1. 引言
三维激光扫描技术是近年来兴起的新型测绘技术,它通过高速激光扫描测量的方法,大面积、高分辨率地快速获取被测对象表面的三维坐标数据,实现了传统单点测量进化到面测量的技术突破,这些海量的空间点位坐标称为点云数据,该技术目前已经在各个领域进行了尝试、应用和探索,并在一些重大工程项目中起到关键性作用。
在建筑工程领域,点云数据转换为建筑图纸,包括平面、立面、剖面、总平面、细节大样等已经得到广泛推广,并成为现状测绘工作的重要技术支撑 [1] 。就目前矢量转化的手段和方式而言,大都采用将点云数据的一个面通过插件导入CAD软件中进行描绘,考虑到建筑物本身存在的不平整度、倾斜度和建成时已有的施工误差,即使人工描绘后产生细微误差,也会通过后期的统一调整进行“中和”,但在一些需要进行校对的工况下,描绘的方式显然不够严谨,需要有一个统一的、科学的矢量转换方法,以此为后续的校核比对工作提供可靠依据。
本文将以整体最小二乘法为线性拟合的计算方法,引入统计学的拟合优度及显著性检验对拟合成果进行校核,提出以Geomagic Control软件作为比对平台,通过某大型展馆X展厅的实测数据,论证上述成套拟合及比对方法的可行性,为后续的技术应用提供参考和借鉴。
2. 整体最小二乘法
整体最小二乘法是一种较为先进的最小二乘法结构,考虑线性方程组Ax = b,最小二乘法只考虑误差来自b,但是实际上误差也有可能来自A,整体最小二乘法在这一点上进行了优化考虑。目前整体最小二乘法已经广泛应用于信号处理、自动控制、系统科学、统计学、物理学、经济学、生物学和医学等多个领域中。
令A0和b0分别代表不可观测的无误差数据矩阵和无误差数据向量,实际观测的数据矩阵和数据向量分别为
,
。其中,E和e分别表示误差数据矩阵和误差数据向量。整体最小二乘法的基本思想是:不仅用校正向量Δb去干扰数据向量b,同时用校正矩阵ΔA去干扰数据矩阵A,以便对A和b二者内存在的误差或噪声进行联合补偿。
以抑制观测误差或噪声对矩阵方程求解的影响,从而实现有误差的矩阵方程求解向精确矩阵方程求解的转换:
目标期望校正数据矩阵和校正数据向量都尽可能小,因此总体最小二乘问题可以用约束优化问题表述为:
其中F表示Frobineous范数。
整体最小二乘法的求解过程主要为:根据线性数据首先列出n × m的矩阵,构建该矩阵的增广矩阵A,对矩阵A进行QR分解(将矩阵分解成一个正规正交矩阵Q与上三角形矩阵R)得到一个新的矩阵B,随后对矩阵B进行奇异值分解(将一个比较复杂的矩阵用三个子矩阵相乘来表示,即特征向量),分解实则是一个提取特征值的过程,以此得到直线待定系数的整体最小二乘解 [2] 。
3. 拟合成果检验
3.1. 拟合优度
拟合优度用来描述模型与实际数据之间的误差,它可以用来反映一个模型的优劣,当某一模型的拟合优度高时,它表明该模型可能在大多数情况下是符合实际的。拟合优度可用判定系数R2表示,R2反映回归直线的拟合程度,取值范围在[0, 1]之间,R2→1,说明回归线拟合程度越好;R2→0,说明回归线拟合程度越差。拟合优度的公式为:
对应:
其中总平方和(TSS)反映因变量的n个观察值与其均值的总离差,且可以分成回归平方和(ESS)和残差平方和(RSS)两部分,回归平方和(ESS)反映自变量x变化对因变量y取值变化的影响,残差平方和(RSS)则表示随机误差的效应。
拟合优度本质上是描述性的刻画,不涉及到对解释变量和被解释变量的总体关系的推断。对于不同的模型,不同的学科有着不同的惯性和标准,例如,在社会学中拟合优度差不多在0.3左右都是普遍的,对于时间序列拟合优度可以达到0.9以上,对于结构形状拟合优度则多在0.5左右,拟合优度不是普遍接近1的,太高的拟合优度反而会产生质疑,因此不能单纯的以拟合优度作为判断模型好坏的唯一标准。
3.2. 显著性检验
