1. 引言
在土木工程和水利工程建设中,经常需要对河流进行水文调查。在获得河流的相关测量信息后,可应用于河流防洪建设、跨河桥梁建设、河底管道建设等。因此,河床断面的测量是水文调查工作的重要组成部分。在常规的小尺度河床断面测量项目中,常用的测量方法是采用全站仪或RTK进行断面测量 [1] [2] [3] 。
使用常规测量方法测量河床横截面时,需要将棱镜杆或RTK移动站测量杆的底部放置在河床顶面上,测量人员需要下水或乘船到河面工作。由于测量程序复杂,测量人员在操作中存在一定的危险性,因此迫切需要使用更安全可靠的装置进行河床断面测量 [4] [5] [6] [7] 。本文采用500kHz声波传感器作为水下距离探测装置,安装GNSS-RTK平面定位模块,构成水下河床断面测量装置。通过对实测数据的分析,得出了水下超声波测距的基本规律,为中小河床断面测量提供了一些参考意见。
2. 装置设计
随着测量技术的不断发展,市场上出现了许多先进的工程水下地形观测装置 [7] - [13] 。结合工程测量需要,利用超声波原理和GNSS-RTK平面定位原理设计了该装置,该装置包括定位系统、测量系统和数据存储系统 [14] - [19] 。
2.1. 超声波测距传感器的原理
超声波是一种频率高于20 kHz的机械波,它具有反射率强、能量集中、方向性好等特点,被广泛应用于各个领域 [20] [21] [22] [23] [24] 。超声波可以简单地分为横波和纵波,它们在水下以一定的速度传播。当超声波碰到障碍物时,会反弹回来,然后传感器捕捉到的一部分超声波被转换成电信号。传感器与前方障碍物之间的距离可由式(1)计算。
(1)
式中,S为传感器与前方障碍物之间的距离,T是超声波从发射到接收的时间,V是超声波的速度。
超声波传感器主要由压电晶体或镍铁铝合金组成。该传感器的输出能量相当可观,机电耦合系数相当大,因此工作灵敏度高,可满足高负荷工况下的运行要求。主要技术指标如表1所示。超声波传感器数据传输如图1所示。

Table 1. Ultrasonic sensor specifications
表1. 超声波传感器技术指标

Figure 1. Schematic diagram of data transmission for ultrasonic sensors
图1. 超声波传感器数据传输原理图
2.2. 高程测量系统
高程测量系统由传输频率为500 kHz的超声波传感器和USB-TTL信号转换器组成。采集到的数据通过STM32芯片和无线传输设备传输到计算机。其芯片主控程序电路图如图2所示。
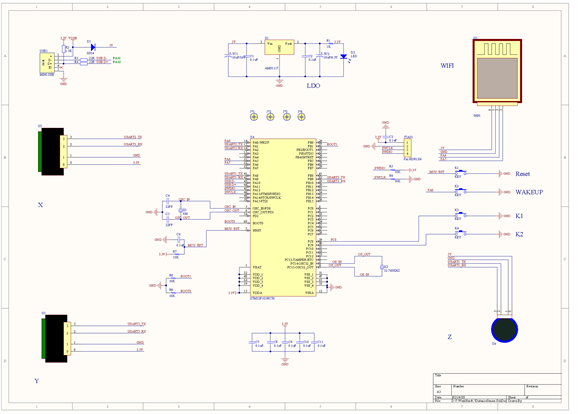
Figure 2. Circuit diagram of the STM32 chip’s main control programs
图2. STM32芯片主控程序电路图
2.3. 测量误差及校正与平面定位系统
根据GB50026-2007对水下河床空间坐标仪的测量误差进行了修正。修正后的测量误差见表2。水下河床空间坐标自动装置如图3所示。平面定位系统根据RTK定点差分法原理工作,其电路逻辑框图如图4所示。
Table 2. Water depth error at the same measuring point
表2. 同一测点水深误差

