1. 引言
减速板也叫阻力板,是一种增大飞机气动阻力的装置。着陆时打开减速板,由液压作动力使减速板开启一个角度,增加飞机的迎风面积并破坏飞机流线形,对空气形成增阻和扰流的作用,使飞机骤然减速。同时也可减小机翼的升力,增加机轮对地面的压力,从而增加机轮对地面的摩擦力,缩短滑跑距离。
减速板手柄(见图1)自动伸出有三种情形:一是着陆时,减速板手柄处于预位(ARMED),起落架支柱压缩模拟信号触发,两推力手柄收到慢车(IDLE),减速板手柄将从ARM位移动到升起(UP)位;二是飞机着落或中断起飞时,飞机速度大于每小时60海里,两推力手柄收到慢车(IDLE),反推手柄到位后拉起反推手柄,减速板手柄自动移动到升起位(UP);三是飞机在中断起飞或着落后,减速板手柄自动伸出的情况下,前推任一推力手柄,减速板手柄将自动回到放下位(DOWN)。
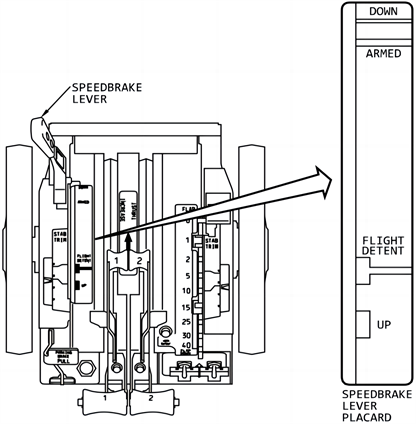
Figure 1. Position identification of speed brake handle
图1. 减速板手柄位置标识
减速板手柄无法自动伸出将直接影响到飞行员的训练 [1] 的真实性,为了能够实时监控速度制动作动器的工作状态,我们在速度作动器处添加一个电流传感器,将测得的电流情况过互联网传输到云服务器中,再将数据实时显示在WEB监控平台,同时当超出工作电流范围时通过实时通讯软件推送给一线维护人员。
2. 自动减速板系统工作原理
如图2所示,减速板手柄到减速板手柄连杆止动器(Lever Brake) [2] 间的机械机构,减速板手柄通过机械连杆传动,飞机速度制动系统的软件模型根据获取的减速板手柄位置信息决定是否激活电源组件(以下称PSU)中的继电器。该继电器激活时速度制动作动器(Speed Brake Actuator)开始工作,从而通过减速板手柄连杆止动器与减速板手柄连杆的离合作用驱动减速板手柄的自动伸出和收回。
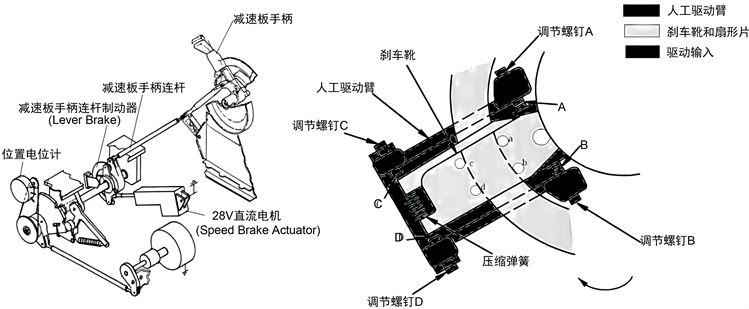
Figure 2. Mechanical structure diagram of speed brake and lever brake
图2. 减速板和杆刹机械结构图
速度制动作动器顺时针运动,带动扇形片运动,扇形片带动刹车靴通过调节螺钉A作动驱动输入轴,完成自动伸出操作。此时调节螺钉C不作动刹车靴,不使销钉b和c解锁,靠弹簧力保持刹车靴锁紧,与扇形片一起顺时针运动。
速度制动作动器逆时针运动,带动扇形片运动,扇形片带动刹车靴通过调节螺钉B作动驱动输入轴,完成自动收回操作。此时调节螺钉D不作动刹车靴,不使销钉a和d解锁,靠弹簧力保持刹车靴锁紧,与扇形片一起逆时针运动。
调节螺钉C旋进时压缩弹簧,减小Speed Brake放出力度;旋出时释放弹簧,增大Speed Brake放出力度。调节螺钉D旋进时压缩弹簧,减小Speed Brake收回力度;旋出时释放弹簧,增大Speed Brake收回力度。调节时需注意上部C点间隙过小,Lever Brake自动伸出会打滑,下部D点间隙过小,Lever Brake自动收回会打滑。
Lever Brake摩擦力的大小直接影响到减速板手柄的力度。在理想状态下,速度制动作动器输出完全作用于克服Lever Brake摩擦力做功,继而驱动减速板手柄移动,因此通过监控速度制动作动器电流的情况,就能判断出减速板手柄处在哪种状态,从而指导维护人员进行预防性维护和纠错性维护,加之速度制动作动器拆装困难,设计一套监控速度制动作动器电流的物联网监控系统进行预防性维护工作极为必要。
3. 基于电流传感器的物联网监控系统
3.1. 速度制动作动器工作电流理论计算
根据AMM (飞机维护手册)手册 [3] 可知,人工移动减速板手柄从DOWN到FLIGHT DETENT位需要力的参考值为20 pounds,FLIGHT DETENT到UP位为28 pounds,UP到FLIGHT DETENT位为28 pounds,FLIGHT DETENT到DOWN位20 pounds。因此,减速板移动手柄推荐的力在20 pounds至28 pounds间,自动减速板手柄移动速度约为2 m/s,P = Fv = UI,可计算出环路正常工作电机功率应为17.8 W至25 W,环路电压28 V,电流应为0.6 A至0.9 A。
