1. 引言
石油作为世界上极其重要的工业能源,一度被称为“黑色的金子”,“工业的血液”。测井技术作为石油开采中重要的一环,充当着井下仪器的眼睛,它能通过各种探测手段对现有的井孔进行检测,分析井壁的裂缝、孔洞发育程度来综合评价油井的质量。对于判断地下油层气田储层情况、维护油井质量、保障石油产量具有重要意义。
根据不同的工作形式,测井技术可以分成电缆测井和随钻测井。其中电缆测井是指在钻井完成后,先将钻具从井内取出,再将测井设备通过电缆悬吊放入井眼中进行测井的技术。而随钻测井技术是将随钻测井设备安装在靠近钻头的钻铤上,在钻井过程中对地层信息进行实时记录 [1] [2] [3] [4] 。近些年易于开采的近地表油气藏逐渐减少,水平井、大斜度井、深水井等非常规井逐渐增多,且有线技术部署风险太大或成本太高,传统竖直井的电缆测井难以满足实际工程的需求。随钻测井技术中的测井装置被安装在靠近钻头的钻铤上,因此不受钻井类型影响,能够适用于各种非常规井中。又因为随钻测井相较于电缆测井拥有更好的时效性,因此在近些年受到越来越多的关注 [5] 。
随着技术的发展,对于获取的地层信息也提出了新的要求。传统测井技术获取的地层信息曲线,已经难以满足多样化的测井需求。成像测井是将地层信息转换为图像的可视化测井技术。通过获得完整的地层图像,有助于测井分析师对地层倾角、井壁情况、裂缝形态等井下情况做出更准确的判断。因此成像测井在近些年获得了越来越多的关注 [6] [7] 。
本文以石油测井为工程背景,超声波成像测井为研究对象,井下实际采样得到的信号为实验基础,研究相应的超声回波信号去噪、幅度和到时检测的算法,通过研究分析超声成像测井仪器特点以及成像原理,提出了一种随钻超声井壁成像数据采集系统的设计方法。
2. 随钻超声井壁成像实现原理
2.1. 声波测井成像原理
超声波测距原理是指通过超声波发射装置向某一方向发出超声波,在发射时刻开始计时,超声波在传播途中碰到障碍物(反射面)后立刻返回,超声波接收器收到反射波后立刻停止计时,通过发射与接收到超声波的时间差Ts,以及超声波在当前传播介质中的已知速度V,根据声波测距公式,能够计算得到发射装置与被测物体之间的距离d,示意图如下图1所示。
(1)
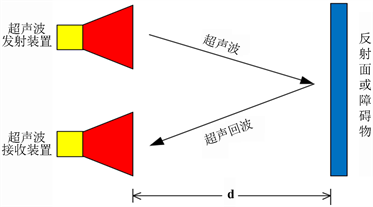
Figure 1. Ultrasonic distance measuring principle
图1. 超声波测距原理
超声换能器探头在旋变系统驱动电机的带动下以恒定的速度周向旋转,每圈均匀分布若干个超声测试点探测井壁信息,同时整个仪器在井上吊车的牵引下沿井眼轴向匀速抬升,形成如图1的螺旋上升扫描路径。
换能器两端的激励信号与反射的回波信号之间的关系如图2所示,其中反射回波信号的首波到时和回波幅度峰值是用于成像的两个关键参数。超声波回波信号首波到时是换能器发射超声波结束时刻到换能器收到超声波回波信号之间的时间差值,与超声波传播介质的声速和声波换能器到井壁之间的距离有关,反映了被测试井段的井径大小信息。而不同深度的井壁对应着不同的岩层分布,在密度和粗糙度上具有一定差异,这种差异对超声波信号来说表现为声阻抗的不同,被测试井段岩层的声阻抗越大超声波回波信号幅值就越大,因此根据提取的回波幅值信息可以反推出井下井壁岩层的地层特征分布状况 [8] [9] 。