显著性检验就是事先对总体的参数或总体分布形式做出一个假设,然后利用样本信息来判断这个假设是否合理,即判断总体的真实情况与原假设是否显著地有差异。显著性检验的原理就是“小概率事件实际不可能性原理”来接受或否定假设。
显著性检验的步骤为:
1) 提出假设:H0:b1 = 0线性关系不显著;H1:b1 ¹ 0 线性关系显著。
2) 计算检验统计量F:
回归均方(MSR):回归平方和SSR除以相应的自由度(自变量的个数k)。
残差均方(MSE):残差平方和SSE除以相应的自由度(n – k − 1)。
将回归均方(MSR)同残差均方(MSE)加以比较,应用F检验来分析二者之间的差别是否显著。
3) 确定显著性水平a,并根据分子自由度1和分母自由度n − 2找出临界值Fa。
4) 作出决策:若F > Fa,拒绝H0,线性关系显著;若F < Fa,不能拒绝H0。
4. 比对平台选用
Geomagic Control是一款逆向工程对比分析平台,它结合一系列广泛的计量工具与科学的质检工作流程,用于实现三维检测领域的简单操作与直观全方位的质量控制,该软件在短时间内,即可实现三维扫描数据与原始数模之间进行比对检测分析、最佳拟合对齐、3D比对、颜色色谱注释、2D尺寸、GD&T和出具报告等,其快速、精确、信息丰富的报告和分析为三维检测提供强大的技术支撑 [3] 。
目前Geomagic Control主要应用在制造业的检测领域,主要应用点为:① 识别并解决制造与装配问题;② 消除成本高昂的报废和返工;③ 准确一致地评估损坏、变形或磨损;④ 在零件出现故障之前做出预测;⑤ 减少质量控制瓶颈等。考虑到该软件能够处理工业级别的零件偏差,因此其处理精度完全可以满足在建筑领域的比对使用,Geomagic Control的主要比对流程见图1所示。
5. 实例测试
房屋的建筑平面测绘及复核工作越来越多的出现在既有建筑检测、改造,新建建筑施工误差比对的领域中,并成为其中举足轻重的一环,传统的测绘方式如测距仪、全站仪,由于测量精度不够、布站环境受限、数据不够直观、测绘效率较低等原因无法满足建筑测绘成果的需要。采用三维激光扫描技术可以高效的采集高精度的三维点云,基于影像级的数据可以为测绘成果转换提供有力的技术支撑,但在后处理过程中,往往采用插件导入CAD进行人工描绘,这样的矢量转换方式显得不够严谨,同时导致了精度的损失。本次将以X展厅作为测试数据,采用整体最小二乘法进行线性拟合,实现可靠的点云数据矢量转换,从而完成与原设计尺寸的比对校核工作。
5.1. 数据处理
首先将X展厅单测站点云数据调取出来 [4] ,见图2所示,进行初步的去噪处理,将坐标系转正,随后在目标上选择合适的切点设置一个参考面,将参考面网格打开进行剖切,剖切厚度设置为1 mm,见图3所示,此时目标的矢量轮廓已经清晰可见,对四条边分别进行顺时针编号(L1~L4),并分别截取出来,将所有的直线导出为坐标合集的txt文件,并基于此进行下一步的拟合计算工作。
5.2. 拟合计算
点云数据的量级往往在几千至几十万,甚至上百万不等,再结合不同算法的转换会形成巨大的计算量。java则具有良好的性能表现,可以高效处理大规模的数据和复杂的计算,因此依托java平台,基于最小二乘法、整体最小二乘法的原理和计算思路,以实现点云数据的矢量转换为目的,编制拟合计算软件,软件的功能模块见图4所示。针对展馆轮廓特点,本次主要采用模块4——基于整体最小二乘法的点云直线拟合计算模块进行计算。
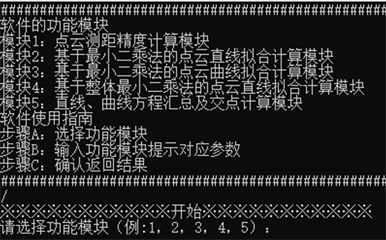
Figure 4. Point cloud linear fitting software function module
图4. 点云线性拟合软件功能模块
将截取的直线点云数据(txt)一一导入软件中,Z坐标自动删除,通过拟合计算得到各直线方程,随后选择软件中的模块5——直线、曲线方程汇总及交点计算模块,该模块可以调用上述线性拟合模块计算出的线性方程结果,通过自主选择,两两联立方程组求得交点坐标,输入CAD后完成平面轮廓线的绘制。L1线性拟合过程见图5所示,软件线性拟合计算结果详见表1。

