1. 引言
高精时间间隔测量技术在国民经济与国防建设中有广泛的应用且意义重大,如北斗卫星导航定位、雷达及激光测距、空间飞行精密定轨、原子物理等方面,是许多前沿科学和国家重大科学工程中的关键技术瓶颈 [1] [2] [3] [4] 。因此,研究精度达到皮秒量级的时间间隔测量方法具有重要意义。
目前,常见的时间间隔测量方法有时间–幅度转换法、电子计数法、游标法、抽头延迟线法等 [5] [6] [7] [8] [9] ,而使用最多的是抽头延迟线法,该方法可以获得的理论分辨率最高为10~20 ps,但实际单次测量精度只能达到100 ps rms左右 [10] 。2011年,芬兰Oulu大学的研究人员,使用时间–幅度转换法,利用最新的器件获得了接近1 ps rms的单次测量精度,但它对参考时钟源的稳定度要求极高,还处于实验室研究阶段 [11] 。2013年,捷克共和国科学院捷克Pánek等研究人员,使用声表面波滤波器作为时间插值器,获得了0.7 ps rms的单次时间间隔测量精度 [12] [13] [14] 。2018年,波兰时间频率测量中央实验室Albin Czubla等研究人员,获得了10 ps rms的测量精度 [15] 。2015年,中国科学院上海天文台的科研人员利用声表面波编码器件作为时间内插器,将时间内插法和编码信号自相关函数的高信噪比特性相结合,利用一种完全有别于传统的时域互相关对时延进行测量的算法,获得了1.2 ps rms的单次时间间隔测量精度 [16] 。2017年,长春理工大学严培辉等人,采用双环形振荡器作为时间内插器,将时间内插法和逐步逼近法相结合,再利用时域互相关算法获得了20 ps rms的时间间隔测量精度 [17] 。2022年,西安电子科技大学的研究人员利用声表面波滤波器作为事件内插器,获得了5.75 ps rms的单次测量精度 [18] 。但目前国内基于声表面波滤波器内插的单次时间间隔测量精度还达不到国外的相应指标,为了突破卡脖子技术,国内自主研发单次测量精度达到1 ps量级时间间隔测量设备具有重大现实意义。
声表面波滤波器(Surface Acoustic Wave Filter, SAWF)在信号处理系统中被广泛应用,其具有良好的带通性能,且具有体积小、结构简单、可靠性高等优点,且声表面波器件是一种无源器件,它是在单晶材料上用半导体平面光刻工艺制作的,声表面波在单晶材料中的传播速度是不变化的 [19] ,因此,适合作为时间内插器 [12] [20] [21] 。本文对窄脉冲激励SAWF的过程进行理论分析,建立相应的数学模型和误差传播模型,并进行仿真实验与分析,确定为获得1 ps rms单次时间间隔测量精度,所需测量系统中各器件的优化参数值,给出减小测量误差,提高时间间隔测量精度的方法与措施。
2. 基于声表面波滤波器的时间间隔测量方法
基于SAWF的时间间隔测量方法如图1所示。
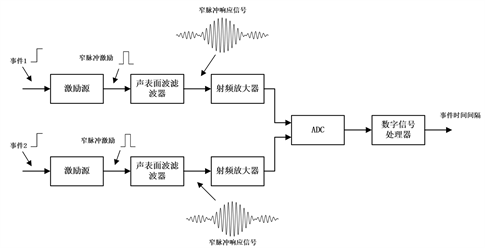
Figure 1. Schematic diagram of time interval measurement method based on surface acoustic wave filter
图1. 基于SAWF的时间间隔测量方法示意图
本文使事件通过激励源产生代表事件的窄脉冲,再用窄脉冲去激励SAWF,其窄脉冲响应信号为一个带通信号。当两路具有一定时延的事件分别通过激励源后,其产生的两路窄脉冲即可代表两个事件,将这两路窄脉冲分别激励SAWF后,对窄脉冲响应信号进行采样。当采样结束后,并对两路采样信号进行互相关运算,即可得到两事件时间间隔估计值。
2.1. 基于三次样条插值的时域互相关算法
