1. 引言
插电式混合动力汽车通过多种动力源的组合,可以在不降低车辆动力性能的前提下降低油耗和减少排放。多能源动力系统的高效运行首先依赖于混合动力系统的合理匹配,而对匹配参数进一步优化也是提高整车性能的关键。
参数优化时,采用不同优化算法的优化效果和时间也有所不同。Li,Liang等针对插电式混合动力客车动力系统和控制参数同时优化的经济性和动力性平衡问题,提出了一种新的混合遗传算法提出了一种将增强遗传算法(EGA)与模拟退火算法(SA)相结合的混合遗传算法(HGA)。定义解的相对误差距离来表示标准遗传算法(SGA)、EGA和HGA的性能。在两个行驶循环中进行优化仿真结果表明,该算法具有较好的收敛速度和全局搜索能力 [1] 。Chen Yong等针对并联式混合动力汽车动力系统的发展,提出了参数匹配与优化方法 [2] 。根据插电式混合动力汽车的性能,确定了发动机、电机、传动系传动比和电池参数的优化范围,提出了基于分析目标级联(ATC)的两级优化问题。在系统层面,对整车燃油经济性进行优化,此时动力性为约束条件。优化后的参数级联到子系统作为优化目标,在子系统层面,最终的驱动和传动设计进行了优化,结果表明:燃油经济性有所提高,动力性能保持在原有水平。V. T. Long等采用蜜蜂算法(BA)对并联式混合动力汽车的关键部件尺寸和控制策略进行了优化。在满足约束条件下,根据BA调整关键部件尺寸和控制策略参数,使燃油消耗和排放的加权总和最小。结果表明,BA优化后可在不牺牲车辆性能的情况下降低油耗和排放。此外,BA能够定义具有高收敛速度的全局解 [3] 。
周云山等找出5个对经济性和排放性影响最大的参数,建立多目标优化模型,优化得到Pareto最优解集,结果表明,优化后百公里油耗降低25.3%,CO与HC排放分别降低35.5%,13.7% [4] 。高建平等针对优化速度较慢问题,建立了响应面近似模型作为优化时的替代模型,使用多岛遗传算法(MIGA)和序列二次规划算法(NLPQL)组合算法进行优化。结果表明:在维持动力性指标前提下,百公里油耗降低了7.20%,优化速度相比之前提高30倍 [5] 。屈俊凯等针对一种新型的行星混联式动力系统中的各组成部件进行了参数匹配与优化,优化结果表明,在车辆动力性变化不大的情况下,经济性提高了19.3% [6] 。余佳衡等针对BA与GA等算法优化周期长、寻优能力弱等缺陷,将包含精英策略的遗传算法和模拟退火算法相结合对动力系统部件参数进行优化,使节油率高达16.6%,且发动机工作点更多分布在高效区 [7] 。潘龙帅等针对标准循环工况下制定的能量管理策略不能达到经济性较优的问题,采集了真实工况块并构建了代表性的工况,结合工况对控制策略关键参数进行组合算法寻优,并在半实物仿真平台验证了此方法可以降低8.3%的油耗 [8] 。
以上优化大多针对控制策略参数或者传动系统参数进行单独优化,本文将在传动比优化的基础上,对DCT换挡规律进一步进行优化,来提升优化效果,并验证各参数之间优化效果的关联性。
2. PHEV模型与分析
根据所研究混合动力汽车特点,确定动力系统结构,并确定整车动力性能指标,以某PHEV为研究对象,采用双离合自动变速箱P2构型混合动力系统,结构如图1所示,工作模式共分为6种,分别为:纯电驱动模式、发动机启动模式、行车充电模式、发动机单独驱动模式、联合驱动模式及能量回收模式。