Figure 3. Automatic device for spatial coordinates of underwater riverbed
图3. 水下河床空间坐标自动装置
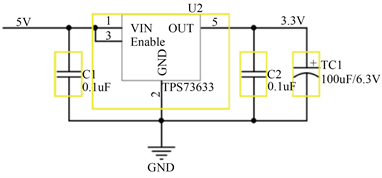
Figure 4. RTK circuit logic block diagram
图4. RTK电路逻辑框图
3. 软件设计
软件设计的目的是将超声波传感器修改后的水深数据与GNSS-RTK的大地测量数据组成三维坐标。软件设计过程如图5所示。该软件采用了远程传输系统的设计,可实现5G高速网络进行数据传输。
通过在STM32芯片上编写定位程序,实现对控制单元平面定位的实时控制。仰角系统中超声波传感器采集的信号通过STM32芯片传输到计算机。

Figure 5. Demo program display interface
图5. 演示程序显示界面
4. 结果与讨论
4.1. 全站仪的测量
使用全站仪进行测量需要皮划艇、棱镜、测手器等,全站仪调平校正后,选取一个坐标基点作为岸上测量基准点,开始测量操作。从图6可以看出,全站仪所测量的河床误差分布较为分散,不利于测量数据的修正。从图6和图7可以看出,高程呈先降低后升高的趋势,与真实河床相比,全站仪测得的河床高度有较大差异,其中误差组的标准差高达12.229。原因可能是由于淤泥的存在、测量员的技术、河流流速等原因造成的。

Figure 6. Total station riverbed measurement error map
图6. 全站仪河床测量误差图

Figure 7. Total station riverbed survey map
图7. 全站仪河床测量图
全站仪测得的河床断面如图8所示。结果表明,全站仪测得的河床断面与实际河床断面存在较大误差,其中最大误差为632 mm,最小误差为100 mm。通过测量数据发现,全站仪测量数据均高于大于实际河床断面,原因可能是全站仪在测量河床断面时,会受到河床水流波动的影响,形成较大误差,而且河道杂物多,导致测量时信号反馈的较快。
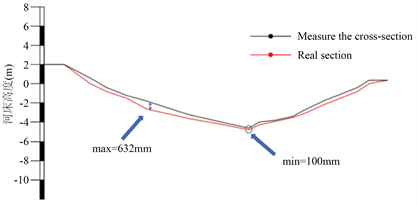
Figure 8. Total station measurement section difference map
图8. 全站仪测量断面差异图
4.2. 新装置的测量
在采集水下河床空间坐标之前,确保设备连接的计算机能够接收到超声传感器的实时数据 [13] [14] 。在Demo软件中显示自动绘制的河床剖面图。处理后的河床剖面图如图9所示。从图9可以发现,新装置测量的曲线与实际河床的曲线几乎重合,说明新装置在测量河床上具有一定的可靠性和实用性。
新装置的测量过程如下:首先对便携式装置进行了调试。其次,将Demo软件中的误差设置调整为零。然后将该装置放置在流速不大于2.5 m/s的河面上。最后,开始测量操作。测量所需的工具包括一个电源单元、一个新设备、一台计算机等,相较于全站仪所需的测量的工具,相对更简单和方便,在测量河床上节省大量的人力和物力,且可以为实际测量时提供可持续检测。
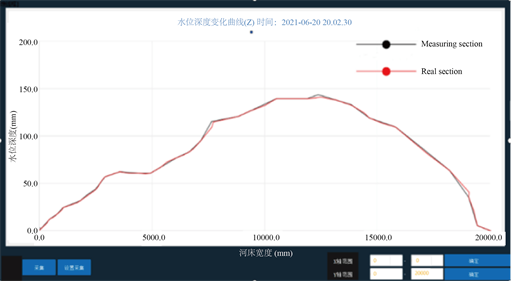
Figure 9. The difference between the measured riverbed section and the measured section
图9. 实测河床断面与实测断面的差值
图10、图11分别为装置河床测量示意图和装置河床测量误差图。从图10可以看出,真实河床高程与该新装置测得的河床高程相似。从图11可以看出,河床高程测量误差两侧高、中间低。结果表明:测量的最大误差为12 mm。误差组的标准差为3.749,相较于全站仪,测量数据的波动性较小,测量结果更为可靠。
经过反复的测量研究,新装备发现出现较大的误差的主要原因是由于装置受到河流速度的影响,如图12所示。在测量河床时,装置采集到的河床高程(
)与实际河床高程(
)的关系如(2)所示。
(2)
式中,
为装置采集到的河床高程,
为与垂直角度值的偏差,
为河床的仰角距离。还安装了一个水平气泡,以确保装置的绝对垂直度。

