1. 引言
随着全球能源需求的增加,光伏发电作为一种清洁能源得到了广泛的关注 [1] 。但是,由于光伏板长期暴露在室外,容易受到雨水、尘埃和脏污等因素的影响,导致光伏板表面积累大量的灰尘和污垢,影响了光伏发电效率 [2] [3] [4] [5] 。因此,对于光伏板的清洁非常必要。
现有清洁方式主要包括自然雨水清洁、自动喷淋清洁、人工清洁、车载设备清洁、光伏板清洁机器人清洁等。其中,自然雨水清洁虽然成本低但清洁力度不够,在污染和干旱地区不适用 [6] ;自动喷淋清洁效率高但需要大量用水,不适用于缺水地区 [7] ;人工清洁成本高且清洁质量不稳定,存在安全隐患 [8] ;车载设备清洁不适用于小型光伏电站且价格高昂 [9] 。光伏板清洁机器人效率高、安全可靠,对光伏板进行全面彻底的清洁,具有广阔应用前景 [10] [11] 。
目前光伏清洁机器人主要有三种路线:导轨式、小型便携式和挂板式。以以色列Ecoppia公司的Ecoppia E4机器人为代表导轨式清洁机器人 [12] ,通过专用导轨行走,适用于沙漠等沙尘较大的地区,此类机器人的问题在于需要铺设导轨,费用高昂且使用效率低。以Ecovacs Robotics公司设计制造的Raybot [13] 为代表小型便携式清洁机器人结构灵活,不需要复杂安装,但需要依靠吸附装置固定在光伏板表面上,存在难以跨越板间缝隙、板间高度差等问题,续航能力也较差。挂板式清洁机器人清洁效率高,适用于多种场景,如Washpanel [14] 、Ecopia T4等都可归为挂板式清洁机器人。挂板式光伏清洁机器人主要有清扫机构、行走机构、悬挂机构等组成,此类机器人的主要问题在于容易在运动过程中因上下端运动不协同而发生偏摆甚至卡死,而机器人上下驱动协同运动问题受到机器人与光伏板间的相互作用与机器人主体框架所带来的约束影响。本文针对挂板式光伏情节机器人结构,采用机理建模的方式,基于对上端悬挂装置的弹性形变分析给出机器人平移与旋转运动的完整描述,并通过研究机器人与光伏板间力和运动关系,建立了挂板式光伏清洁机器人动力学模型,并根据其数学模型提出机器人运动控制方案以保证机器人上下端的的协同运动,抑制偏摆问题,避免卡死的发生。
2. 机器人整体结构与运动学描述
挂板式光伏清洁机器人上下端各有一个箱体,其中上箱体内安装了滚刷电机和硬件控制系统,同时与悬挂装置和上端行走装置相连。下箱体则主要连接下端行走装置。滚刷通过上下箱体上的轴承座进行固定,并由上箱体内的电机进行驱动。
光伏清扫机器人可以简单地用图1所示的一般配置来描述。由于本文主要研究的是对机器人整体的运动控制,因此建模时忽略负责清扫的滚刷结构。机器人的运动部分主要由两根横梁、防偏架和两个直流无刷电机驱动的履带轮组成,由于机器人需要在倾斜的光伏板上运行,为此,设计一个包含一对弹性滚轮结构的防偏架,防偏架安装在机器人一侧,既能起到支承作用,也能够一定程度上防止机器人运动过程中出现过大的偏摆。
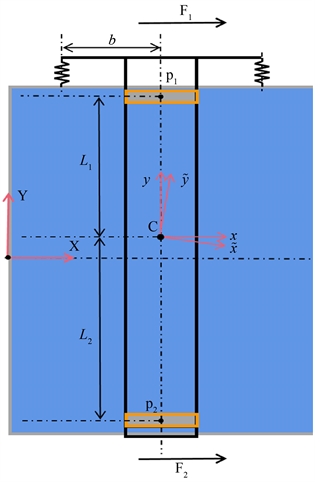
Figure 1. Simplified model of photovoltaic cleaning robot
图1. 光伏清扫机器人简化模型
设OXY为固定惯性坐标系,x轴平行于光伏板排列方向。设C点为整机器人的质心,令
为C处与OXY平行的移动坐标系,
为C处机器人的固定坐标系。点为轴与两履带轮中线的交点, 、
。机器人结构左右对称,防偏架上弹簧到机器人对称轴的投影距离为b。
、
。机器人结构左右对称,防偏架上弹簧到机器人对称轴的投影距离为b。
弹性滚轮结构可以简化为刚度系数为k的弹簧,机器人沿光伏板排列的x方向前进,两履带轮同步驱动时,防偏架上的两个弹簧轮沿y轴压缩相同的长度,此时防偏架仅对机器人起支撑作用,而当如图二所示,两履带轮不同步时机器人相对于光伏板发生偏转,由于弹簧位置始终与机器人保持一致,此时弹簧的压缩方向也将与机器人偏转相同的角度,这时两个弹簧的压缩长度将不再相同,会产生一个与车身偏转方向相反的弹性力矩和x,y两个方向的分力,如图2所示。