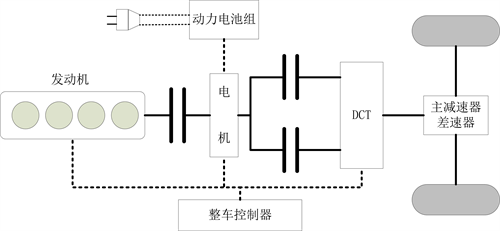
Figure 1. Power system structure of the vehicle
图1. 整车动力系统结构
3. DCT混动系统匹配与搭建
整车动力性能指标如表1所示。

Table 1. Vehicle dynamic performance index
表1. 整车动力性能指标
根据表1的动力性能指标进行整车及各系统的参数匹配,与传统燃油车相同,一般根据动力性指标对整车的需求功率进行计算,即最高车速、百公里加速时间及最大爬坡度。
3.1. 整车及动力源功率匹配
与传统燃油车相同,一般根据动力性指标对整车的需求功率进行计算,即最高车速、百公里加速时间及最大爬坡度。
1) 最高车速
在最高车速下功率平衡方程为:
(1)
式中,
为传动效率;
为风阻系数;
为混动模式下最高车速;f为滚动阻力系数;A为迎风面积。
2) 百公里加速时间
在已知加速时间和加速结束时刻车速情况下,实际车速可视为当前时间的函数:
(2)
式中,
为t时刻下实际车速;
为加速结束时刻车速;t为加速时间;x为拟合系数。
由汽车理论的知识可知,在加速阶段末时刻,整车需求功率最大,最大需求功率可以表示为:
(3)
式中,
为设计过程迭代步长;
为整车旋转质量换算系数。
3) 最大爬坡度
以最大爬坡度为标准,此时汽车功率平衡方程可以表示为:
(4)
式中,
为最大爬坡度下车速;
为当前坡度对应角度。考虑到汽车附件功率,汽车总功率可以计算得:
(5)
发动机与电机参数同样通过以上三个动力性指标进行匹配。
3.2. 动力电池参数匹配
动力电池的主要参数包括单体电池的电压、额定功率、额定电压及容量。通过纯电动模式下最高车速指标确定电池组的最大功率要求:
(6)
式中:
为电机和动力电池传递总效率;
为电池组最大功率;
为纯电动模式下整车需求功率。
电池容量通过纯电动模式下等速续航里程来确定,所消耗能量由公式(7)和(8)计算。
(7)
(8)
以上各式中:
代表纯电动模式下所需求的功率;
代表等速行驶的车速;
为电池组所含能量;
指传动系的总的传动效率;
指电池和电机传递效率;S为续航里程;SOCh代表电池的荷电状态上限值,SOCl代表电池的荷电状态下限值。
3.3. 传动系参数匹配
1) 最小传动比
最小传动比由传动系最高转速和最高车速确定:
(9)
式中,
为传动系最高转速,
为最大设计车速,r为车轮滚动半径。
2) 最大传动比
最大传动比由最大爬坡度和最大扭矩决定,此时传动比需要满足:
(10)
式中,m为整车质量;α为最大爬坡度;
为传动系统效率;
为电机最高扭矩。
3) 变速器速比约束
为了保证动力性和经济性,传动系各挡传动比采用带有约束的等比级数方法分配,其表述如下:
(11)
式中,ig1~ig6为DCT变速箱1挡到6挡的传动比,本文选取主减速器速比i0 = 4。
根据表1中整车参数,通过上述式(1)~式(11)匹配计算并联式混合动力汽车车动力系统主要参数,如表2和表3所示。
根据参数匹配结果,在Cruise软件在各模块输入参数,并进行总线连接,完成整车模型的搭建,如图2所示。
4. 参数优化分析
