1. 引言
在现代社会中,机械臂随处可见,尤其是在日常生活和工业生产中,同时,它工作时的周围环境和情况也十分复杂,全靠机械臂的普通位置控制已经不能满足安全性与柔顺性的要求。如今机械臂发展的主流趋势就是人/机械臂相互协作,共同生产,极大地提高了日常生产的效率。稳定性与柔顺性是机械臂生产环节中不可或缺的一部分,针对这一重要部分,国际上各种科研人员做了大量的科研学术,提出了好几种控制方法,例如:自适应控制,神经网络控制,滑模控制等等,相比之下阻抗控制具有鲁棒性强,不易受干扰,计算相对简便以及易于应用到模型上等优点。所以国际上的专家学者对此十分关注。
阻抗控制最早由科学家HOGAN [1] 在1985年首次系统的阐述了其概念,通过控制主动力来创建一个偏差与外界力的关系。但没有实现对力进行精确度控制。刘慧博等 [2] 设计了一种滑膜阻抗控制器来应对机械臂在移动中遇到障碍物时会产生位移的问题,适当降低了控制过程中的抖振。李焕等 [3] 设计了一种控制位置内环的阻抗控制,这种控制方法可以对机械臂与障碍物的接触力进行控制,从而达到力/位混合柔顺控制的效果。张合新等 [4] 设计了一个双幂次趋近律,该趋近律可以提高系统响应速度,降低控制过程中的抖振问题,以及系统响应时间长等问题,有效的提高了系统收敛速度。文献 [5] 设计了一种迭代重复控制方法,对机械臂进行相似动作时的精度提高有显著效果。文献 [6] 在控制机械臂轨迹中加入了神经网络自适应控制,这种控制方法可以详细检测到机械臂运动轨迹的误差值。文献 [7] 为了在机械臂滑模控制中增强系统的稳定性,使用了一种非线性的LMI指数收敛观测器,有效增加了系统的稳定性。文献 [8] 提出基于RBF神经网络二次泛函的最优控制,使得系统可以减少误差。文献 [9] 改进了滑膜切换函数的参数,并有效降低了控制时的抖动,增强了系统的鲁棒性。文献 [10] 设计了一种阻抗粒子群控制算法,有较好的控制效果。
有限时间控制方法因其具有抗扰动性强,收敛速度快、误差小的优点,近年来引起了学者们的关注。李刚等 [11] 将输出约束和有限时间阻抗控制相结合,阻抗控制可以让机械臂可以更好的跟踪期望轨迹,对机械臂的稳定性和鲁棒性有很大的提升 [12] 。
上述文献中使用各种控制方法对机械臂进行阻抗控制,但跟踪误差较大,精度较低,针对这一问题,本文提出了一种基于实际有限时间双幂次滑模机械臂阻抗控制方法,并通过仿真实验验证了本文所设计的基于实际有限时间双幂次滑模控制方法是有效的,该方法相比其他控制方法的优越性在于:
1) 首次将实际有限时间控制和双幂次滑模控制相结合,实现了机械臂在有限时间内可以较好的进行阻抗控制。
2) 与文献 [13] 中的控制方法相比,本文所提的方法具有更小的跟踪误差,更高的跟踪精度并提高了响应速度。
2. 机械臂模型
关节角度和关节角速度是建模过程中很重要的两个参数,所以将设计一个执行器来施加关节扭矩τ进行跟踪,并将机械臂模型通过关节角度来动力学建模 [6] 。
然而,在实际工程中,我们经常先建一个工作空间 [14] ,用直角坐标