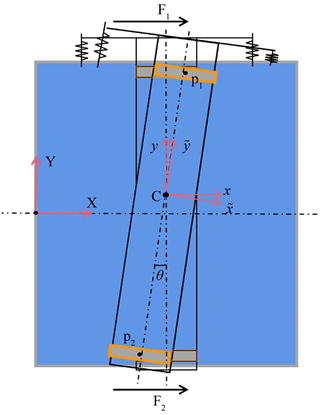
Figure 2. Linear and rotational motion model of robot
图2. 机器人的线性和旋转运动
图3描述了机器人偏转前后悬挂装置的几何关系的变化。

Figure 3. The geometric relationship of the hanging device before and after the deviation of the robot
图3. 机器人偏转前后悬挂装置的几何关系变化
根据图3,机器人偏转后的几何关系:
(1)
(2)
(3)
其中为两弹性滚轮在机器人未发生偏转时的长度,为机器人发生偏转时两个弹性滚轮的长度。
3. 动力学建模
根据上述定义,在固定坐标OXY中光伏清扫机器人的运动可以用以下三个广义坐标完全描述:C的两个位置坐标
和
,以及固定坐标系和
的旋转角度α,则系统的动力学方程为:
(4)
式中,M和I表示整个机器人的质量和围绕C点的转动惯量,
和
代表系统建模误差及其他干扰,
为机器人偏转时防偏架上两弹型滚轮被压缩后产生的弹力在 方向的分力,其表达式为:
(5)
其中φ为光伏板平面与水平地面间的夹角,g为重力加速度。
为履带轮的驱动力;
为履带轮和光伏板间的粘性摩擦和库仑摩擦的组合,其表达式为:
(6)
(7)
其中
和
是机器人驱动轮与光伏板间的粘性和库仑摩擦系数,
是用于近似符号函数
的连
续函数,如
,
为机器人转动时机身受到的摩擦力矩,其表达式为:
为机器人偏转时防偏架上两弹型滚轮变形量不同所产生的力矩,可以根据式(1)、(2)、(3)可以得到:
(8)
因此,由于机器人运动过程中的偏摆角θ非常小,因此
,
,
,则公式可近似为:
(9)
(10)
其中
,
,
。
由于公式(9)、(10)中存在各种变量之间的耦合关系,使挂板式光伏清洁机器人模型变得十分复杂。并且该模型是传统的非线性模型,这就使得系统的稳定性分析变得更为复杂,因此为了能更好地对模型进行分析和设计控制算法,本文暂时忽略非线性库伦摩擦力等的影响。可以将公式(9)、(10)做近似线性化处理:
(11)
(12)
得出上述基本模型后,还需要构建出标准的状态空间表达式,即系统的状态方程和输出方程,形式如下:
(13)
其中,x为状态向量,是系统的状态参数;u为输入向量,是系统的控制量;y为输出向量,是需要观测的参数;矩阵ABCD为系数矩阵,由系统的自身特性决定。
对于光伏清洁机器人,其系统的状态于x方向位移、x方向速度、偏摆角度和偏摆角速度有关,故系统的状态向量设置为
,观测对象和状态向量相同,
,系统运动状态与两行走装置的输入驱动力直接相关,所以选择控制量为驱动力,
。状态空间表达式变为:
(14)
其中
;
;
。
式中各项具体参数如表1所示。
4. 控制器设计
在前文中,我们已经推导出了挂板式光伏清洁机器人的线性化模型,并对模型系统的可控性和可观性进行了分析。接下来,我们需要利用状态反馈控制律来实现对其速度、位移和防偏摆的控制。在线性化模型的基础上,对于线性系统,我们可以选择PID、模糊PID、LQR等控制方法。考虑到控制器的设计难度和控制效果,本文决定采用线性二次型调节器(LQR)。
线性二次型调节器(LQR)是一种以较低成本对线性系统进行调节的控制策略 [15] ,具有较高的可靠性和鲁棒性。LQR控制属于最优控制问题,即给定初态和终态,在定义的问题空间内找到一个控制向量函数,使以状态变量和控制变量的二次型函数的积分为性能指标函数达到最优。与输出反馈不同,LQR控制是对系统内部状态进行反馈,因此能够反映更多的状态信息。
本文中只考虑连续时间的线性定常系统,文中所有假设和结论都基于连续时间线性时不变系统。设系统的状态方程为:
(15)