DCT混动汽车的传动系统参数以及换挡策略对于其动力经济两方面性能都有着很大的影响,虽然进行了参数匹配,但对于实际路况,还是可以对传动系统进行参数优化和换挡策略调整。本章采用多种优化算法进行优化并分析对比优化结果,以此来验证优化的准确性和可靠性。
4.1. 联合仿真验证
Avl Cruise软件可以用于车辆的动力性,燃油经济性以及排放性能的仿真,它可以计算并优化车辆的燃油经济性,排放性,动力性、加速能力、爬坡性能等。
4.1.1. 经济性仿真
WLTC循环是世界统一轻型汽车测试程序的一部分,发布于2016年,参考了全球多地的典型道路环境,具备瞬态特征,更加符合道路实际行驶状态。目前所有欧盟国家的新车都采用了WLTP测试标准,而且WLTC针对NEDC工况暴露的问题进行了优化,测试出的续航里程也更加接近现实使用情况。故本文选定WLTC工况进行经济性仿真验证。循环验证结果如图3所示。
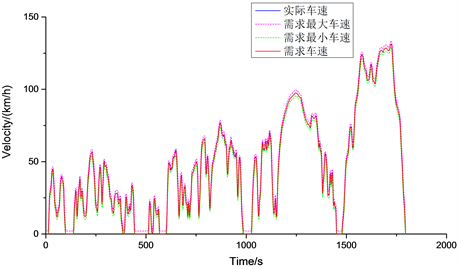
Figure 3. WLTC speed following curve
图3. WLTC工况速度跟随曲线
由图可知,实际车速始终处于需求最大车速与需求最小车速之间,与需求车速曲线基本吻合,且速度波动时与需求车速未产生较大误差,说明整车模型建立基本正确。
DCT混合动力汽车相比传统汽车,提高经济性的一个重要因素就是发动机工作点的控制与优化,在行驶过程中,发动机的工作点分布也反应了控制策略效果的好坏,图4为WLTC工况下,Cruise软件仿真后输出的发动机的工作点情况,其中区域颜色越深,代表此区域工作点越密集。从图中可以看出,深色区域大都集中在发动机较优工作曲线附近,经济性较好。

Figure 4. Engine operating point distribution
图4. 发动机工作点分布图
除了循环工况速度跟随和发动机工作点,电机的工作状态和电池SOC曲线也是控制策略性能的评价指标,如图5、图6分别为WLTC工况下电池SOC曲线和电机工作状态仿真结果。
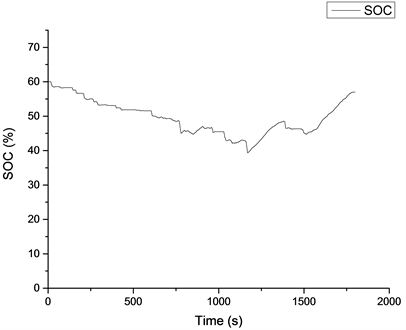
Figure 5. SOC curve of battery under WLTC condition
图5. WLTC工况电池SOC轨迹
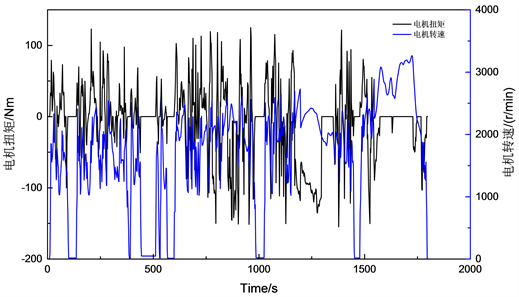
Figure 6. Motor operating curve under WLTC condition
图6. WLTC工况电机工作状态
由上图可知,电机转速与扭矩都维持在合理范围内,而电池SOC在设置范围内波动,包含了电池消耗模式和充电模式。
4.1.2. 动力性仿真
混合动力汽车动力性指标一般有爬坡度、百公里加速时间等,车辆加速曲线如图7所示。由曲线图可知,设计车辆加速曲线平滑,从零时刻加速到100 km/h所用时间为12.7 s,符合设计指标。
同样的,车辆爬坡度如图8所示,车速25 km/h下爬坡度在43%左右,满足设计指标中的爬坡度要求。
4.2. 基于Isight的传动系参数优化
Isight软件常用于求解各种优化问题,内部包含多种集成的优化算法,它与其他各大工程软件都有着相应的接口,使用时只需要修改制定的模型参数,并读取相应的结果文件,如此循环调用相应的软件,即可实现参数的迭代优化。
