1. 引言
随着电子信息技术的更新迭代,探测定位技术在不断发展,同时探测定位技术在军事斗争中的地位和作用得到不断提高。传统的有源探测定位会不断发射出电磁波,极易被对方侦查到,威胁自身生命安全,导致生存能力下降 [1]。
相比于有源定位技术,无源探测定位技术具有很多优点,其中最重要的一点是本身不发射信号,因此不易被对方捕获自身的位置,使得自身生存能力大大提升。因此无源定位技术得到越来越广泛的研究和应用。本文针对无人机编队调整问题,通过纯方位无源定位方式对无人机进行调整。
2. 国内外研究现状
对无人机进行定位,常用的方法有以下几种:基于声学定位、图像匹配定位、有源雷达定位和无源定位。
基于声学定位,简单来说就是通过相应的设备接受目标的声波,利用声波的传播原理,对声波信号进行分析处理从而对目标进行定位。无人机的声源定位存在多种方法,麦克风阵列技术是声源定位和跟踪中应用较为广泛的一种方法,麦克风阵列技术基于麦克风阵列接收空间声信号,随后将接收到的信号进行分析处理,通过分析后的数据估算出声源所在的距离位置。但此种方法需要分析声波信号,这涉及到数字信号处理等多种理论知识,因此研究难度较大 [2]。
图像匹配定位,就是在有变换的空间中寻找多样的变换,使其在不同时间下获得的来自不一样的传感器、不一样的方位的图像在空间维度上具有一致性。为了得到无人机在卫星遥感图像中的位置坐标,将航拍图像与卫星遥感图像进行匹配,使用特定的算法锁定航拍图像在遥感图像的位置坐标,从而确定无人机的位置坐标,但由于算法存在不完善性,且算法易受卫星遥感图像自身特性的干扰,因此定位的精度存在一定偏差度 [3]。
有源雷达定位,就是通过自身发射电磁波,对目标的电子设备进行定位,雷达利用自身的设备接收目标反射的波动信号进行分析求解,得到目标的距离、速度等信息。雷达得益于其全天时全天候、覆盖范围广、作用距离远、探测精度高等优点,成为对无人机进行定位的首要选择。但雷达探测可能会受到严重的地物杂波干扰导致其接收回波的信杂噪音比低,若飞机的速度慢则会使接收回波的多普勒频率低,同时雷达散射截面积小存在接收回波能量小的缺点。所以雷达不适用于探测低空、慢速、小型的无人机,而且有源雷达对其他的通讯设备影响较大 [4]。
无源定位,指的是只通过接收电磁波信号对目标进行定位的技术。接收目标发射的电磁波信号,并对接收信号进行相应处理,通过各种定位方法以及算法得出该目标的距离信息。由于无源定位只能检测到什么时候收到什么方位的信号,因此无论采取何种方法计算,无源定位都需要有多站提供信息。并且侦察站应具有良好的几何布局,这可以提高无源定位的定位性能。常见的定位方法有三角交叉定位、双曲线交叉定位等 [5]。但由于无源定位存在精确性和实时性的问题,因此选择合适的算法提高定位系统的精准度一直是无源定位研究的热点和难点。
唐涛等人 [6] 利用伪线性卡尔曼滤波定位算法,该算法将非线性的观察方程表示成线性方程,对线性方程进行扩展卡尔曼滤波。这不仅可以减少非线性观测方程对定位精度和算法稳定性的影响,同时对算法的迭代运算量基本上没有增加。但由于线性化带来的误差,以及观察更新矩阵包含一些方位角和仰角的观测信息,因此没有完全消除误差。
孙霆等人 [7] 提出一种基于半定松弛(SDR)技术的无源定位算法,联合到达时间差(TDOA)以及到达频率差(FDOA),将无源定位问题转化为具有2此等式约束的最小二乘法问题,利用半定松弛技术把约束最小二乘问题变成半定规划问题。该算法求解无需先验的初始解,但当算法计算量较大时,实时性无法保证。
