1. 引言
相较于利用RTK纯靠外业打点编绘成图的传统测量方式,市面上现有的立采软件无法在内业阶段完成大部分屋檐改正的工作,且其成图精度难以保证;而当前三维裸眼采集模式前期建模时间长,在植被覆盖区域的地形要素难以精确表达 [1] 。
Pips测图云软件则规避了上述问题。在外业航摄时采用单镜头、高重叠度正射航飞方式,航线外扩较少,航飞效率高;像控点布设距离与倾斜建模相比,间距较远,可减少像控工作量;外业航飞时获取像片数量比倾斜摄影数量呈N倍减少,且内业只需空三加密,无需建模,节约了时间与硬件成本;通过高重叠度影像,在立体采集时,可由内业直接进行室内屋檐改正,减少外业调绘工作量,达到大范围快速更新大比例尺地形图的目的。
2. Pips空三云软件加密方案
2.1. 测区概况
醴陵市地处湖南省东部,位于东经113˚10'~113˚45',北纬27˚22'~27˚58',地貌以山地,丘陵和岗地为主。项目区位于醴陵市中心城区及周边,面积约为42平方公里。任务分布见略图1。
2.2. 产品精度与要求
2.2.1. 像片控制点精度指标
本项目像片控制点全部施测为平高点。像控测量采用基于HNCORS系统的网络RTK测量模式,无法使用HNCORS系统的区域使用GPS静态测量方法。高程采用湖南省似大地水准面精化模型获取。像片控制点平面位置中误差不应超过表1中的规定,高程中误差,不得大于测图基本等高距的1/10。
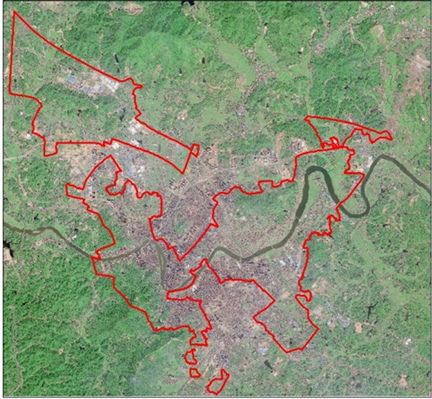
Figure 1. Outline of 1:500 topographic map updating range of Liling City
图1. 醴陵市1:500地形图更新范围略图

Table 1. Error index of plane position of image control point
表1. 像控点平面位置中误差指标
2.2.2. 地形图精度指标
为满足不动产变更调查需要,本次地形图平面精度指标参照地籍测绘相关要求执行。由于未进行权籍调查,无法准确界定界址点位置,对地形图点位进行以下分类并确定精度指标:一类点指明显房角点和院落外围围墙(栏栅)明显转折点,二类点指可用于权属界线划定的一般房角点、围墙(栏栅)转折点,三类点指一、二类点以外的其他地物点 [2] 。新测区域及修补测变化区域地形图平面精度指标按表2执行,修补测范围内未变化的地物点精度指标沿用原图精度。
Table 2. Topographic map plane accuracy index
表2. 地形图平面精度指标
城市建筑区和平坦地区高程注记点相对于邻近图根点的高程中误差为0.15 m,其它地区以插求点的高程中误差来衡量,高程精度按表3执行,林木隐蔽等困难地区,可放宽50%。
Table 3. Midheight error of contour interpolation point
表3. 地等高线插求点的高程中误差
2.3. 航摄分区划分与航摄情况
依据项目更新范围,结合实地情况,为满足不同地形、地物成图精度,在航摄时保证地面分辨率(GSD设计为0.02米)达到最优设计,将测区划分为20个航摄分区,航摄时按照航向重叠度不小于80%,旁向重叠度不小于70%,测区范围线外扩60米进行航摄,整个测区共获取航摄像片46,773张,各航摄分区划分见图2:

Figure 2. 1:500 topographic map updated aerial photo zoning map of Liling City
图2. 醴陵市1:500地形图更新航摄分区划分图
2.4. 像控点布设、测量情况
为满足1:500地形图更新项目设计要求,本次像控点布设以200米*200米方格网为单元,在每一个方格中布设一个像控点,点位间距尽量均匀分布 [3] 。像控点一般布设在地面有明显标志处,无标志区域采用铺设“L”形靶标,像控点测设时采用简易三脚架整平,利用HNCORS系统测定其坐标,通过在线转换获取高程值,所有像控点均按平高点测设。本测区更新面积40平方公里,共测设了1100根像控点,像控布点见图3。
2.5. Pips空三云软件加密生产流程
1) 在Pips空三云软件中按航摄分区导入影像数据,软件自动剔除无效区域影像,根据pos数据自动划分航带。
2) 全自动匹配加密点和自由网平差。
3) 导入外业像控点,软件自动预测位置,然后在立体中进行精确刺点。
4) 约束网平差,生成平差报告。
5) 根据平差报告,对控制点残差、检查点残差、连接点误差、公共点较差等进行分析,核实加密成果是否满足规范要求。

Figure 3. Image control point distribution sketch
图3. 像控点分布略图
3. 精度分析
3.1. 外业精度检测统计(按高精度统计)
外业检测时使用天宝GPS接收机,通过HNCORS系统测设图根点,再利用全站仪对碎步点进行检测。整个测区共检测各类型点1765个,详细情况见表4。
Table 4. Summary of field inspection of each aerial photography area
表4. 各航摄分区外业打点检测情况总表
3.2. 同名点像对差精度统计表(按同精度统计)
根据各航摄分区面积大小情况,每个加密分区均匀采集了数量不等的同名点组,每组同名点采集了三个像对,主要为同一航向采集两个像对,旁像采集一个像对,以此来判断像对点点位误差和高程误差。整个测区平面采集了327组同名点,合计981个平面点位;高程采集418组同名点,合计1254个高程点,详细情况见表5。
Table 5. Precision statistics table of point contrast difference with the same name
表5. 同名点像对差精度统计表
根据内外业精度检测和同名点像对差精度检测结果分析,若按照地籍测绘相关要求,居民地类平面位置精度有三个分区超限外,其余分区精度均满足相关规范要求。
4. 关键技术探讨
4.1. 技术优势
Pips空三加密软件支持网络集群模式,全自动任务分配。依据各节点工作状态,自动调度网络硬件资源,实现网络全自动化处理;远程控制网络机器,指定优先处理任务;在一个局域网内实现自由分组作业。
Pips空三加密软件支持GPS/RTK/PPK辅助平差技术可大幅有效减少外业控制点数量,实现大范围稀疏布控方案;1:500地形图免像控(局部范围);提高高程精度。
4.2. 问题及解决办法
问题:加密过程中存在自由网无法通过,有几点原因:
① 存在错误的连接点。
② 存在较多影像没有连接点,特别是成片的林区或水面。
③ 存在反胶或重叠度过大的情况。
④ 测区形状怪异。
解决方法:
① 删除错误的连接点。
② 删除没有3度航内连接点的影像,由于重叠度的原因不能删除超过连续三张影像。
③ 旋转影像。
④ 将形状不好的测区拆分成不同的加密分区。
5. 总结
测试结果表明,Pips软件为一种新型的立体测绘软件,无人机飞行效率高,航飞影像数据量少、空三加密后即可立体测图,有效减少项目周期及投入,产效率较高、精度高。对大范围的大比例尺(1:500)地形图数据进行更新时,居民地类精度虽无法全部达到地籍图精度要求,但能满足地形图精度要求。在实际的生产中,只要充分保证航飞航向和旁向重叠度,此种更新模式对地形图更新仍具有很大的意义。