本文对事件之间的时间间隔测量采用了时域互相关和三次样条插值的方法。若提高采样频率对信号进行采样,数据处理工作量大,而通过三次样条插值既可以提高其时间间隔测量的分辨率也可以节省数据处理时间。具体将时域互相关分为两部分,粗相关和细相关,将两路信号做粗相关处理,并根据粗相关值移位其中一路信号使两路信号对齐,随后进行三次样条插值提高分辨率,最后通过细相关处理得到基于粗相关移位后的细相关值,将两者相加即可得两路信号的时间间隔。
2.1.1. 三次样条插值
本文使用三次样条插值提高时间测量分辨率。若采样点存在于区间
中,那么有:
(1)
上式中,S(x)是采样点
上的三次样条函数。而若要将三次样条函数应用于插值,需符合相应的插值条件和连续性条件,设采样点xk上函数值:
(2)
那么其插值条件和连续性条件为:
(3)
(4)
(5)
(6)
为了保证三次样条插值函数的唯一性,通常可在区间
的端点a = x0和b = xn上各加入一个边界条件:
(7)
(8)
当插值条件、连续性条件和边界条件均满足后,三次样条函数就构造为了三次样条插值函数,且保证了其唯一性。
2.1.2. 时域互相关
在数字信号处理中,当需要研究两信号之间的时延,常常采用互相关函数进行计算。设时域互相关的两路信号波形一致,且具有一定的时延
,即:
(9)
(10)
上式中,θ为两路信号之间的时间间隔。
在实际情况下,对两路信号进行采样,设采样后信号为:
(11)
(12)
上式中,Ts为采样间隔,w1(nTs)和w2(nTs)为附加的噪声信号。随后对两路采样后的信号进行互相关运算,即可得:
(13)
将式(11)和式(12)代入式(13)中,那么上式可以表达为:
(14)
由于噪声w1(nTs)和w2(nTs)相互独立,且与信号s1(nTs)和s2(nTs)无关,因此式(14)可近似表达为:
(1)
式(15)中互相关函数R12(m)可以描述两路信号之间的相关性(相似性),对互相关函数取最大值,即:
(16)
上式中,
为相关函数R12(m)最大值所对应的两事件之间的时间间隔估计值。
2.2. 基于最小二乘的频域互相关算法
在时间间隔测量中,不仅有在时域下的互相关算法测量,也有频域下的互相关算法测量,这是完全有别于传统的时域互相关对时延的测量算法。
假设进行互相关的两路信号波形一致,且具有一定的时延
,即:
(17)
(18)
在实际情况中,对两路信号进行采样,设采样后信号为:
(19)
(20)
上式中,Ts为采样间隔,w1(nTs)和w2(nTs)为附加的噪声信号。随后对两路采样后的信号进行互相关运算,并作傅里叶变换,由相关定理可得:
(21)
上式中,X1(k)和X2(k)为加噪信号x1(nTs)和x2(nTs)的频谱,W1(k)和W2(k)为附加噪声w(nTs)和w2(nTs)的频谱。因为两路噪声信号相互独立且与信号无关,因此式(19)又可近似表达为:
(22)
式中S1(k)和S2(k)为原信号s1(nTs)和s2(nTs)的频谱,频域互相关函数的相角又可表示为:
(23)
由上式可知,频域互相关函数的相角φ(k)与数字频率k成线性关系,对互相关函数的相角进行最小二乘拟合,根据其拟合出的直线斜率便可求得时延
的估计值。
3. 时间间隔测量系统的数学模型
SAWF具有通带平坦,良好的带外抑制的特性,通过代表事件的窄脉冲去激励SAWF。设输入的窄脉冲激励信号脉宽为τ,幅值为E,即:
(24)
对上式中的窄脉冲激励信号进行傅里叶变换,其频谱为:
(25)
若将窄脉冲激励信号通过SAWF,设SAWF中心频率为f0,带宽为fB,则SAWF的频率响应函数为:
(26)
上式中t0为SAWF的群延迟,A ≤ 1为由SAWF的插入损耗确定的实常数,为了研究方便起见,在这里令A = 1,即SAWF的插入损耗为0 dB。
窄脉冲激励通过SAWF后的响应信号频谱可近似表达为:
(27)
对上式作傅里叶反变换,此时窄脉冲激励通过SAWF后的响应信号时域表达式为:
(28)