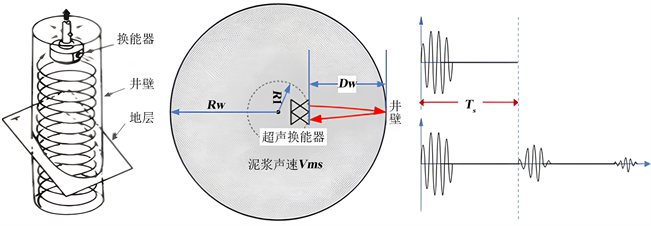
Figure 2. Schematic diagram of well wall imaging implementation
图2. 井壁成像实现原理图
2.2. 首波到时与幅度提取
当测井仪器处于随钻测井的工况下,面临井下温度、泥浆密度、井壁岩性、探头拖尾的长度和幅度、电路系统噪声、电路放大倍数、比较器的灵敏度等多方面因素的影响时,回波信号往往会携带较大的系统噪声。为了提高回波时间检测可靠性,考虑在AD采集到波形数据后,利用算法对回波信号进行滤波处理,进而提取首波到时。
在超声测井仪器中,当回波信号非常微弱时,信噪比很低,在采样信号中很难检测出回波信号;同时基于激励信号与波形信号的相关度较高,所以可以采用激励信号去与采样数据做滑动相关匹配,提高信噪比,从而检测出回波信号。对数字化后的回波信号做匹配时,假设激励信号为单周期双极性脉冲信号,AD转换器对激励信号每个周期采集10个点,就可以用[1, 1, …, 1, −1, −1, …, −1]去与回波信号进行滑动匹配,如图3所示。
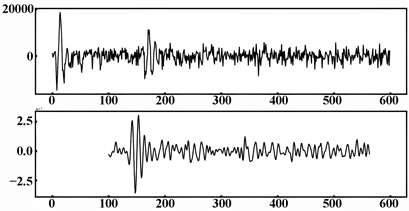
Figure 4. Sliding matches the waveforms of the back and forth echo signals
图4. 滑动匹配前后回波信号波形
由上图4可知,经过滑动匹配后采样信号的信噪比大幅提高。而根据已有的实验结果表明,在探头被激励后,随着时间的推移,拖尾信号峰峰值逐渐衰减,逐渐趋于零电平。因此在就算回波时间时,可以先通过找到回波的最大值点即回波幅度,然后往前推若干周期就是回波到达时间。
3. 系统总体方案设计
随钻超声成像数据采集系统方案设计原理框图如图5所示。首先,FPGA (Field Programmable Gate Array,现场可编程逻辑门阵列)在接收到MWD (Measurement While Drilling,随钻测井仪器)发出的指令后,通过输出通道选择、控制信号来控制发射电路产生驱动信号依次激励4路超声换能器,超声波在接触到井壁后会产生回波信号,回波信号在经过接收电路、回波补偿以及带通滤波处理后,会传输到A/D采集接口。其次,FPGA接收到AD采集的数据后,会进行滤波、提取回波到时、幅值数据,并将提取到的包含时间、方位等信息的数据存入Flash中。
4. 系统硬件设计
4.1. 声波发射与接收模块
