1. 引言
近年来,绿色和环保理念在工业生产中的贯彻,推动了塑料在汽车制造、医疗、食品包装等领域的应用,而塑料自重轻的特点能够有效减轻车重,满足汽车制造行业轻量化的发展需求,达到汽车节能减排的目的 [1] ;但汽车部件的高性能要求是注塑塑料远不能满足的,故而塑料激光焊接具有焊接强度高、速度快、精度高、易实现空间曲线焊接、高自动化优势等特点,能够很好满足汽车部件对于气密度、清洁度以及焊缝美观度、光度的高需求 [2] 。
塑料激光焊接汽车零件的质量受激光功率、焊接速度、光斑直径、夹具压力等的影响;主要从夹具压力对焊接质量的影响进行研究分析,夹具的夹紧力过大或过小都会影响焊缝的质量,从而影响焊接工件的质量;故而对焊接压力的控制要求高度精确,而现有的伺服压力控制多采用传统的PID控制 [3] ,这导致控制系统对控制对象的适应性较差;针对这个问题,采用群智能优化算对PID参数进行优化,以提高控制的稳定性和鲁棒性。
大多复杂工程问题能够转变为求最优值的问题,但随着工程问题复杂度和计算量的提升,传统的算法远难适应,这时,智能算法的优异性能被诸多学者发掘,灰狼优化算法 [4] 是2014年提出的一种新型的群智能优化算法,它具有算法结构简单、参数少、收敛速度快和易实现等特点,现已被广泛引用于工程优化领域,与大多数群智能算法一样,它在求解复杂问题时存在种群多样性不足、开发与勘探不平衡、收敛精度低以及过早收敛等问题。
近年来一系列关于灰狼优化算法的改进方法相继被提出;首先,针对群智能算法初始化种群中个体的随机生成特质,往往基于混沌映射 [5] 、反向学习 [6] 以及莱维飞行 [7] 等策略改进算法优化和收敛性能,实现全局勘探与局部开采能力的提升,其次,对收敛因子a的修正几乎都是将其修改为非参数收敛因子,例如:指数衰减函数 [8] 、对数衰减函数 [9] 等;最后,在位置更新策略方面,龙文等 [6] 受差分进化思想启发对灰狼位置进行改进以平衡算法的全局勘探和局部开采能力;张铸等 [10] 引入正态云模型更新灰狼位置,提高了算法跳出局部最优解的能力,增强了算法优化性能。
以上研究各有所长,且为后面的进一步改进奠定了坚实的基础,而事实上没有任何一种算法能够解决所有领域所有类型的优化问题,故而为探索灰狼算法更好的性能,提出一种融合多策略的增强型改进灰狼算法EIGWO (Enhanced Improved Grey Wolf Optimization),首先,提出一种基于维度学习的狩猎搜索策略(DLH),用不同方法为每只狼构建一个可以共享信息的邻居,以此增加种群的多样性;其次,提出一种非线性的收敛策略来平衡勘探和开发,并通过修正参数A和C来模拟狼群狩猎时头狼和次头狼的交替行为;最后,对动态位置更新方程进行修正,保持种群多样性同时避免过早收敛。基于CEC测试函数中的8组测试函数进行实验,实验结果验证了改进策略的有效性,改进后的算法在收敛速度和收敛精度上有显著的提升,将其应用于塑料激光焊接PID压力控制参数优化中,系统的稳定性和适应性明显增强。
2. 塑料激光焊接原理
目前最常用的塑料激光焊接方式为激光透射焊接。焊接要求其工件材料为热塑性塑料,焊接时,通常要求上层为透光材料,下层为吸光材料,激光能够通过上层材料被下层材料吸收使得工件熔化,并在一定压力的作用下使得两个工件连接在一起 [11] ,焊接原理图及焊缝形成过程如图1所示。
3. 压力控制系统