来表示机械臂在工作空间中的末端节点,通过设计一个控制律
加在机械臂末端节点,通过
与
之间的映射关系,求出实际的关节扭矩τ。同时需要将工作空间直角坐标与关节角坐标进行转换 [15] 。
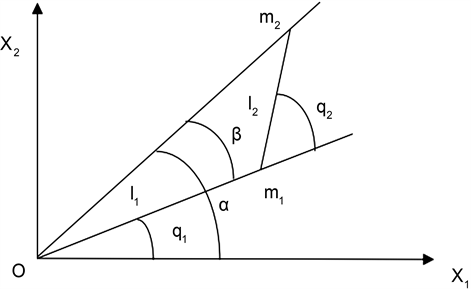
Figure 1. Two degree of freedom manipulator
图1. 二自由度机械臂
根据机械臂末端端点在工作空间中的位置求得关节角度
和
,由文献 [16] 中的计算方法可得图1的机械臂末端在工作空间中的位置为
(1)
则
(2)
定义x为机械臂在工作空间中的顶端位置向量,机械臂顶端位置向量x和机械臂的关节角度q之间的关系式为:
(3)
为机械臂顶端的Jacobian信息,
与
的关系式为:
(4)
将机械臂顶端接触障碍物收到的阻力定义为
,而
则是由位置误差决定的,其动力学表达形式为 [8] :
(5)
其中,
为接触位置的指令轨迹,
、
和
分别为质量,阻尼和刚度系数矩阵。
因为阻抗控制是应用于笛卡尔坐标系中,所以为了要让机械臂实际末端位置更接近理想位置,要将直角坐标系和笛卡尔坐标系进行转换,考虑到实际情况下,机械臂在未知工作环境中会受到外界干扰,设计如下机械臂数学模型 [9] :
(6)
式子中:
(7)
其中
,
式中:
为机械臂惯性矩阵;
为机械臂离心力和Coriolis矩阵;
为机械臂重力项向量;
为机械臂的雅可比矩阵;
为障碍物对机械臂末端造成的接触力;
为机械臂受到的干扰项,并假设
的范数有界。
3. 有限时间双幂次滑模控制器
将
设置为工作空间中的理想位置,
和
分别为理想的速度和加速度。
因此
(8)
式中的
设计为一个正定矩阵。
并将机械臂模型代入后,将控制器
设计为:
(9)
其中,c > 0,k > 0,a > 0,b > 0,α > 1。
将控制率带入式子(6)后得:
(10)
将
代入式子(10)得:
(11)
由于
是对称正定的,所以我们定义一个Lyapunov函数为:
(12)
同时由于
是一个斜对称矩阵,所以
即
,代入后得:
(13)
引理1 [10] :
如果对于一个非线性系统,实数
,
和
,并且李雅普诺夫函数满足:
(14)
该系统是实际有限时间稳定的,且在以下时间内达到稳定:
(15)
其中
。
式(13)中:
(16)
整理后得:
(17)
根据引理1的定义,系统是实际有限时间稳定的,并且收敛到以下区域:
(18)
4. 仿真验证
仿真对象为二关节机械臂,该机械臂的动力学方程为:
(19)
式中
(20)
上面公式中的
的数值由公式
得到
(21)
是机械臂的负载,
和
则分别是机械臂第一关节和第二关节的长度,P是机械臂本身的向量参数。机械臂实际参数
,
,
,给定机械臂一个跟踪轨迹,让机械臂在笛卡尔空间里跟踪该轨迹运动,取
,假设机械臂会绕一个半径为1的圈,中心点
。
在仿真中的机械臂跟踪指令轨迹时是工作空间里的直角坐标系,不是关节空间里的角坐标系,所以我们需要根据公式将工作空间里的机械臂的末端直角坐标系转换成关节角坐标系。