Figure 10. Schematic diagram of the device measurement
图10. 装置测量示意图
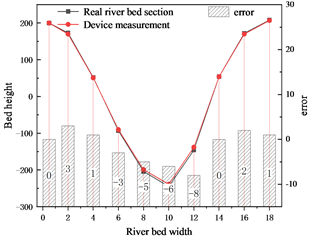
Figure 11. Measurement error diagram of the device riverbed
图11. 装置河床测量误差图
通过测量的结果,研究发现出现不同误差数值后,可对不同水深测量后的误差进行修正,见表3。
Table 3. Ultrasonic sensor specifications
表3. 超声波传感器技术指标
全站仪测得的河床断面如图8所示。结果表明,全站仪测得的河床断面与实际河床断面存在较大误差,其中最大误差为632 mm,最小误差为100 mm。通过测量数据发现,全站仪测量数据均高于大于实际河床断面,原因可能是全站仪在测量河床断面时,会受到河床水流波动的影响,形成较大误差,而且河道杂物多,导致测量时信号反馈的较快。
4.3. 工作效率与精度
新装置在河道测量时,测量员只需要通过无线装置远程控制装置,就可以在不同的点获取数据。图13为全站仪与新装置的工作效率差异。时间分布如图13(a)所示。从图13(a)可知,新设备测量各点河床标高相较于全站仪测量的所需时间较短,最高仅仅只需要30秒,而全站仪最高可达600秒,新装置所需要测量时间远小于全站仪,从而提高工作效率。测量总时间如图13(b)所示。通过图13(b)可知,采用新装置的总效率较全站仪提高了94.42%。
图14为基于全站仪和新装置的测量误差图。从图14可知,新装置的数据误差远小于全站仪的数据误差,如图14所示,装置的标准数据偏差为3.749,全站仪的数据标准差为12.229,可见该装置相较于全站仪的测量更为稳定,误差更少。

Figure 14. Measurement error based on total station and new equipment
图14. 基于全站仪和新装备的测量误差
4.4. 新装置的平面定位系统
通过初步的试验验证,平面定位系统的平面坐标误差主要与测量过程中的现场天气和测量位置有关。通过20个不同测量点位,分别在晴朗天气与恶劣天气时进行数据测量,得出误差数据。其中1~7号为河流急流位置(大于1 m/s),8~14号为河道缓流位置(小于0.3 m/s),15~20号为河道中速流位置(0.3~1 m/s)。其误差数据如图15所示。从图15可以看出,在晴朗天气下,河流急流的位置的平均误差值远大于河道中速流位置与缓流位置,分别提高了31.78%、59.61%,说明在晴朗天气下,河道的流速会使误差数值增大。再次观察图15可知,在恶劣天气和晴朗天气下,测量的数据整体趋势基本一致,其中在天气晴朗时,误差最大为8毫米,而在恶劣天气时误差最小为12毫米,最大可达到21毫米。原因可能是恶劣天气会来带较高的风速,导致测量设备的振动或移动,从而影响测量结果的稳定性。此外,较高的风速还可能携带灰尘、颗粒物等,而从降低传感器的清晰度,进一步影响定位系统的性能。
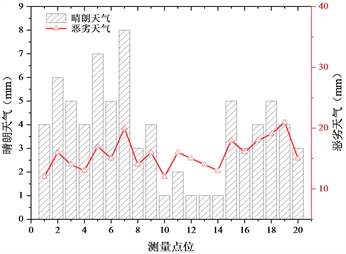
Figure 15. Schematic diagram of plane coordinate error
图15. 平面坐标误差示意图
5. 结论
全站仪的测量
该装置对河床断面进行测量,并在测量过程中自动捕获信息。该装置的应用解决了全站仪在水下测量中测量误差大、工作效率低等问题,并且该装置目前是一种体积较小、重量较轻的便携式装置。本研究主要得出以下结论:
1) 采用该装置进行河床断面测量。测量数据精度可达12 mm,这远高于现有全站仪的精度。
2) 该装置用于河床断面测量时,工作效率较全站仪提高了94.42%。
与全站仪测量的标准差12.229的测量稳定性相比,新装置的测量稳定性提高了69.34%。数据分析表明,该装置的测量误差波动比全站仪小得多,具有较高的稳定性。
参考文献