塑料激光焊接的压力控制 [12] [13] [14] 是由伺服电机和行星减速机相连,通过电缸与滚珠丝杠的连接结合压力传感器进行控制;将伺服电机和行星减速器模型等效为二阶惯性环节,其他机械结构等效为一阶惯性加滞后的环节。

Figure 1. Welding schematic diagram and weld formation process
图1. 焊接原理图及焊缝形成过程
模拟电动机转矩控制方式控制交流伺服电机,其电压平衡式为:
(1)
其中Uq表示电动机电压(V),L表示定子的电感(H),iq表示电动机的电枢电流(A),ke表示反电动势常数,ω表示电动转子角速度(W)。
电机轴上的转矩平衡方程为:
(2)
(3)
其中T表示电动机的输出转矩(N.M),表示转矩增益系数,为负载转矩,B表示粘性阻尼系数,J表示电机轴上的转动惯量。
对以上公式进行拉式变换得到输出与输入的比值,即为交流伺服电机的数学模型的传递函数:
(4)
其中L、R、Ke、KT、B分别为电动机电枢电感、电枢电阻、反电动势系数常数、转矩系数、等效到电机轴上阻尼系数。
驱动器驱动伺服电动缸运动,经压力传感器实时检测出压力,并进行反馈,载荷输出为:
(5)
k表示弹性系数;故压力控制系统的输入为电动机输出电压Uq(s),输出为载荷F(s),从而整个压力控制系统的数学模型为:
(6)
压力控制系统本身的复杂性,只是以实时压力与目标压力之间的误差作为反馈,显然不能够达到要求的精度,为了解决这些问题,通过采用群智能优化算法对控制系统进行优化,但原始灰狼算法存在收敛速度慢、易陷入局部最优等问题,故而对灰狼算法进行改进,提高控制算法的收敛性能和求解精度。
4. 灰狼算法及其改进
4.1. 灰狼算法
灰狼优化算法是受灰狼群体捕食行为启发提出的新型群智能优化算法。灰狼群体存在森严的等级制度,种群等级分为四级:领导α狼、副领导β狼、普通δ狼和底层ω狼。灰狼的这种等级制度在其集体狩猎时发挥了非常重要的作用,整个捕食过程在α狼的带领下完成,其狩猎主要分为跟踪、接近猎物;追逐、包围猎物;最后攻击、捕获猎物 [15] 。
4.1.1. 包围猎物
将狩猎过程中灰狼的围猎行为定义为:
(7)
(8)
式(7)表示个体与猎物间的距离,式(8)是灰狼的位置更新公式。
和
的计算公式如下:
(9)
(10)
其中,
表示收敛因子。
4.1.2. 狩猎
灰狼具有识别潜在猎物(最优解)位置的能力,搜索过程主要靠α,β和δ灰狼的指引来完成。灰狼个体跟踪猎物位置的数学模型描述如下:
(11)
其中,
,
,
分别表示α,β和δ与其他个体间的距离;
,
,
分别代表α,β和δ的当前位置;
,
,
是随机向量;
是当前灰狼的位置。
(12)
式(12)分别定义了狼群中ω个体朝α,β和δ前进的步长和方向。
4.1.3. 攻击
(13)
式(13)定义了ω的最终位置。
4.2. 灰狼算法改进
4.2.1. 引入非线性收敛因子并修正控制参数C
在模拟灰狼逼近猎物的过程中,参数
表示狼群接近(
)和远离(
)猎物的过程,而
的值随着线性收敛因子的减小而变化,原始的线性收敛因子
其勘探和开发比例为1:1,显然难以适应实际搜索过程的高度复杂性;故此引入一种非线性的收敛因子,如下:
(14)
其中t表示当前迭代数,m表示最大迭代次数,k为区间[0, 1]中的非线性调制参数,收敛因子的迭代曲线如图2所示,与原始的
相比,非线性的
在早期增大以探索更多的未知区域,后期减小来缩小搜索范围,达到增强前期全局勘探和后期的局部开发的目的。
