1. 引言
高难山地地震勘探施工,风险极高,测量是第一个进入工区作业的工序,它不仅担负着开路先锋的作用,还有为后道工序提供安全警示的责任。多年来,高难山地的测量工作主要借助遥感影像,采用人工现场踏勘的方式进行。无法预判的地形风险和寻找行进路线时产生的无效路程,严重影响了测量工序作业安全和施工效率。怎样解决这个问题,是我们多年来在一线作业中不断探索的问题。随着GIS技术在石油勘探的深入应用及推广,这个问题得到了相对圆满的解决。
2. 风险识别
2.1. 技术背景
地形是指地球硬表面由内外动力共同作用塑造而成的多种外貌形态 [1] 。以往,我们评估地形风险,仅限于对坡度的认识,而多年的野外地震勘探实践表明,单一坡度,不能正确表达地形风险程度,地形风险程度需要同时表达某点(片)相对准确的坡度和起伏度,经过多年持续研究,发现采用起伏度和两个不同方向坡度的平均值,形成约束条件,对地形进行分级,可以相对客观、全面的反应地形风险程度。
2.2. 风险分级
坡度和坡向作为描述地形特征的两个重要指标,能够间接表示地形的起伏形态和结构,一般在数字高程模型(DEM)上通过一定的计算模型计算得到 [2] [3] 。本文选取三阶不带权差分法计算地形坡度。若定义3 × 3的DEM网格编号(见图1),则有计算公式:
(1)
式(1)中,S为坡度,d为DEM的单元尺寸,d分别改为对应方向的dx和dy;
为中心点Z5周围各网格点的高程。
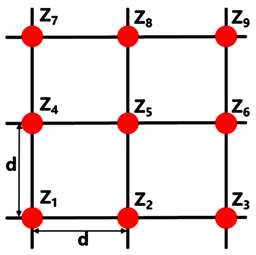
Figure 1. DEM 3 × 3 partial moving window
图1. DEM 3 × 3局部移动窗口
地形起伏度是定量描述地貌形态,宏观描述地形变化整体趋势的主要指标 [4] 。本文选取标准差法来衡量地形的起伏程度 [5] [6] [7] [8] [9] ,其计算公式为:
(2)
式(2)中,P是起伏度,以矩阵格式进行采样,采样间隔大于DEM数据原始采样间隔,Z1、Z2、
、Zn是计算起伏度矩阵各网格高程,m是n个采样点高程算数平均值。
经过多年研究,利用起伏度和坡度共同约束,将地形风险划分为六级。如表1是某区域地形风险分级约束条件,表中P为研究区域起伏度值,
为多向坡度平均值 [10] - [15] 。

Table 1. Terrain risk classification table
表1. 地形风险分级表
地形风险分级,需要根据不同地区形成不同约束条件,一般情况下分为植被茂密区和植被稀疏区,因为野外作业人员攀爬能量与借助外力成正比,植被茂密区借助植被攀爬能力相对强一些,植被稀疏区弱一些。图2是同一地区地形风险分级和单一方向坡度的比较,从中可以看出细节上的差别。
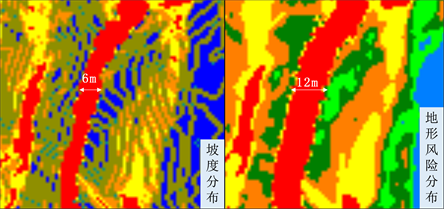
Figure 2. Comparison of slope and terrain risks in the same area
图2. 同一区域坡度与地形风险对比图
3. 行进线路规划
3.1. 测量工序行进线路规划及应用
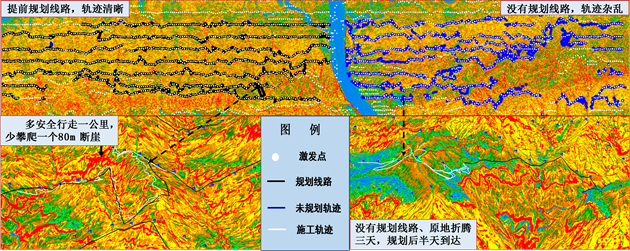
Figure 3. Comparison diagram of construction route
图3. 施工行进线路对比图
Table 2. Comparison table of construction mileage
表2. 施工行进里程对比表
施工行进线路规划,主要应用于无人区,因为这些地区没有路,现场寻找施工线路非常麻烦而且十分危险。提前规划施工线路,可以避免实际施工时因盲目寻找施工行进线路造成人员人身伤害,同时提高施工效率。在施工前,利用地形风险分级根据物理点部署情况,沿地形相对低风险段对施工行进线路进行规划,再利用DEM、DOM进行路演验证,大幅度减少高难山体施工中寻找线路时的风险。图3是某地区三维勘探时,施工行进线路规划情况,河流两边地形基本相当,西部是规划线路后的实际施工行进线路轨迹,东部是没有规划行进线路的实际行进轨迹,表2是该地区没有进行规划线路和规划行进对比结果,可以看出通过预先规划线路与没有规划线路相比,操作人员实际行进里程缩短35.74%。