Table 1. Summary of case linear fitting calculation results
表1. 案例线性拟合计算结果汇总
5.3. 成果检验
将拟合平面成果重新导入CAD中,通过插件打开点云数据,首先可以看出前后两者基本重合一致,见图6所示,随后进入统计学的检验环节。

Figure 6. Planar pseudo synthesis is matched with point cloud
图6. 平面拟合成果与点云匹配
拟合优度:根据原始点云坐标和拟合的线性方程,分别计算每一条直线的总平方和(TSS)、回归平方和(ESS)、残差平方和(RSS),通过拟合优度公式得到判定系数R²。
显著性检验:提出假设,H0:β1 = 0两个变量的线性关系不显著,H1:β1 ≠ 0两个变量的线性关系显著;通过检验统计量公式得到F,确定显著性水平a = 0.05,并根据分子自由度1和分母自由度n − 2查表找出对应临界值Fa。成果检验计算结果详见表2。
Table 2. Summary of results test calculation results
表2. 成果检验计算结果汇总
计算结果表明:在点云数据的矢量转换过程中,分别有61.3% (L1)、51.3% (L2)、50.4% (L3)、65.1% (L4)可以由点云数据与拟合直线的线性关系来解释,或者说,在点云数据的线性化过程中,有上述百分比是由拟合直线所决定的;此外,直线L1~L4的检验统计量F均远大于临界值Fɑ,因此拒绝H0的假设,认为线性关系高度显著。
5.4. 模型比对
分别以设计图尺寸和点云拟合轮廓建立展馆的STL模型,一起导入Geomagic Control软件中,设置一个模型为参考数据,另一个模型为测试数据,通过软件的最佳拟合对齐功能将参考数据与测试数据精确对齐,在使用中先勾选检查对称性、高精度拟合选项,再勾选只进行微调和自动消除偏差,后者可以反复应用几次,检查对齐的效果后进入比对环节。此外,对齐中如最佳拟合后还是不能有效匹配则根据形状特征改用N点、特征及RPS对齐功能进行拟合。
将两个模型首先进行3D比较,见图7所示,通过统计计算得出:展馆拟合和设计尺寸三维模型的偏差最大距离正值为104.8926 mm,偏差最大距离负值为-105.7135 mm,偏差平均距离为17.9955 mm,标准偏差为94.3829 mm,RMS估计值为96.0832 mm。在2D比较,即平面比对中,通过统计计算得出:展馆拟合轮廓和设计尺寸的偏差最大距离正值为13.7672 mm,偏差最大距离负值为−22.7566 mm,偏差平均距离为−4.4974 mm,标准偏差为14.1090 mm。随后可以通过2D注释把任意需要关注位置的偏差单独标注出来,供具体分析使用,见图8所示。
在完成所有要素分析和比对的工作后,可以使用软件的创建报告功能,导出报告支持各种类型的格式。在模板方面,报告可以根据需要进行设计和定制,包括定义报告的信息内容、模板样式、图表类型等等;在内容方面,报告会全面展示比对模型的多角度视图,除汇总上述3D、2D比较的统计数据外,还会更详细的体现偏差的百分比和分布等等。
6. 结论
1) 针对点云数据在建筑测绘中无科学矢量转换方式的现状,介绍了整体最小二乘法在线性拟合的原理和计算步骤,并引入统计学中的拟合优度和显著性检验加以复核。以某大型展馆中X展厅的点云为测试数据,基于上述理论进行计算和检验,结果表明成果具有较好的拟合效果,可为后续的比对工作提供支撑。
2) 提出以Geomagic Control软件为比对平台,将线性拟合后的平面轮廓与设计尺寸进行最佳拟合对齐、3D比较、2D比较等流程,实现全面及可靠的校核比对工作,基于软件的创建报告功能,可定制一套专业的交付报告模板。