为了能够确保达到设计指标,超声发射电路的设计尤为重要。本文采用频率可控的双极性脉冲信号激发声波信号,考虑到电路功耗以及需要四路发射信号分别激发四个换能器的问题,在电路设计上选择双通道四选一芯片74HC4052和集成达林顿管驱动芯片NCV1413B共同组成发射控制电路,发射驱动电路和接收电路由两个三极管、三个电容、一个二极管和若干电阻组成,电路原理图如下图6所示。74HC4052使能端为低电平时,该芯片才工作,所以在电路设计上将直接将该引脚与地线相连接。S1:S0为通道选择控制信号,选中通道后,从Z引脚的输入信号将通过所选择的Y通道输出。NCV1413B是高耐压、大电流复合晶体管阵列,由于FPGA产生的控制信号FP与FC驱动能力较弱,必须通过驱动芯片的增强后来才能对发射驱动电路进行控制,从而产生频率由FP、FC控制的双极性脉冲信号。
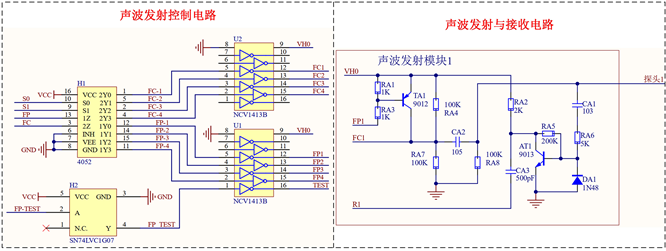
Figure 6. Acoustic transmitter and receiver module
图6. 声波发射与接收模块
4.2. 主控模块
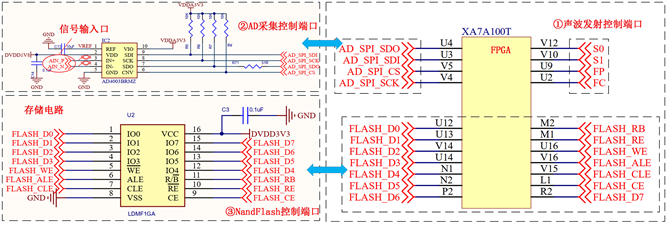
Figure 7. Master control module (partial)
图7. 主控模块(部分)
系统的主控模块部分示意图如图7所示,主控部分FPGA负责激励、采集换能器信号,读取方位传感器信息及控制AD采集换能器回波信号,与MWD通信,存储数据等功能。本次实验选取Xilinx的Artix-7系列的FPGA作为主控芯片,它内部集成了了串行收发器和DSP功能,并具有更大的逻辑容量,适合逻辑复杂的场景。通过对FPGA内部的逻辑资源以及外部接口等参数的评估,主控FPGA我们选用XA7A100T。AD采集芯片选用AD4003,这是一款18位高速低功耗AD芯片,最高速率可达2 MSPS,模拟输入类型为差分型,包括内部2.5 V参考电压或可使用3.3 V外部电压,集成的片上过采样块提高了动态范围,降低了较低带宽的噪声。Nand Flash的存储芯片的种类很多,但具有良好的耐高温性能的芯片却不常见。经过分析比较,选择智腾微电子公司的Nand Flash—LDMF1GA存储芯片作为存储介质。该芯片不仅能在150°C的高温环境下稳定工作,而且其页写入速度仅需800 us,块擦除速度也仅为1.5 ms,极大地提高了数据存储的效率。此外,LDMF1GA芯片体积小(12 mm * 20 mm),存储容量高达1 GB,完全符合系统设计要求。
5. 系统软件设计
对井壁成像的实现来说,除了需要准确提取到回波的首波到时和幅值,也要求系统能在短时间内采集到足够的波形并及时算出波形的到时和幅值,所以系统的工作周期也必须尽可能短。除了通过将相关匹配算法中的乘法简化成加法之外,可以利用类似流水线的方法来提高算法的运算速度。在AD采集到波形数据并在FPGA的FIFO (First Input First Output,先入先出的数据缓存器)模块进行数据缓存后,波形数据以数据流的形式进入相关匹配算法模块。如果将输入的波形数据每寄存一次赋给一个寄存器变量,那么寄存之后的波形便会呈现出如图8所示的形式,若寄存的变量分别为d0,d1,…,d9,相关匹配后的波形为y,最后相关匹配的波形就能直接计算出来了。具体方法为:
