1. 引言
旋耕机作为农业生产中不可或缺的设备,其常与拖拉机协同工作,完成了耕耘、翻土等重要农田作业。在这一机械体系中,旋耕刀被认为是至关重要的组成部分,通过传递动力,赋予旋耕机强大的碎土能力和耕后地表平整的特点,因而在农业领域得到了广泛应用 [1] 。同时,通过切碎埋在地表以下的根茬,旋耕机也为后续的播种机作业提供了理想的种床条件。在旋耕刀刀刃的设计方面,传统方法存在明显局限,由于缺乏准确的强度计算方法,常常采用加大安全系数的策略来确保强度要求达标。然而,这种保守的设计方式缺乏理论研究支持,导致刀具设计过于谨慎,难以实现其性能的充分优化。同时由于设计的不科学,刀具在实际耕作中容易发生折断等故障,进而影响整个旋耕机的正常运行 [2] 。
旋耕刀片的结构参数是决定其旋耕机工作效率的重要因素,它与旋耕机的切土效果、切土功耗息息相关,因此在国内外,许多研究人员都对旋耕刀的几何结构参数以及与切土功耗相关的问题进行了深入研究。在这方面,一些有影响力的研究成果为旋耕刀的性能优化提供了有益的理论基础。Hendrick和Gill设计出正切刃,由侧切刃首先对未切开的新土壤进行翻土而不接触正切刃,这大大降低了旋耕机的功耗同时提升了效率。Rosetal研究了旋耕刀几何结构参数对整体功耗的影响,设计出旋耕刀虚拟仿真系统,通过仿真系统为优化设计提供科学依据。Jsl J H从理论上对旋耕机的功耗进行了分析,得出了旋耕刀片的结构尺寸对其功耗条件有很大影响。张柯柯等利用UG软件对旋耕机刀具的力学性能,尤其是应力分布情况进行了仿真分析 [3] 。
ANSYS Workbench在有限元仿真方面具有显著的优势。其全面集成的协同仿真环境使得用户能够更轻松地进行结构仿真分析。通过直观的图形用户界面可以方便地建立和修改模型,施加载荷并设定边界条件,选择适当的求解器进行求解。此外,ANSYS Workbench还提供丰富的预处理和后处理工具,使用户能够深入了解仿真结果,并通过参数化设计和优化来改进产品性能。其强大的求解算法和高效的计算性能确保了准确可靠的仿真结果,从而能够更快速、更精确地进行产品设计和优化 [4] 。
本文利用SOLIDWORKS软件对某农用III型浅耕旋耕刀进行三维实体建模,对其几何结构与受力情况进行了分析,其次,在ANSYS Workbench环境下对旋耕刀模型进行有限元分析并得到其应力、应变及变形情况,并针对旋耕刀进行拓扑优化分析,通过对比优化前后的结果,证明刀具可在降低应力与变形量的条件下同时减重近30%,对旋耕刀的后续设计改进与轻量化研究有指导作用。
2. 旋耕刀的结构与受力分析
国家标准(GB/T 5669-2017)对旋耕刀型式、范围及尺寸有明确规定,根据使用用途,旋耕刀可以分为主要用于水旱田耕作的I型旋耕刀,主要用于水田绿肥等田间作业的II型旋耕刀和主要用于浅耕的III型旋耕刀三种型号 [5] ,本文所选用的即为主要用于浅耕作业的III型旋耕刀,主要由正切面(正切刃)、侧切面(侧切刃)和过度面(过度刃)组成,如图1所示。
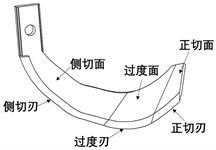
Figure 1. Structural diagram of rotary tiller
图1. 旋耕刀结构图
旋耕机在工作时,旋耕刀刃对土壤进行翻土、切削破碎及抛掷操作时,土壤也反作用于刀刃而形成了土壤阻力,如图2所示。一般情况下,由于旋耕刀相对于平面的垂直轴向受力较小,可以在分析中被忽略 [6] 。为了更细致地研究这一过程,我们可以将土壤阻力沿两个坐标轴方向分解成两个独立的分力,则有:
亦可将土壤阻力F沿着土壤和刀刃作用点的法线与切线方向拆分成两部分,分别为法向力 和切向力
,则有:
此时,我们发现土壤阻力F的切向力
会在刀辊的转动中心上产生一个扭矩M,扭矩大小可以表示为:
(1)
上式(1)中,r即为土壤阻力F的作用点至旋耕刀刀辊转动中心的距离。
3. 旋耕刀的模型建立
在SOLID WORKS三维建模软件中,为了高效而准确地对旋耕刀的尺寸形状进行3D建模,描点法是目前被公认的最佳方法。首先测绘出旋耕刀的详细尺寸,根据尺寸确定其在建模软件中相关关键点的坐标,随后通过平滑曲线将这些点有机地连接起来,从而形成了旋耕刀的二维表面轮廓 [7] 。在此基础上,使用SOLIDWORKS的拉伸、旋转和切割等功能,将曲线沿着特定方向拉伸为三维形体,并使用切割命令雕刻或裁剪出旋耕刀的精确形状,确保最终的三维实体模型符合设计要求。这一过程既利用了建模软件强大的功能,又充分发挥了描点法在快速建模和精准性方面的优势,如图3所示。