灰狼优化算法的全局勘探能力主要取决于控制参数C,其值决定着灰狼群体靠近猎物的难易程度。基于自然界头狼和次头狼相互交替的规律,主要对α和δ狼的参数进行修正,修正后的公式为:
(15)
(16)
修正前后参数C在1000次迭代下的函数值如图3所示。

Figure 2. Convergence factors before and after modification
图2. 修改前后的收敛因子

Figure 3. Function value of parameter C before and after modification
图3. 修改前后的参数C的函数值
4.2.2. 修改位置更新方程
参数A和C修正后,位置公式修正为:
(17)
另外,为了在更新位置的过程中保持种群多样性并削弱优势狼群的影响,将位置更新方程修改如下:
(18)
(19)
其中,w1、w2和w3分别为α,β和δ狼的距离权重,其在迭代过程中的不断变化能够带来更多的信息,保持种群的多样性。
4.2.3. 引入基于维度学习的搜索策略
基于维度学习的搜索策略,狼的个体狩猎是通过向邻居学习获得;狼
的新位置的每一维由等式(22)计算得到,同时该个体狼被其不同的邻居以及种群中随机选出的狼学习;除了产生当前的候选位置
,在DLH搜索策略中还为狼
的新位置生成一个新的候选狼
;为此,计算当前位置
与其候选位置
之间的欧几里得距离得到
,公式如下:
(20)
然后,
的邻居
由关于
的等式21构造:
(21)
构造出的关于
的邻域由等式22进行多邻域学习,其中,第d维的
由从
中选出的第d维的随机邻居
与种群中选出的随机狼
计算得到:
(22)
因此,在选择与更新的阶段通过等式23比较两个候选人的适应度值来选择最优的候选:
(23)
选出的候选适应度值若小于
的适应度则更新,反之则保持不变。
4.2.4. EIGWO算法伪代码如下
5. 结果分析与应用
5.1. 实验环境及参数设置
操作系统为64位的Windows 10,CPU为Intel (R) Core (TM) i5-10210U CPU @ 1.60 GHz 2.11 GHz,内存为16 GB,实验平台为MATLAB2017b。
初始参数设置为:种群规模40、最大迭代次数1000、实验次数50;评价指标为均值(Mean)、标准差(Std)以及最优值(Best);对比算法为原始灰狼算法(GWO)、改进灰狼算法(IGWO)、莱维飞行灰狼算法(LGWO)以及粒子群算法(PSO)。
5.2. 多维度基准函数优化结果分析与对比
表1给出了5种算法EIGWO、GWO、IGWO、LGWO及PSO在不同维度下50次独立实验的运行结果的平均值、标准差及最优值对比分析。为了更好地对比5种算法的收敛性,选取两个单峰函数(F3和F4)以及两个多峰函数(F8和F9)的适应度进化曲线进行对比分析,如图4所示。
通过对表2结果进行分析,可知增强改进灰狼算法(EIGWO)相较于原始灰狼算法(GWO)和两种改进的灰狼算法以及粒子群算法(PSO)具有更好的收敛性能和稳定性,且随着测试函数维度的增加,其他算法收敛精度随之降低,而EIGWO的寻优效果明显优于两者,有着更好的收敛精度和稳定性,其全局探索能力和局部收敛性更好,收敛速度也相对更快。
1) 无论是在低维度还是高维度上,EIGWO在F1、F3以及F9上的寻优结果均达到了理论的最优值0,而在其他测试函数上的实验结果相较于其他算法也表现出更好的寻优性能;