仿真中,假设
处有一个物体挡在机械臂原本设定的指令路径上,此时,当
未移动到1.0时,及机械手的末端还未接触到路径上的物体,此时的
为[0 0]T;当
移动到1.0时,此时
为1.0,物体的各项阻尼参数为:
,
,
,干扰项取
,滑模控制器取式(9),控制器增益为:
(22)
仿真结果如图2~6所示:
由图2和图3可以看出,本文提出的控制方法可以让机械臂精确的分别从X轴方向和Y轴两个方向上对给定理想轨迹进行跟踪,这个结果证明了本文的方法可以使机械臂进行有效的位置跟踪并且降低跟踪误差。图4则为机械臂在运动过程中末端顶点接触到障碍物时产生的接触力。图5为本文方法与对比方法在给定理想轨迹下对X的跟踪对比图,图6为图5中0.8 s至1.05 s的局部放大图。
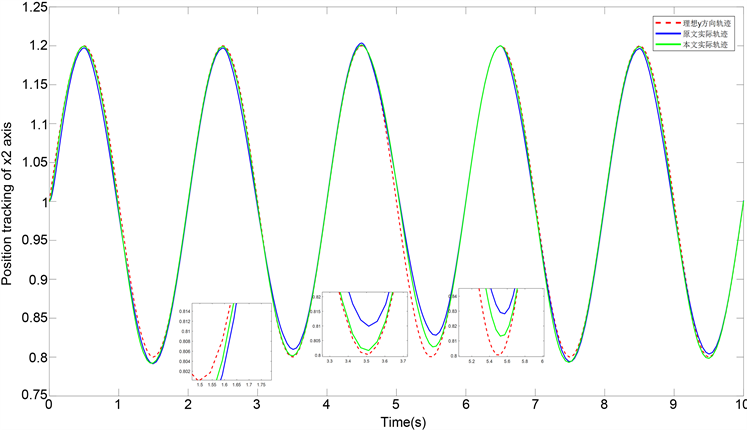
Figure 2. Position tracking on the X-axis of the end joint of the robotic arm
图2. 机械臂末端关节X轴上位置跟踪
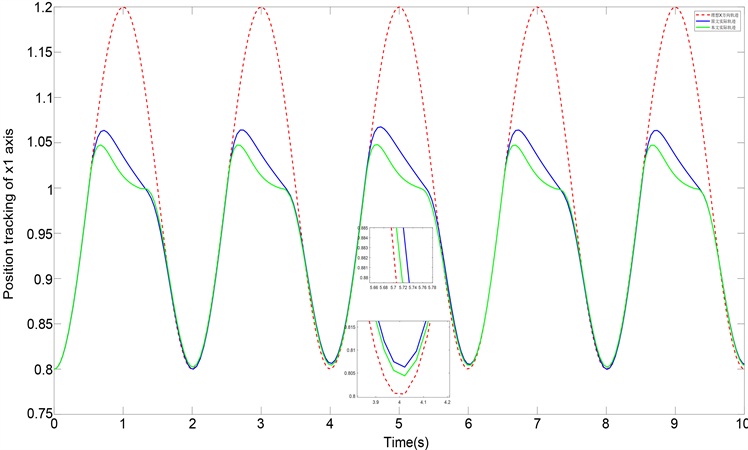
Figure 3. Position tracking on the Y-axis of the end joint of the robotic arm
图3. 机械臂末端关节Y轴上位置跟踪
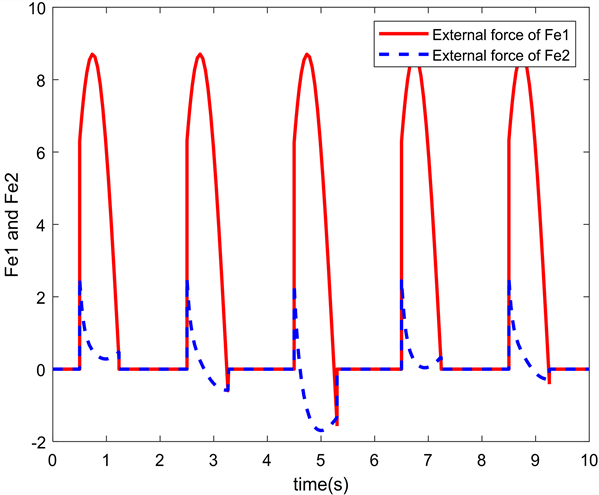
Figure 4. External force on the end of the robotic arm
图4. 机械臂末端所受外力
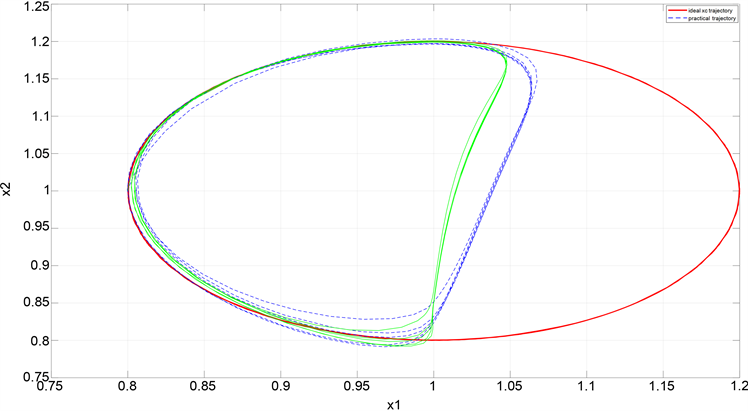
Figure 5. Comparison of trajectory tracking effects
图5. 轨迹跟踪效果对比图
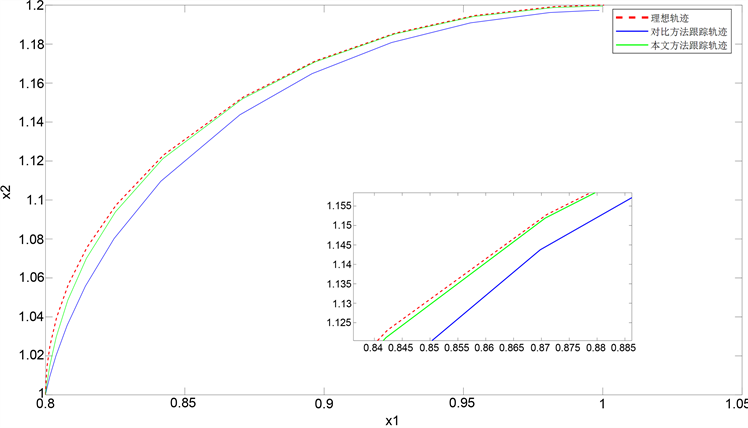
Figure 6. Contrast effect partial enlarged image
图6. 对比效果局部放大图
5. 结语
针对机械臂末端在日常工作和运行中遇到障碍物时的受困问题,本文提出了一种基于实际有限时间幂次滑模控制器,实现了机械臂对期望指定轨迹的有效跟踪控制,并使得机械臂在假设的约束工作空间里跟踪理想轨迹时的误差变小而系统响应速度变快。本文与对比方法相比可以明显看出本文方法所体现的跟踪效果更佳,将机械臂的运动轨迹约束在给定的区间之内,确保了机械臂在工作时的稳定性和安全性,本文所用方法可以有效提高控制精度,增强系统鲁棒性,减少系统收敛时间,使得机械臂在进行阻抗控制时可以更接近我们给定的理想轨迹。仿真实验的对比结果验证了本文所提及的方法的有效性。
基金项目
国家自然科学基金(61973167);教育部产学合作协同育人项目(22097110113736);盐城工学院校级科研项目(xjr2020041)。
参考文献
NOTES
*通讯作者。