4. 有限元模型的建立
在旋耕刀三维模型建立好以后,需要对其进行有限元结构仿真,模拟刀刃在实际作业中的受力情况,对刀具所承受的应力、应变及刀具发生的变形进行理论分析 [8] 。旋耕刀有限元分析的基本流程为,首先导入模型并赋予模型指定材料,其次进行网格划分并施加一定的边界条件及载荷,使其能基本模拟刀具实际工作时的受力情况,最后添加相关云图,求解后进行结果分析。有限元分析可以利用数学近似的方法对真实的几何和载荷工况进行模拟,已经成为一种重要的数值分析工具。
4.1. 模型导入及材料赋予
ANSYS Workbench和SOLIDWORKS之间的协同接口为工程师提供了无缝的转换平台。在SOLIDWORKS中完成旋耕刀模型的创建后,为了简化仿真计算,可以考虑去除在刀柄处对仿真结果没有影响的倒角部分并以x_t格式保存,然后导入到ANSYS Workbench中进行静态结构仿真、拓扑优化及优化后重分析等工作。65 Mn钢通常被选用作为旋耕刀的材料,它的相关材料参数如表1所示,这类型材料的刀片具备出色的耐用性,因而能够维持相当长的使用周期,并满足机械性能的要求 [9] 。在ANSYS Workbench的工程数据模块中,可以设定并应用这一材料数据到整个旋耕刀模型中。

Table 1. Material parameters of rotary tillers
表1. 旋耕刀的材料参数
4.2. 旋耕刀载荷的施加
旋耕刀在作业中受到诸如刀轴转速、旋耕机组前进速度、耕深、土壤含水率、土壤坚实度和土质等多方面因素对其载荷的综合影响。刀轴转速和机组前进速度直接关系到旋耕刀与土壤相互作用的频率和速度,耕深则决定了旋耕刀对土壤的穿透深度。土壤含水率和坚实度直接影响土壤的质地和抗压性,从而直接影响旋耕刀的性能。土质的差异也会导致在不同类型的土壤中旋耕刀所受的阻力和反作用力的变化 [10] 。除此以外,残茬的存在会对旋耕刀的工作提出独特的要求、旋耕刀的种类以及它们在旋耕机上的布置方式等因素也会在不同的工作条件下展现出各异的性能表现。因此,在旋耕刀的设计和优化过程中,必须全面考虑这些因素,以便更有效地适应多样化的工作环境和需求。
旋耕刀在运转时与发动机功率之间相互关联,二者之间的联系可表示为:
(2)
(2)式中,
——旋耕机转轴的扭矩大小,数值为
;
——旋耕刀的反转角速度,与转速的关系为
;
——每个旋耕刀作业中受到的载荷大小;
——旋耕机的进给速度,约等于
。
经过简化后,可以根据一些基本参数来计算出每个刀刃所受到的载荷大小:
(3)
对于本次选用旋耕机与刀具型号,其发动机引擎功率P = 6 KW,工作时刀片轴线转速n1 = 280 r/min,回转半径R = 190 mm,代入(3)式后可得单个刀刃所受载荷F = 540 N。
4.3. 网格划分及边界条件加载
对于旋耕刀的网格划分,本文采用四面体补丁适形算法实现更为灵活和准确的网格划分,确保刀具表面和结构的几何细节得到更好的保留,此算法通常能够有效地处理复杂几何形状,避免生成过多的畸变或失真的元素,在有限元分析中,常用此方法来提高模型的精确性和仿真结果的可信度。同时施加单元尺寸为3 mm,可以在保持计算效率的同时,更精细地划分关注区域,提高仿真的准确性。如图4所示,旋耕刀单元数为23,547,节点数为13,657。
在旋耕机工作时,通过刀具上的装配孔将旋耕刀安装固定在旋耕机上,因此有必要在旋耕刀的装配孔位置施加必要的固定约束。在旋耕刀刚开始对泥土进行耕种时,侧切刃率先与土质接触刨开泥土,随着耕种的持续进行,过渡刃和正切刃再依次与土壤接触并进行土壤切削作业。因此,旋耕刀作业时受力

Figure 5. Rotary tiller boundary conditions are imposed
图5. 旋耕刀边界条件施加
的力的边界条件为:假设土壤完全接触旋耕刀的时间为3秒,分三个时间步依次在侧切刃、过渡刃和正切刃的位置施加垂直于刃口方向的540 N的力,每个刃口完全受力时间为1秒,线性增加后维持至时间结束。此外,可通过添加总变形、应力和应变等参数以便对后续结果进行观察分析,具体示意见图5。这一设定有助于模拟旋耕刀在实际工作中受到的力,并提供了深入理解其受力情况的途径。
4.4. 结果分析