2) 从测试函数在不同维度下的测试结果可以看到EIGWO的各项评价指标除F8之外均高出其他算法数个甚至于数百个数量级,而通过图4也可以看到,EIGWO的收敛速度更快;
3) 由表2的实验结果可知,随着维度的增加,EIGWO在各测试函数上的寻优结果未发生明显的变化,表现出了良好的寻优适用性,同时通过对比各算法在单峰、双峰函数上的寻优结果,可见EIGWO的全局勘探以及局部开采能力更强,且表现出更快的收敛速度。
综上可见,EIGWO相较于其他算法,不仅全局勘探和局部开采能力有所提升,而且实验结果显示,EIGWO在求解时表现出更好的可靠性和鲁棒性。

Table 2. 8 Comparison results under test functions
表2. 8组测试函数下的对比结果
5.3. EIGWO在PID压力优化控制上的应用
仿真基于MATLAB平台,数据来源于上海某塑料激光焊接设备公司,以此为基础通过参数辨识得到仿真系统参数如下:T1 = 0.9,T2 = 1.5,τ = 1,K = 0.6,故被控系统传递函数为:
(24)
利用原始算法及改进算法进行数值实验,得到优化适应度函数收敛曲线如图5所示。可以看到,EIGWO收敛性能更好,收敛速度也更快。当系统不受外部扰动影响时,其动态响应曲线如图6所示,其未加扰动前的性能评价如表3所示。
Table 3. Dynamic performance evaluation without disturbance
表3. 无扰动动态性能评价


Figure 4. Convergence curves of different algorithms in different dimensions
图4. 不同维度下不同算法的收敛曲线
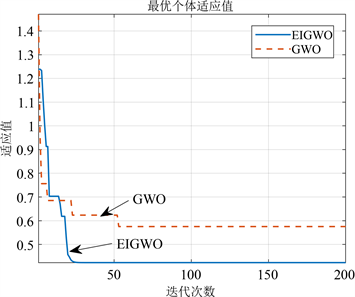
Figure 5. Convergence curves of EIGWO and GWO
图5. EIGWO和GWO的收敛曲线
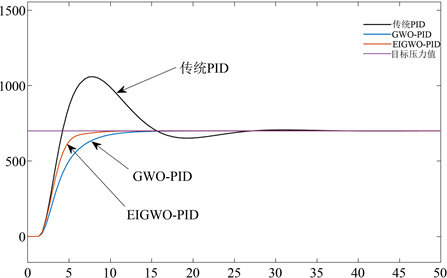
Figure 6. Disturbance-free dynamic response curve
图6. 无扰动动态响应曲线
通过比较分析可知,EIGWO和GWO优化PID均无超调,而EIGWO-PID在的调节时间、上升时间以及峰值时间均比GWO-PID短。分别在滞后时间常数不变、增加10%的滞后时间常数的情况下,在第50 s加入10%的扰动信号,其动态响应曲线如图7所示。
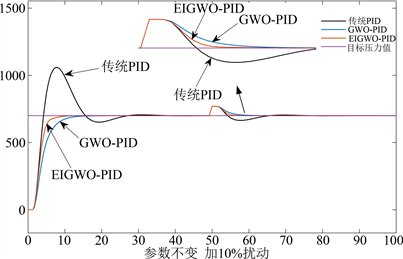

Figure 7. Dynamic response curve with constant lag time constant and 10% disturbance added
图7. 滞后时间常数不变、增加10%加入扰动的动态响应曲线
6. 结束语
针对灰狼优化算法求解多维复杂函数时存在的收敛速度慢、易陷入局部最优等问题,提出一种增强型改进灰狼优化算法(EIGWO);在该算法中,提出基于维度学习的狩猎搜索策略(DLH)以保持种群的多样性,通过非线性收敛策略和对参数A和C的修正来平衡全局勘探和局部开发,同时修改动态位置更新方程,保持种群多样性同时避免算法陷入早熟。通过基准测试函数下的数值实验以及PID参数优化中变参数和抗干扰测试实验,证明了EIGWO在求解多维复杂函数具有更好的收敛性能和收敛精度,在参数优化中也表现出更好的优化效果,且算法的适应性和鲁棒性也更好。