4.2.1. 优化对象
传动系的主要参数包括变速箱各档位传动比和换挡参数,在参数匹配过程中,选择以等比级数的方法制定各档位的传动比,虽然理论上能够使得发动机使得功率得到充分地利用,但是在实际路况中,并不能完全符合理论的利用率,而且车辆在各车速运行时间也有所不同,DCT混动汽车传动系参数优化是为了在满足动力性设计指标的基础之上,尽量改善经济性和排放性并尽量维持电池健康状态。所以为了能更大限度的利用发动机的效率提高燃油经济性,采用遗传算法对DCT各挡位传动比以及换挡参数进行多目标优化。由于涉及参数较多,首先进行传动比优化。取变速箱各档位的传动比作为设计变量,设计变量的表达式为:
(12)
式中i1~i6是变速箱各档传动比。
混合动力汽车是一个复杂、多自由度且高度非线性的系统,所以本文对于 DCT传动系统优化可以表述为有约束的非线性优化问题。数学模型为:
(13)
式中
为求解目标函数;
为非线性约束;m为非线性约束个数;
为优化变量;n为优化变量个数;
为第i个参数的下限,
为第i个参数的上限。
PHEV能量管理策略的优化目标就是在保证汽车行驶过程中动力性能的前提下,尽可能多地提高能量在传动系统中的综合流动效率,以此降低等效燃油消耗,同时也降低污染气体(CO, HC, NOx)的排放,故优化目标函数为:
(14)
式中
,
,
,
分别代表插电式混合动力汽车的百公里等效油耗和其对应的尾气排放量。
根据参数匹配要求,设定动力性约束条件:
最高车速约束:
(15)
最大爬坡度约束:
(16)
加速时间约束:
(17)
考虑主减速器承载与尺寸因素,主减速传动比约束:
(18)
4.2.2. Isight-Cruise联合仿真优化
本文选用Isight优化软件与Cruise软件联合仿真进行优化。Isight虽然与大部分工程仿真软件都有相应的接口文件,但由于Cruise发展较晚,所以Isight并没有集成与Cruise进行联合的仿真的专用模块,但是Isight具有一个通用模块simcode,通过编写含有Cruise软件执行程序和模型参数.prj文件路径的.bat文件,使得Isight软件可以调用Cruise软件进行仿真优化,并读取优化结果。利用该方法,也可以实现联合仿真,实现步骤如下:
1) 在.bat批处理文件中定义需调用Cruise软件执行路径,以及优化对象模型的.prj文件;
2) 在Isight软件中,设置输入文件为优化对象模型的.dbfi文件,并选取设定待优化参数;
3) 将Cruise的仿真结果文件result.log设置为Isight的读取输出文件,并定义优化对象;
4) 将完成的.bat批处理文件设置为Simcode的command模块,并设置模型文件夹为程序执行路径;
5) 在Optimization模块中进行相应优化算法的设置;
6) 运行优化程序,获取迭代过程和优化结果。联合仿真模型如图9所示。
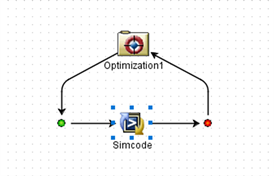
Figure 9. Isight Cruise co-simulation model
图9. Isight Cruise联合仿真模型
4.2.3. 优化算法