对于挂板式光伏清洁机器人系统,其控制目标为机身防止偏摆和直行运动,因此为其设计一个输出跟踪型的LQR控制器,将跟踪误差定义为:
(16)
为期望的轨迹。理论上我们期望机器人运行过程中能以速度v匀速运行的同时不发生偏转,因此
,控制目标是控制输入u使得
跟踪设计平滑参考轨迹
密切同时
保持尽可能小。
将式带入机器人动力学模型,令:
(17)
此时系统的性能目标函数J为:
(18)
式中的Q和R皆为正定对角矩阵,
,
,其中
分别表示为机器人质心C在x方向的位移跟踪误差,质心C在x方向的速度跟踪误差,机器人偏转的角度和角加速度所占的权重,越是被重视,希望它能够尽量小的误差分量所对应的
的数值就应该越大。加入
项的目的是对输入量进行约束,
的大小分别表示了对输入
的重视程度,
的越大则对相应输入
的限制越大。因此,在设计LQR控制器时,矩阵Q和R的选择决定了最终的控制效果。在选定好矩阵Q和R后,可直接利用matlab软件求得相应的反馈矩阵K:
(19)
进而可以得到:
(20)
利用MATLAB中的
求解控制算法中的反馈增益矩阵K,将表一中的参数带入状态空间表达式,可以得到:
;
。
结合Q、R矩阵实际意义和多次对比分析,最后选取
;
。
将A,B,Q,R代入方程,得到增益矩阵K:
5. 仿真验证
图4中4张图片分别表示在施加控制状态下的光伏清扫机器人x方向位移、x方向速度、偏摆角θ、偏摆角加速度的控制仿真结果。
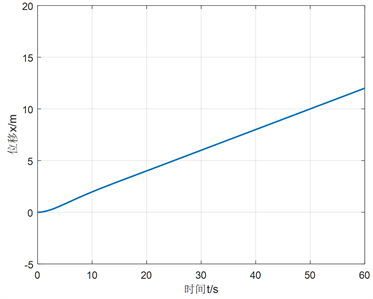 (a) 机器人x方向位移变化
(a) 机器人x方向位移变化 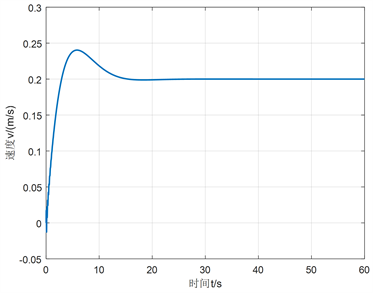 (b) 机器人x方向速度变化
(b) 机器人x方向速度变化 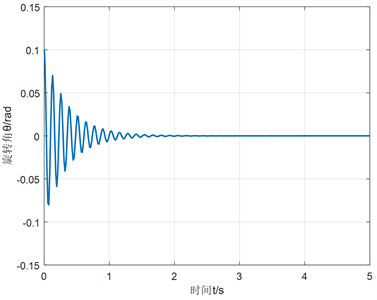 (c) 机器人偏转角度变化
(c) 机器人偏转角度变化 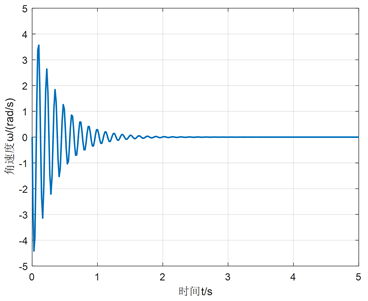 (d) 机器人偏转角速度变化
(d) 机器人偏转角速度变化
Figure 4. Simulation results of photovoltaic cleaning robot control scheme
图4. 光伏清扫机器人控制方案仿真结果
从图4可以看出,在本文提出的控制方法下,光伏清扫机器人可以在2秒内从0.1 rad的偏转角度快速回到平衡态,同时机器人的速度能快速到达到并保持在预设的0.2 m/s,相应的位移也满足匀速运动的要求,说明本次设计的控制方法有效。
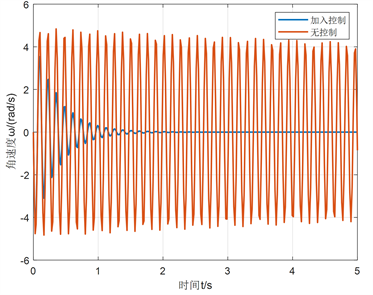
为进一步说明控制方法的有效性,对仅进行速度控制的仿真结果和在本文所设计的控制下的运行的仿真结果进行对比。
 (a) 机器人偏转角度变化对比
(a) 机器人偏转角度变化对比  (b) 机器人偏转角速度变化对比
(b) 机器人偏转角速度变化对比
Figure 5. Comparison of simulation results with and without control
图5. 施加控制与不施加控制仿真结果对比
如图5所示,在不施加控制的情况下,仅凭防偏架本身的作用很难在短时间内实现旋转角的收敛,机器人将来回摆动无法稳定运行。因此本文提出的防偏摆控制方案对保证机器人稳定运行具有重要意义。
6. 结论
本文针对挂板式光伏机器人运行过程中可能出现的偏摆卡死问题,对机器人的运动控制方案进行研究。通过对挂板式光伏清洁机器人的运动分析,给出了机器人平移与旋转运动的完整描述,并研究了机器人与光伏板间的力和运动关系,建立了挂板式光伏清洁机器人动力学模型。基于所建立的运动学模型,提出了一种基于LQR控制基本理论的机器人控制方案。最后在MATLAB simulink模块中对模型和控制器进行了仿真研究。仿真结果表明,所提出的控制方案可以在较短时间内快速的纠正机身的偏摆,可以保证挂板式光伏清洁机器人的稳定运行。
参考文献