(2)
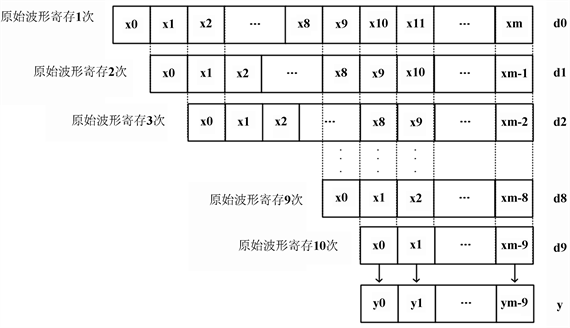
Figure 8. Correlation matching algorithm implementation diagram
图8. 相关匹配算法实现示意图
随钻井壁成像数据采集系统的FPGA实现流程图如图9所示,FPGA起初处于休眠状态,当系统开始上电时,系统会先进行初始化,然后准备接收MWD命令。当判断命令是采集命令时,会根据命令调整实时时钟、工作模式。FPGA在收到对应的采集命令时,会先读取姿态传感器、方位传感器和实时时钟的信息,然后通过控制信号控制多路选择芯片进行通道选择,通过驱动电路和发射电路即可产生给定频率的双极性脉冲信号,此时便完成了信号的发射。对回波信号的调理可以通过FPGA控制程控放大芯片加上滤波电路来完成,再通过AD芯片对信号进行采集,便完成了对回波信号的采集。采集到的波形数据会先进入FPGA的FIFO模块进行缓存,然后FPGA会对波形再次进行滤波处理,以进一步排除噪声的干扰。滤波之后的波形数据会进行到时与幅值的提取,FPGA会将提取的到时、幅值与时间、方位信息等一起存入NandFlash,此时整个系统的数据采集工作就完成了。
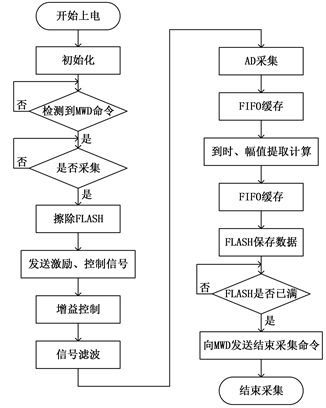
Figure 9. Overall flowchart of the system
图9. 系统总体流程图
6. 系统测试与分析
超声井壁成像测井装置主要由计算机、学生电源、测井硬件电路板、超声换能器、电机、模拟井实验平台、水槽等组成,整体架构模拟示意图如下图10所示,计算机负责对采集到的超声信号数据进行处理,转变成图像数据进行展示,并且与测井电路板之间通过串口进行通信,控制发射的超声信号频率、信号发射与采集的频次以及采集到的信号存储,电路板的供电通过学生电源提供。超声换能器探头是自发自收探头,放置在模拟井筒中间。
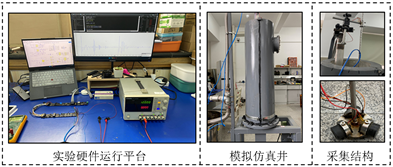
Figure 10. Ultrasonic well wall imaging logging device
图10. 超声井壁成像测井装置
图11为算法仿真的波形图,其中这段波形由600个采样点构成,由图知,FPGA仅用3.75 us即可得到这段波形的到时点,如图所示,到时点为204。
图12为由发射电路产生的三路发射波和换能器接收到的三路回波,发射波和回波都经过了放大和滤波处理,这是由示波器显示出的图像。
图13为FPGA的片上逻辑分析仪通过编译软件显示的图像,由图可看出,在首波到达处,FPGA根据相关匹配算法准确提取到了回波信号的到时,到时点的位置为182。
7. 系统测试与分析
1) 数据采集系统总体方案与电路设计合理,器件选型能满足系统设计的需要,功耗低,体积小。
2) 信号处理得当,能有效滤除系统噪声,保留有效信号。
3) 对相关匹配算法进行了简化,缩短了算法运算时间,提高了系统的实时性。