Isight中包含多种算法,其中NSGA-II算法,即带有精英保留策略的快速非支配多目标优化算法,是一种基于Pareto最优解的多目标优化算法。多岛遗传算法(Multi-Island GA)是对并行分布遗传算法的改进,适用于单变量函数的全局优化,设计具有比传统遗传算法更优良的全局求解能力和计算效率。两种算法优化流程图如图10所示。
4.2.4. 优化过程及结果分析
本文需要对于多目标进行优化,故选用这两种优化算法进行优化对比分析。在WLTC循环工况下进行寻优。由于篇幅问题,不再展示各有害气体排量寻优过程图。NSGA-II算法燃油消耗寻优过程如图11所示。从100次迭代开始寻优最低点集中在4.25 L/100 km左右,在209次迭代后得到燃油消耗最小值。
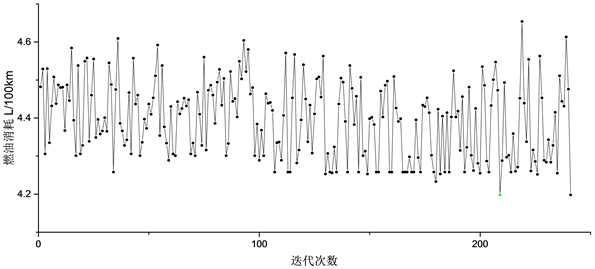
Figure 11. Fuel consumption optimization process of NSGA-II
图11. NSGA-II燃油消耗寻优过程
多岛遗传算法寻优过程如图12所示。从400次迭代开始寻优最低点集中在4.21 L/100 km左右,在939次迭代后得到燃油消耗最小值。两种算法其他有害气体排放最小值与燃油消耗最小值并不在一处,但相比油耗,排放性权重较低,故还是取燃油消耗最小对应传动比作为优化后传动比。
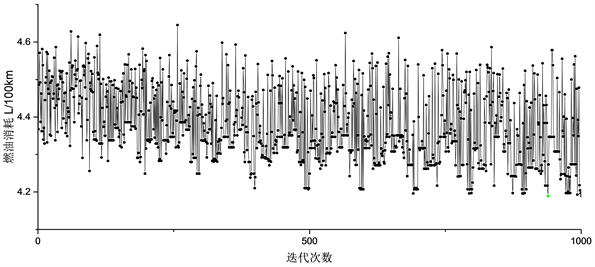
Figure 12. Fuel consumption optimization process of MIGA
图12. MIGA燃油消耗寻优过程
在WLTC循环工况下优化结果如表4、表5所示。根据图表可知:在保证车辆动力性的前提下,NSGA-II算法优化后的百公里油耗相比优化之前降低了4.98%,CO、NOx、HC排放分别降低了5.05%,3.92%,5.41%;多岛遗传算法优化后的百公里油耗相比优化前降低了5.18%,CO、NOx、HC排放分别降低了5.09%,3.58%,5.41%。
对比分析两种算法优化结果可知,两种优化算法优化优化结果接近,验证了优化算法的可靠性。遗传算法属于全局算法,有鉴于此,本文进一步使用局部优化算法进行组合优化,采用序列二次规划算法局部寻优与NSGA-II算法相结合的优化思路,联合仿真模型如图13所示。
Table 4. Transmission ratio optimization results
表4. 传动比优化结果
Table 5. Fuel consumption and emission optimization results
表5. 燃油经济性和排放性优化结果
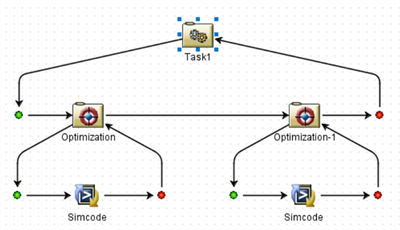
Figure 13. Model of combinatorial algorithm optimization
图13. 组合算法优化模型
优化结果如表6、表7所示。由图表可知,组合优化算法相比NSGA-II有着更好的优化效果,相比NSGA-II算法,可以进一步改善车辆燃油经济性与排放性。
Table 6. Transmission ratio optimization results
表6. 传动比优化结果
Table 7. Fuel consumption and emission optimization results