调节Lever Brake C,D调节螺钉至自动减速板手柄可正常伸出和收回时,测得的电流在0.59 A至0.92 A之间,超过这个区间,速度制动作动器工作将发生异常。通过测试,在环路电流值为0.8 A时模拟机减速板手柄工作在最优状态。因此,在我们的物联网监控系统中将电流的监控阈值设置为0.59 A至0.92 A。接近或者超出阈值时,监控模块将在WEB监控页面上标记出设备异常告警信息,同时通过钉钉群机器人及时通知维护人员。维护人员根据监控的电流情况,及时进行预防性维护和纠错性维护。
3.2. 基于电流传感器的监控系统
本监控系统(见图3)中电流传感器信号采集模块,用于采集速度制动作动器的工作电流;终端节点模块,用于采集传感器信号采集模块的传感器信息,并将监测数据上传至物联网云平台;物联网云平台,用于接收和保存监测数据,并提供实时查询和可视化服务,以及根据监测数据通过实时通讯软件推送设备异常信息。
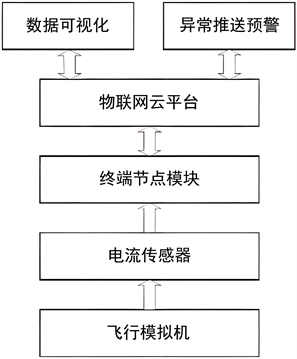
Figure 3. Schematic diagram of monitoring system modules
图3. 监控系统模块示意图
3.3. 终端节点模块
终端节点模块包括STM32F4系列单片机 [4] 、FLASH、硬件看门狗电路,同时与485转换模块连接,并支持以太网通信。
电流传感器处使用的是485电平,而STM32F4单片机使用的是TTL电平,所以需要一个电平转换芯片来协商,本设计中采用SP3485芯片进行电平转换,以太网通信采用低功耗的10/100M以太网PHY层芯片LAN8720A。
MCU与PHY连接图(图4)主要包含两部分:RMII接口,实现以太网数据从MCU到PHY芯片的双向传输;SMI站点管理接口,实现MCU对PHY芯片内部寄存器的R/W。
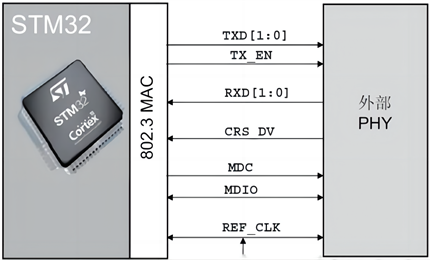
Figure 4. Diagram of connection between single-chip microcomputer and Ethernet chip
图4. 单片机与以太网芯片连接示意图
3.4. 物联网智能监控
阿里云的物联网平台优势如下:提供可视化搭建模块,用于提供WEB可视化搭建服务,通过拖拽和配置的方式,得到设备数据监控WEB页面;提供可视化实时监控模块,用于根据设备数据监控WEB页面的配置,将所述监测数据进行显示;提供实时查询模块,用于根据用户操作对设备的实时监测数据或历史监测数据进行查询并返回给用户;提供异常监控模块,用于实时监控上报的设备监测数据,根据脚本配置的业务逻辑在检测到异常时发出设备异常告警信息;提供实时推送模块,用于根据所述异常监控模块的设备异常告警信息通过实时通讯软件将设备异常信息推送给维护人员。
物联网监控终端设备通过采集独立安装在模拟机的电流传感器输出信号,从而获取模拟机减速板直流电机运行状态信息,通过以太网传输到阿里云服务器中,云服务器可以将数据实时显示在WEB监控平台。基于阿里云的模拟机监控系统是将各类传感器输出信号进行处理,转换成RS485信号进行以太网传输,主机将数据上传云端再进行业务逻辑处理,最终显示在监控屏幕上(见图5),图6为监控的直流电机正常工作时的电流。
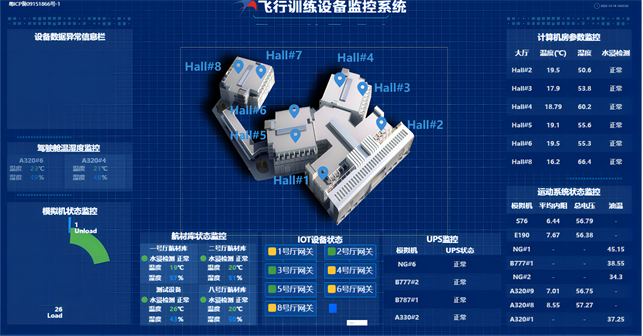
Figure 5. The simulation training equipment monitoring system based on Aliyun
图5. 基于阿里云的模拟训练设备监控系统

Figure 6. Normal working current of DC motor
图6. 直流电机正常工作电流
4. 结束语
全动模拟机作为宝贵的飞行训练设备,其驾驶舱中的一切设备使用频率相较于一台真飞机要高很多。即使模拟机采用的真飞机件,其高损耗度使得故障发生率提高,加上模拟机本身还拥有众多的模拟设备,庞大的模拟机系统有时往往无法很快、很精准找到故障原因、故障点。本文针对某型全动模拟机减速板无法自动伸出故障,设计了基于电流传感器的物联网在线监控系统。该系统将减速板的工作状态实时显示在WEB页面,做到对自动减速板的不间断监控,以便维护人员能实时掌握自动减速板的工作状态,及时进行预防性维护和纠错性维护工作。