由式(28)可知,为使信号fSAWF(t)获得最大信噪比,则需:
(29)
则有:
(30)
因此,当窄脉冲激励信号的脉宽τ与SAWF中心频率f0满足式(30)中的关系时,信号fSAWF(t)可获得最大信噪比。
4. 误差传播模型
在实际的工程应用中,往往会由于元器件、仪器设备、环境因素等影响,导致最后获得的测量结果与真实值产生一定的误差,令测量误差为:
(31)
上式中,
为两事件之间的时间间隔估计值,
为两事件之间的时间间隔真实值。
通过计算和分析误差传播模型,可以确定减小测量误差,提高时间间隔测量精度的方法与措施,利用时域互相关计算两事件之间的时间间隔,可得到测量误差的传播模型如下 [21] :
(32)
上式中Ts为采样间隔,
是脉冲响应信号一阶导数的能量,
和
为脉冲响应信号一阶导数的采样值,w(nTs)为噪声的采样值。
测量系统的噪声主要可分为四种:激励的噪声、放大器的噪声、ADC的量化噪声以及采样时钟的jitter,如图2所示。

Figure 2. Four types of noise of measurement system
图2. 测量系统的四种噪声
4.1. 窄脉冲激励的噪声产生的测量误差
根据式(32),窄脉冲激励的噪声引起的测量误差的方差为 [21] :
(33)
上式中,εe为窄脉冲激励的能量谱密度,N0为激励噪声的功率谱密度,f0为SAWF中心频率,fB为SAWF带宽,由式(25)可知εe的表达式为:
(34)
为了获得最大输出信噪比,结合式(30)可知,此时εe表达式应为:
(35)
将式(35)代入式(33)可得:
(36)
由帕塞瓦尔定理可知:
(37)
将式(37)代入式(36),可得
(38)
窄脉冲激励与噪声We(t)的信噪比为:
(39)
将式(39)代入式(38),则有:
(40)
因此,测量精度为:
(41)
4.2. 射频放大器噪声产生的测量误差
根据式(32),射频放大器噪声引起的测量误差的方差为 [21] :
(42)
上式中,
为射频放大器噪声的方差,fs为采样频率,εe为窄脉冲激励的能量谱密度。式(34)代入式(39)中的εe可得:
(43)
窄脉冲激励与噪声Wa(t)的信噪比为:
(44)
则有:
(45)
因此,测量精度为:
(46)
4.3. 时钟和采样的抖动产生的测量误差
将采样值在nTs附近进行线性化,再根据式(32)可得时钟和采样的抖动引起的测量误差方差为 [21] :
(47)
上式中,
为时钟和采样抖动的方差。
因此,测量精度为:
(48)
4.4. 量化噪声产生的测量误差
根据式(32),量化噪声引起的测量误差的方差为 [21] :
(49)
上式中,q为采样的量化位数。
因此,测量精度为:
(50)
5. 仿真与分析
本文利用窄脉冲激励SAWF过程的数学模型和相应的误差传播模型,对窄脉冲激励的噪声、射频放大器噪声以及时钟和采样的抖动,这3类主要噪声引起的时间间隔测量误差进行仿真实验与分析,确定为获得1 ps rms单次时间间隔测量精度,所需测量系统中各器件的优化参数值,给出减小测量误差,提高时间间隔测量精度的方法与措施。
5.1. 窄脉冲激励的噪声产生的测量误差
由于SNRe通常很大(>100 dB),因此,窄脉冲激励的噪声引起的测量误差通常会很小,分别用4种不同的带宽fB:10 MHz、20 MHz、30 MHz、40 MHz代入式(41)进行仿真,结果如图3所示:

Figure 3. The measurement error is caused by the noise generated by the narrow pulse excitation
图3. 窄脉冲激励的噪声产生的测量误差
在实际测量中,SNRe通常很大(>100 dB),从图3中可知,当SNRe > 100 dB时,由窄脉冲激励的噪声引起的测量误差将会非常小,因此,由窄脉冲激励的噪声引起的测量误差几乎可以被忽略。