表7. 燃油经济性和排放性优化结果
图14、图15分别为WLTC工况下优化前后的电池SOC轨迹和燃油消耗对比结果。在保证提高燃油经济性和动力性的前提下,减小了电池SOC波动,降低了循环内电池放电深度,对电池寿命起到了一定的正面作用。
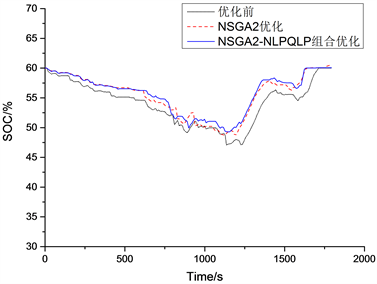
Figure 14. Comparison of SOC curves of battery before and after optimization
图14. 优化前后电池SOC轨迹对比
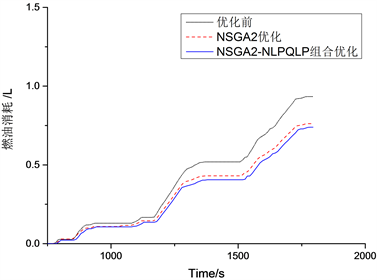
Figure 15. Comparison of fuel consumption curve before and after optimization
图15. 优化前后燃油消耗曲线对比
4.3. 换挡参数优化
上文已经提到,除了传动比对于排放性和经济性的影响,在实际路况下换挡 的时机和策略也会影响到车辆性能,同上述优化方式,在组合优化后传动比条件下分别对升档和降档换挡车速通过NSGA-II算法进行优化,换挡参数优化后,百公里油耗从4.176 L/100 km降低至4.129 L/100 km,优化前后换挡曲线对比结果如图16和图17所示。
经过两次多种优化,在保证动力性符合设计约束状态下,油耗从最初的4.418 L/100 km降低至4.129 L/100 km,降低了6.54%。除此之外,各种有害气体排放也都有所减少,电池SOC曲线波动情况也有改善。说明了优化设计方案的有效性。
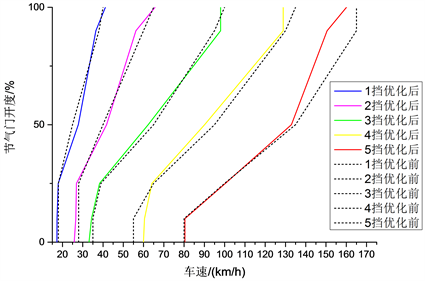
Figure 16. Comparison before and after optimization of upshift strategy
图16. 升挡规律优化前后对比
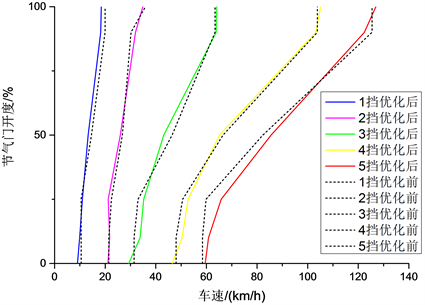
Figure 17. Comparison before and after optimization of downshift strategy
图17. 降挡规律优化前后对比
5. 总结
1) 根据整车参数和动力性指标,采用车辆动力学和经验公式对发动机等动力系统部件参数进行计算和初步匹配并完成动力性经济性仿真验证。针对传动系统参数对整车经济性与动力性的显著影响,以动力性为约束条件,分别采用多岛遗传算法(MIGA)和非支配排序遗传算法(NSGA-II)对传动比进行寻优,成功降低了燃油消耗和排放性,且两种算法优化结果相近。
2) 考虑到遗传算法为全局寻优算法,将二次序列规划算法(NLPQL)与非支配排序遗传算法相结合对传动比进行寻优,结果将燃油消耗从降低4.98%优化到降低5.47%,说明组合算法相比单遗传算法具有更好的寻优能力。
3) 进一步的,在组合优化传动比的基础上,对DCT换挡规律进行了优化,设计升挡与降挡车速作为优化对象,在保证动力性的前提下,最终将油耗降低了6.54%,说明在一定的传动比与工况下,换挡规律等参数的优化可以进一步提升车辆的经济性,对车辆参数优化时的对象选择具有一定的参考意义。
参考文献
NOTES
*第一作者。
#通讯作者。