1. 引言
由于各种噪声波干扰,使得反射声波信号经常淹没在所测数据中,造成难以辨认或根本无法辨认的情况。在声波信号的处理方法上,国内外很多学者注重了利用接箍反射波获取声波速度的研究,提出了短时自相关函数(ACF) [1] 、短时平均幅度差函数(AMDF) [2] 、人工神经网络等方法来研究接箍反射波的周期 [3] ,进而计算声波在油套环空中的传播速度,得到了较好的效果。例如吴新杰等 [4] 利用了神经网络的可训练识别的特点对信号进行处理,把在套管环空中传播的理想声波反射信号作为输入样本来训练神经网络,训练完成后把用回声仪实际测试到的反射声波信号输入到已经训练好的神经网络中,对接箍反射声波进行识别,可以从受到各种噪声影响的接箍反射波中识别出在接箍处反射声波的位置。
对液面反射波的辨识和处理是获取动液面深度的另一个重要的内容,但在这方面的研究较少,主要有张朝晖等 [5] 研究的对液面反射波采用的低通椭圆滤波器滤波的方法,吴新杰等 [6] 研究的分形模糊控制滤波的方法等。这些学者根据分形理论,利用模糊控制滤波方法,在确定分形维数之后,对分形模糊控制的参数进行调整,利用自回归过滤对信号进行滤波处理,能够得到好的滤除效果。
在动液面测试信号的自动辨识方面,王雄等 [7] 根据液面反射曲线的特点,将幅度宽度积最大的点作为特征脉冲利用计算机进行自动识别,可以避免人工解释的影响,提高识别能力。
总之,对声波法测动液面信号辨识技术虽然取得了一定的进展,能够对一些受到噪声干扰的反射声波信号进行辨识和处理,但在实际应用中不同井因状况不同处理结果会有所不同,特别是对液面反射波的辨识和处理效果不够理想。尤其在作业的过程中,各种环境噪声的情况更加复杂,环境与大气时常处于连通状态,大大减弱了有效的声波信号。目前在这种情况下对液面的测试和诊断无论是国内还是国外都是一个空白。
为此,笔者在现有回声仪的基础上,增加小型空压机、气体含量分析仪、自动补液装置等设备,有针对性的改进测试工艺和仪器,研制出一套适应低套压生产井的动液面测试工艺和测试设备;设备采用液面波自动识别技术进行液面波识别和液面深度计算,解决了现有技术无法持续监测井下动液面的问题。
2. 连续发声装置研制
2.1. 自动回声枪
自动回声枪的性能直接决定了系统的性能,是系统的关键部分。影响自动回声枪性能有两个方面:一是枪体结构设计,好的设计能让反射波刚好集中在微音器上,起到放大的作用;二是腔体的谐振频率和品质因素需要良好,不能和反射波形产生抵消作用。这些都需要有经验的设计人员和专业的软件去检测修正。
设计的自动回声枪主要由气室,电磁阀,微音器,枪体,井口连接器等组成。如图1所示。

Figure 1. Structure of automatic echo gun
图1. 自动回声枪结构图
2.2. 连续高压制氮装置
在修井过程中,因处于停产状态,作业前也已将套压放空。故只能采取对井下瞬时释放高压气体的方法来获取冲击波进行测量。同时,考虑到易燃易爆等安全的问题,故采取高压氮气来实现。
在常规的液面测试中,最为经常使用的气源是手提式4升容量的小型氮气瓶。但因容量有限,基本上只能放约30多枪就用完,不能满足修井过程中连续放枪的需求。而大容量气瓶因为重量太大及也需换气的原因,使用起来不太方便。故需要进行小型连续高压制氮装置的研制。
采用小型30升容量的静音型无油空压机作为气源,为后续处理装置提供压力约为0.6~0.8 MPa的压缩空气,基本上可满足测试工作对氮气量的需求。其中设有3个除油除水过滤器,净化压缩空气以满足分子筛的要求。
3. 液面波自动识别技术研究
声波在传播时不断衰减,受环空背景噪声的干扰,液面波与背景噪声的幅值比较并不明显,这些背景噪声将液面波掩盖起来使其不容易辨识。
但通过分析,可以知道液面反射波具有这些特点:
1) 液面波在曲线上是一个突起的值,具有比临近点较大的幅值,也即此处的能量较大。
2) 液面波主要为低频信号,通常在一段短的时间内通过零电平的次数较低,具有较低的短时过零率。
本研究中采用的液面波计算液面深度公式 [8] 为:
(1)
式中:L为液面深度,m;v为声波传播速度,m/s;T1为声波从井口到液面再返回到井口所需要的时间,s;N1为液面波短时幅值通过零电平的次数;fs为声波低频频率,Hz。
由此可建立液面波自动识别程序流程,如图2所示。
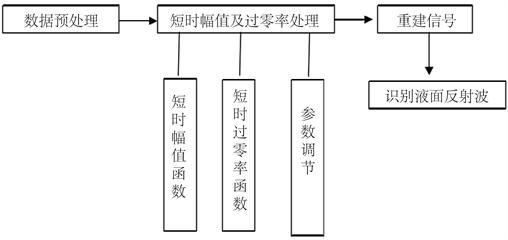
Figure 2. Flow chart of automatic identification program
图2. 自动识别程序流程图
当信号相邻的两个采样点的数值符号不同时,这个信号此时的状态被称为过零。
短时过零率函数为在截断的较短时间窗口内信号幅值数值符号改变的次数之和 [9] ,公式为:
(2)
式中:Zm为液面波短时平均过零率;xm(n)为第n帧语言信号;
为帧长;sgn(∙)为符号函数。
短时幅值函数主要体现了信号在一段时间内的幅值情况,或者说能量情况,公式 [10] 为:
(3)
式中:Km为液面波短时幅值;f(Sm)为短时幅度函数;f(Zm)短时过零率函数。
综合二者,即可体现幅值又可表明随时间变化的特性。由于需要进行短时分析,信号经过了矩形窗口的截断处理,变换后得到的信号能够较容易地看出液面反射波的位置,便于计算机识别。由于液面波幅值最大,可利用阈值限定的方法识别。如图3所示。
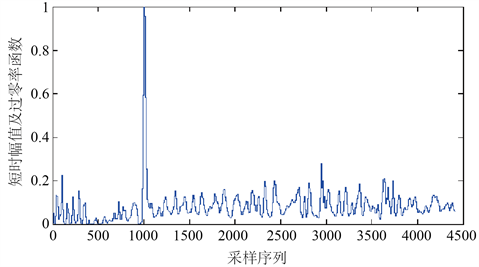
Figure 3. Liquid level wave transformation processing
图3. 液面波变换处理
4. 井下气体音速校准数学模型建立
油套环形空间对声速有影响的4个主要因素是:压力、温度、密度、比热比。它们均可测量计算出来,建立声速与深度–压力–温度–密度的计算公式及数学模型 [11] 。
精确的声速计算公式为:
(4)
式中:v为油套环形空间的声波速度,m/s;T井筒介质温度,℃;γ为井筒气体比热比,1;P为井筒压力,MPa;ρ为井筒介质密度,kg/m3。
井筒气温公式为:
T = 0.036h + 14 (5)
式中:h为液面深度,m。
井筒气体比热比(但在计算中可把它当定值)公式为:
(6)
式中:γ为井筒混合气体的总比热比,1;
为气体各组分体积分数,1;
为气体各组分的比热比,1。
井筒压力公式为:
(7)
式中:P0为井口气体压力,MPa;n为气体物质的量,mol;R为气体常数,若压强、温度和体积都采用国际单位制(SI),则R = 8.314(Pa∙m3)/(mol∙K);D为套管内径,cm;d为油管内径,cm;h为液面高度,cm;t为气体绝对温度,K;t0为液面处套管气温度,℃;t1为井口套管气温度,℃。
井筒气体密度公式为:
(8)
式中:p为任意井深下气体的压力,MPa;M为混合气气体的摩尔质量,kg/mol;
将式(5) (6) (7) (8)代入式(4),最终得到所需要的精确声速数学模型:
该公式将影响声速的其它变量都转化为容易检测的混合气成分值。在测量前,通过气体含量分析仪测出井口气组分浓度后,声速由系统软件自动计算生成。该公式可精确纠正温度、压力、井口气成分变化所带来的声速变化。
5. 自适应井下动液面实时监测装置设置
研制的装置主要由空压机、精密气体过滤器、控制主机、自动回声枪、自动补液装置及井口连接器组成。各组成部分及工作示意图如图4所示。
这种自适应井下动液面实时监测装置的特征主要体现在井口连接装置–井口树(1)、监控装置–集成控制主机(2)以及气体压缩装置–空压机(3)上。其中:井口连接装置(1)内部设有一端未封闭的第1腔室(101),还设有分别与第1腔室(101)连通的进气接口(102)及出气接口(103),可见第1腔室(101)能够与井口套管的内部空腔连通。监控装置(2)包括微音器(201)以及控制器(202),微音器(201)固定于井口连接装置(1)上且处于第1腔室(101)中;微音器(201)以及气体压缩装置(3)分别与控制器(202)连接。气体压缩装置(3)的输出端与进气接口(102)连接,输入端与出气接口(103)连接,当井口连接装置(1)与井口套管连接时,气体压缩装置(3)能够经出气接口(103)从第1腔室(101)中抽取气体,并压缩为高压气体,并将高压气体经进气接口(102)释放到所述第1腔室(101)。如图5所示。
通过上述设置,可解决现有技术无法持续监测井下动液面深度以及存在安全隐患、测试人员工作量大的问题 [12] 。

Figure 4. Schematic diagram of automatic liquid level monitoring
图4. 自动液面监测工作示意图
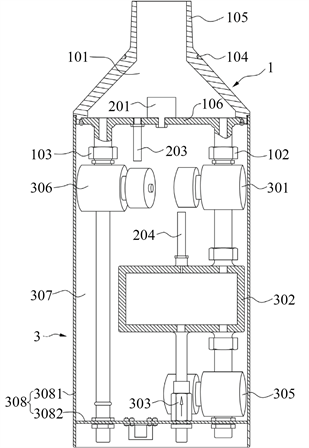
Figure 5. Schematic diagram of real-time monitoring of downhole dynamic fluid level realized by wellhead connection device
图5. 井口连接装置实现井下动液面实时监测示意图
6. 关键技术与创新点
6.1. 关键技术
1) 低套压井动液面测试工艺技术
经过大量的现场试验和调查分析,在现有回声仪的基础上,增加小型空压机、气体含量分析仪、自动补液装置等设备,有针对性的改进测试工艺和仪器。
2) 音速补偿校准技术
声波的传播速度受到介质的温度、压力、密度、比热比4个因素的影响,通过对这些影响因素的分析,建立音速补偿校准模型,修正音速。
3) 液面波自动识别技术
通过数据预处理、短时幅值过零率函数,重构函数,建立液面波自动识别模型,实现液面自动计算。
6.2. 创新点
1) 低套压井动液面测试工艺技术填补了胜利油田目前修井作业液面变化数据无法取得的空白,实现对修井前后液面位置情况的准确掌握。
2) 精确声速积分法开创了油井液面测量的新思路,具有精度高、应用范围广的特点。