5.2. 射频放大器噪声产生的测量误差
对于射频放大器噪声引起的测量误差,在3种不同采样频率(fs = 1 GHz、2 GHz、4 GHz)下分别用4种不同的带宽(fB = 10 MHz、20 MHz、30 MHz、40 MHz)代入式(46)进行仿真,结果如图4、图5、图6所示:
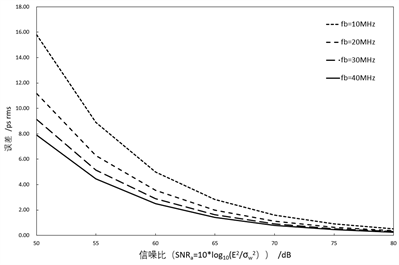
Figure 4. Measurement error caused by RF amplifier noise (fs = 1 GHz)
图4. 射频放大器噪声产生的测量误差(fs = 1 GHz)
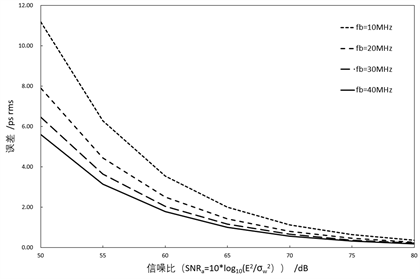
Figure 5. Measurement error caused by RF amplifier noise (fs = 2 GHz)
图5. 射频放大器噪声产生的测量误差(fs = 2 GHz)
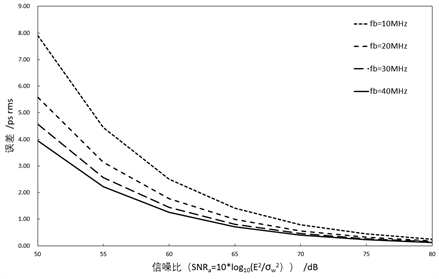
Figure 6. Measurement error caused by RF amplifier noise (fs = 4 GHz)
图6. 射频放大器噪声产生的测量误差(fs = 4 GHz)
从图4、图5、图6中可知,若要减小射频放大器噪声引起的测量误差,需要:
(1) 增大采样频率fs;
(2) 选择fB更宽的SAWF器件;
(3) 选择插入损耗更小的SAWF器件;
(4) 增大激励源输出窄脉冲激励信号的幅值E。
5.3. 时钟和采样的抖动产生的测量误差
对于时钟和采样的抖动(jitter)引起的测量误差,在3种不同采样频率(fs = 1 GHz、2 GHz、4 GHz)下分别用4种不同的带宽(fB = 10 MHz、20 MHz、30 MHz、40 MHz)代入式(48)进行仿真,结果如图7、图8、图9所示:
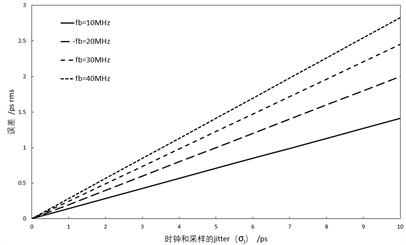
Figure 7. Measurement errors due to clock and sampling jitter (fs = 1 GHz)
图7. 时钟和采样的抖动产生的测量误差(fs = 1 GHz)
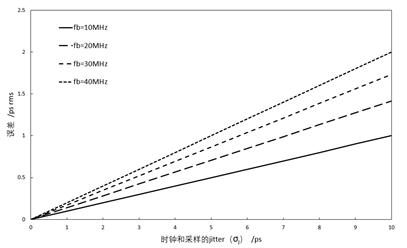
Figure 8. Measurement errors due to clock and sampling jitter (fs = 2 GHz)
图8. 时钟和采样的抖动产生的测量误差(fs = 2 GHz)
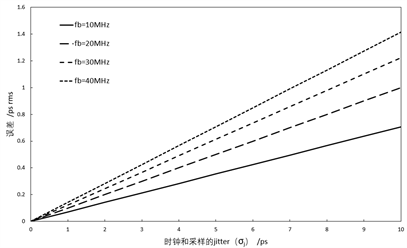
Figure 9. Measurement errors due to clock and sampling jitter (fs = 4 GHz)
图9. 时钟和采样的抖动产生的测量误差(fs = 4 GHz)
从图7、图8、图9中可知,若要减小时钟和采样的抖动引起的测量误差,需要:
(1) 增大采样频率fs;
(2) 选用fB较窄的SAWF器件;
(3) 尽量使用抖动σj更小的时钟源作为采样时钟。
另外,当σj < 2 ps rms时,由时钟和采样的抖动(jitter)引起的测量误差将会非常小,因此,由时钟和采样的抖动(jitter)引起的测量误差几乎可以被忽略。
5.4. 采样的量化噪声产生的测量误差
对于量化噪声引起的测量误差,在SAWF的带宽fB = 20 MHz和SAWF的中心频率f0 = 100 MHz下分别用3种不同采样频率(fs = 1 GHz、2 GHz、4 GHz)代入式(50)进行仿真,结果如图10所示:
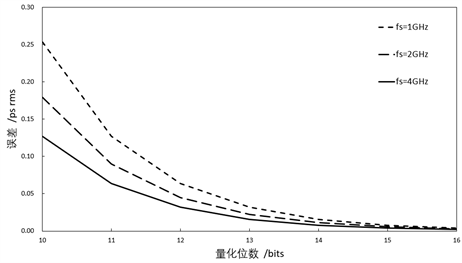
Figure 10. Quantifying the measurement error generated by noise
图10. 量化噪声产生的测量误差
从图10中可知,当量化位数q ≥ 10 bits时,由量化噪声引起的测量误差将会非常小,因此,由量化噪声引起的测量误差几乎可以被忽略。
5.5. 时间间隔测量单次精度达到1 ps rms的测量参数仿真
由上面的讨论可知:当SNRe > 100 dB且q ≥ 10 bits时,由窄脉冲激励的噪声以及采样的量化噪声分别引起的测量误差都可以被忽略。
为此,假设窄脉冲激励与噪声We(t)信噪比SNRe为100 dB,采样的抖动σj为1 ps rms,SAWF的带宽fB为30 MHz。通过改变信噪比SNRa和采样频率fs,根据式(46)和式(48)得到时间间隔测量的精度如表1所示。
由表1可知,当信噪比SNRa为70 dB,采样频率fs为1 GHz时,时间间隔测量的单次精度为0.95 ps rms,接近1 ps rms。令窄脉冲激励的幅值为4 V (实际测量时,可以达到这个电压),将信噪比SNRa = 70 dB代入式(44)可得,射频放大器的噪声功率
,将该噪声加到信号fSAWF(t)上,信号fSAWF(t)由式(28)给出,它是窄脉冲激励通过SAWF后的响应信号,然后,将加入噪声的两路预设间隔为100 ps的fSAWF(t)信号进行互相关运算,得出两路信号之间的时间间隔,分别进行1000次时间间隔测量,将测量结果绘制成图11所示的直方图。

Table 1. The influence of SNRa and sampling frequency fs on the measurement accuracy of time interval
表1. 信噪比SNRa和采样频率fs对时间间隔测量精度的影响
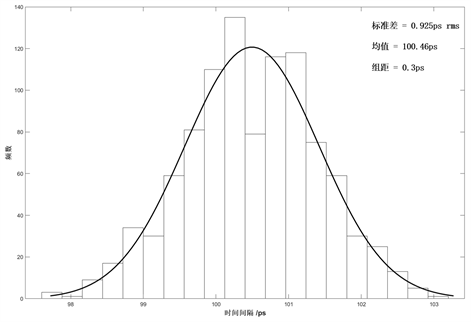
Figure 11. Histogram of simulation values for 1000 times interval measurements
图11. 1000次时间间隔测量仿真值直方图
由图11可知,测量结果成正态分布,时间间隔测量的精度为0.925 ps rms,均值为100.46 ps。显然,该仿真结果与理论值(精度0.95 ps rms且时间间隔100 ps)非常接近,验证了该时间间隔测量系统的数学模型和误差传播模型的正确性,单次测量精度达到了1 ps rms。
由图11可知,测量结果成正态分布,时间间隔测量的精度为0.925 ps rms,均值为100.46 ps。显然,利用含噪窄脉冲响应信号模型经过时域互相关后所得出的仿真结果与误差传播模型的理论计算值(精度0.95 ps rms且时间间隔100 ps)非常接近,验证了该时间间隔测量系统的数学模型和误差传播模型的正确性,单次测量精度达到了1 ps rms。
6. 结论
本文对基于声表面波带通滤波器时间内插的时间间隔测量方法进行理论研究与分析,建立了测量系统数学模型和相应的误差传播模型,并进行了仿真验证与分析。利用误差传播模型,着重分析了4类主要噪声引起的测量误差,得到了相应的测量误差关系式。通过仿真获得时间间隔测量单次精度达到1 ps rms时的系统参数,利用互相关算法计算两路事件之间的时间间隔,重复1000次测量,得到时间间隔测量精度为0.925 ps rms,均值为100.46 ps,结果成正态分布,仿真结果与理论值之间具有很好一致性,充分验证了该时间间隔测量系统的数学模型和误差传播模型的正确性,单次测量精度达到了1 ps rms。
基金项目
上海航天科技创新基金(SAST2022-094)。
NOTES
*通讯作者。