3.2. 后道工序行进线路规划及应用
由于测量工序还有为后道工序提供安全警示的责任,所以在物理点放样的同时,测量人员还需利用GPS记录实际行进轨迹。通过进行轨迹整理,剔除重复路线,按照“排列工序重叠测量轨迹、钻井工序参考测量轨迹”的原则重新规划排列、钻井等后道工序行进线路,同时将规划好的线路与地形风险模型、物理点成果叠加形成施工行进避险文件。后道工序施工人员只需将此避险文件装入手机,沿整理后重新规划的线路施工,既可通过避免绕道提高施工效率,又可通过灵活选择施工作业与返回路线,最大限度的规避高风险地形带来的施工进行风险。
如图4,施工人员有1、2两条可以选择的道路,1号路线要经过4个极高风险区,2号线路只经过1个极高风险区,且大部分路段为中、低风险区(见图5、图6)。施工时必须到达物理点位,只能选择走1号线路。但施工完后返回,以前大多时候都是原路返回,现在可以直接从图上找到风险更低,效率更快的2号线路。
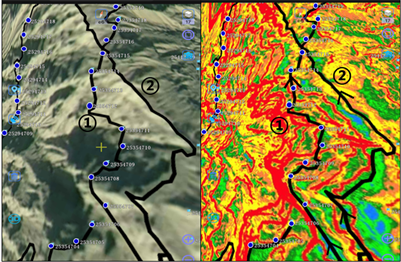
Figure 4. Route map (remote sensing image on the left and terrain risk map on the right)
图4. 行进线路图(左图为遥感影像图,右图为地形风险图)
4. 应用效果
4.1. 项目施工风险
塔里木盆地某高难山地三维项目,是该地区地形风险最大的区域,特别是南部高难山体区,地形切割较大,沟壑纵横交错,涉及接收点35,478个在极高风险区,测量和排列工序作业风险极大(见图7)。
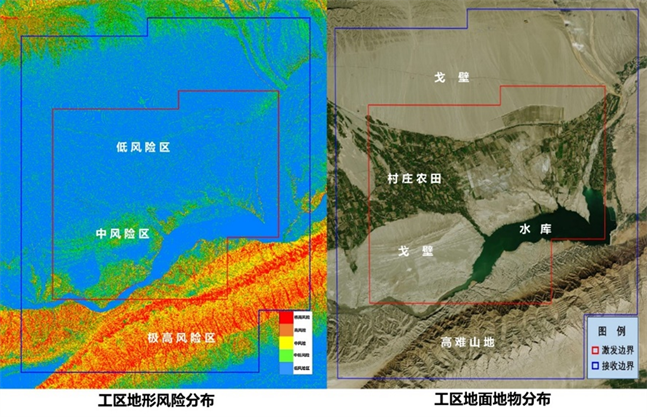
Figure 7. Topographic risk and feature distribution map of the work area
图7. 工区地形风险及地物分布图
4.2. 测量工序行进线路规划
针对南部高难山体区151条测线35,478个接收点,根据地形风险分级图,在室内预先选择施测线路,再把规划的行进线路和风险图、设计物理点导入手持机,用于实地放样(见图8)。20人62天共完成1050公里的物理点放样工作。规划进行线路与实际行进线路吻合率达90%。安全高效的完成了施工任务。为高难山地施工作业探索出了一套安全、高效、实用的技术方法,结束了人工现场摸索施工的工作模式。充分利用了测量施工轨迹,切实实现了前道工序为后道工序服务的施工理念。
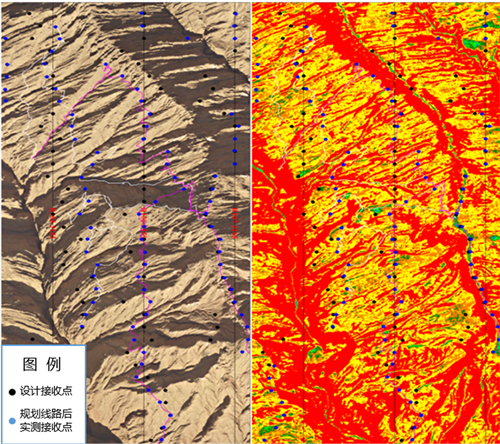
Figure 8. Planned route map (remote sensing image on the left and terrain risk map on the right)
图8. 规划行进线路图(左图为遥感影像,右图为地形风险图)
4.3. 排列工序行进线路规划应用
由于本项目炮点未上山,排列工序施工人员运用施工避险文件,在南部高难山体区完成了980公里的施工线路规划和35,478个单点检波器埋置。安全高效的完成了高难山地排列布设工作。如图9为局部排列埋置的路线图,左图为上山进行排列埋置的施工路线,右图白色路线为下山时的快捷路线。此方法大幅降低了排列埋置人员的施工风险,同时提高了施工效率。
5. 结论
本文基于地形风险分级,提出了在高难山地石油勘探采集作业测量工序施工中,提前规划行进线路及为后道工序提供规划线路支撑的技术方法。解决了多年来施工中无效行进路程较多的问题。并充分利用测量行进轨迹服务生产,践行了前道工序为后道工序服务的施工理念。
同时,该方法在实际生产应用中取得了较理想的效果,最大限度地规避了地形因素给施工人员及设备带来的安全隐患。降低了高难山地测量和后续施工安全风险,提高了施工效率,具有较大的推广应用价值。