从对旋耕刀的分析结果可以明显观察到几个关键的趋势:首先,在距离固定约束(安装孔)最远的位置,也就是旋耕刀的正切部,总变形达到最大值1.8 mm,这揭示了正切部的刚度较低,是整体结构中的相对薄弱点,而刀柄处表现出最小的变形,具体示意见图6。其次,最大的应力发生在受到约束的区域附近,即刀把与刀背交界区域,应力集中的峰值达到了317.31 MPa,这与实际作业中的旋耕刀折断部位相符,从而进一步证明了有限元仿真分析结果的可靠性,同时通过观察也可得知正切部的应力较小,详见图7。最后,在弹塑性应变方面,最大和最小值的位置与应力结果保持一致,如图8所示。这一结论为后续旋耕刀的设计改进和性能优化提供了重要的指导,基于对旋耕刀在实际工作中受力行为的深入理解,我们可以有针对性地调整和优化刀具的结构和材料,以提高其耐久性和性能表现。
5. 旋耕刀的拓扑优化
拓扑优化是一种工程设计中的常用手段,通过自动调整结构的材料分布,以实现最佳性能和重量的平衡。通过数学优化算法,在满足给定约束条件的前提下,寻找最优的结构形态,使得其在承受外部载荷时能够达到最佳性能 [11] 。旋耕刀的优化对于提高农业机械的性能、降低能耗、延长使用寿命具有重要意义。通过优化设计,可以实现旋耕刀结构的轻量化,提高其耐磨性和强度,从而减少机械损耗和能源消耗。优化还能够改善旋耕刀在土壤中的运动和切削特性,提高作业效率,减小农业生产对土地的影响 [12] 。
5.1. 优化模型的建立
在ANSYS Workbench中建立旋耕刀的拓扑优化任务,首先将前文静力学分析中的材料、模型和相关设置同步拓扑优化任务。其次选择拓扑优化区域,定义静力分析中的边界条件为排除区域,即排除旋耕刀的装配孔和三个刀刃。最后定义响应约束为保留70%旋耕刀质量。提交分析并求解,经17次迭代后的优化后拓扑密度模型如图9所示。
5.2. 模型重构及重分析
对优化后的模型进行合理的修正重构,通过对缺陷面的修复、填充合并,并对刀具一些细节进行修改和增补,得到优化重构以后的旋耕刀三维模型,如图10所示。
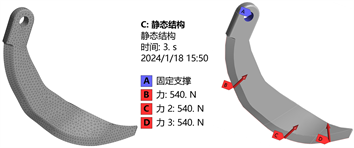
Figure 11. Reconstruct the mesh density and boundary conditions of the model
图11. 重构模型的网格密度和边界条件
为验证拓扑优化后结构的可靠性,对旋耕刀重构模型再次进行静力学分析,添加同样的网格密度和边界条件进行求解,如图11。求解后的得到的应力、应变和变形结果见图12,图13。
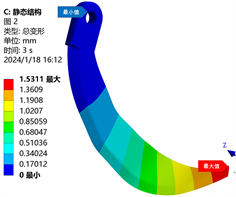
Figure 12. Reconstruct the results of the model deformation analysis
图12. 重构模型变形分析结果

Figure 13. Reconstruct the stress and strain analysis results of the model
图13. 重构模型应力应变分析结果
观察重构模型结果可知旋耕刀在拓扑优化后的总变形达到1.53 mm,最大应力为298.89 mm,且变形、应力的最大位置与优化前基本相同。优化前后的应力、变形对比如表2所示。
Table 2. Comparison of the optimization results of rotary tillage
表2. 旋耕刀优化结果对比
通过结果对比可发现,旋耕刀在拓扑优化后的最大变形,最大应力相较于优化之前均有减小,同时旋耕刀质量也从优化前的0.58 Kg减至0.41千克,有效证明了拓扑优化的可靠性与有效性。
6. 结论
本文深入研究了旋耕刀的结构及其在工作中的受力情况,对某农用III型浅耕旋耕机中单个刀具载荷进行了理论计算,运用SOLIDWORKS软件构建了旋耕刀精准的三维模型,利用有限元软件ANSYS Workbench进行了应力、应变与变形等静力学分析,并对旋耕刀模型进行了拓扑优化重构与优化后模型的重分析。从分析结果中得出以下结论:
1) 旋耕刀在作业时所受载荷的大小与旋耕机转轴的扭矩、旋耕机进给速度、旋耕刀的反转角速度等多个参数有关,实际操作时要合理控制相关参数的大小,确保载荷施加合理。
2) 旋耕刀最大应力集中处出现在刀把与刀背交界区域附近,与实际生产过程中旋耕刀口折断位置高度吻合。同时,总变形最大处于旋耕刀的正切部,突显了正切部的刚度相对较低,在设计中应特别重视改善刀尖处的刚性。
3) 旋耕刀进行拓扑优化可以在减轻近30%质量的条件下同时减小其最大变形量与最大应力值,这有助于提高刀尖的刚度,改善刀具因应力集中而发生折断的情况,也满足了轻量化的设计需求。