,边条后掠角减小,基本翼前缘后掠角增大,边条展向位置比增大,机翼形状发生变化。由于平面形状的改变,机翼气动性能相应发生了变化:小迎角状态下升阻比提高了5.6%,大迎角状态下升力系数提高了5.5%。图8给出了在大迎角状态下优化前后机翼上表面压力云图,可以看出优化后机翼平面形状的改变导致机翼上表面低压区域面积增大,从而提高了机翼的气动特性。
 (a) 初始机翼 (b) 优化机翼
(a) 初始机翼 (b) 优化机翼
Figure 8. Comparison between initial and optimized wings under high attack angle
图8. 大攻角状态下的优化前后机翼对比
7. 总结
本文通过优化机翼形状,设计出一套无人机气动性能改进的方法。应用该方法修正飞机机翼形状,较好的提升了无人机气动性能。得到的主要结论如下:
1) 确定了影响无人机气动性能关键的机翼平面形状参数,建立了飞机机翼形状与气动性能映射关系库,利用CFD方法完善了参数数据库,并且CFD和神经网络预测最大误差为0.0935,满足精度要求。
2) 基于Pareto遗传算法,利用多点多目标寻优的方法,计算了兼顾大迎角状态和巡航状态最佳的气动性能,经过优化得到,最佳的机翼形状参数和气动性能,升力系数提高5.5%,升阻比提高5.6%。