王小英等人 [8] 提出一种三维移动目标无源定位算法,基于代数几何概率,利用信号测量值的时空变化量信息对空间移动目标进行三维定位。该算法收敛速度快且稳定性强,具有一定的实用性。但其只适用于近空间或邻近空间高速移动目标,因此适用性受限。
Tao Yu等人 [9] 提出一种不依赖基线长度的双站无源定位算法,该方法将基线长度作为未知量求解,利用时差和方位测量的双站定位系统具有测量冗余的特性,导出完全独立于两个站之间基线长度的位置解。它通过两站实现单站定位,兼具测向系统设备简单、时差定位精度高的优点。但在实际检测过程中,两站定位系统的检测精度与检测站与目标的相对位置密切相关,对于双站定位系统,可用的检测区域是有限的,从而定位系统和目标过远,导致目标定位误差较大。
本文根据实际问题背景,采用遗传算法对无人机进行无源定位,利用遗传算法良好的全局搜索能力降低无源定位的定位误差,其鲁棒性高的特点也使得算法具有优秀的稳定性。
3. 无人机编队调整方案问题背景
在10架无人机构成的圆形飞行编队中,9架无人机(编号FY01~FY09)均匀分布在圆周上,另1架无人机(编号FY00)位于圆心,无人机自行检测高度信息,确保各无人机位于同一高度。见图1。
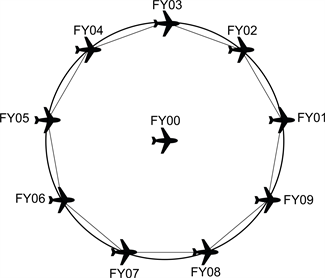
Figure 1. Schematic diagram of a formation of circular UAV
图1. 圆形无人机编队示意图
按编队要求,确定圆形编队中的圆形半径为100 m。当初始时刻无人机位置存在偏差时,通过多次调整,每次选择编号为FY00的无人机和圆周上至多3架无人机发射信号,其余无人机接受信号,调整编队到理想状态,使得9架无人机最终均匀分布在圆周上。
针对以上情况,根据无人机的初始位置、圆形编队半径参数,设计出无人机编队调整最优方案,使其能够准确调整到理想位置。案例中无人机初始位置,具体数据见表。

Table 1. Polar table of the initial moment of the drone
表1. 无人机初始时刻极坐标表
4. 模型准备
4.1. 无人机的几何关系探索
发射信号的无人机位置关系存在以下4种可能:
1) 发射信号的无人机相邻,则与FY00相夹40°;
2) 发射信号的无人机相隔1个,则与FY00相夹80°;
3) 发射信号的无人机相隔2个,则与FY00相夹120°;
4) 发射信号的无人机相隔3个,则与FY00相夹160°。
以FY05、FY00为固定发射例,FY04为待定位例,则无人机的方向信息示意图,见图2。
通过图2我们可以将发射信号无人机与接收信号无人机的位置分为夹与临两种状态,见图3。
图3中上部分为夹的状态,下部分为临的状态。
4.2. 根据几何特征的定位分析
由问题背景所给的条件:1) 发射信号的无人机位置无偏差且编号已知的;2) 接收信号的无人机位置是存在偏差的。
在无偏差的情况下,9架无人机均匀分布在圆周上,根据题给条件1,发射信号无人机的位置无偏差,因此发射信号无人机的排布满足正九边形的几何特征。具体体现在:无偏差时,发射信号无人机之间的角度关系与距离关系是确定的,即图4中紫色线段长度、发射无人机之间的圆心角可知。
考虑发射信号无人机与接收信号无人机的位置为夹和临时的几何特征。
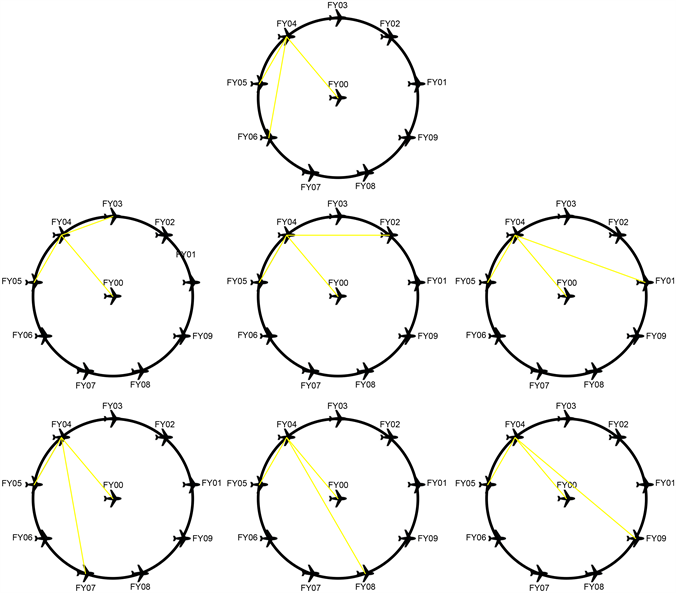
Figure 2. Launch signal UAV possible location relationship
图2. 发射信号无人机可能位置关系
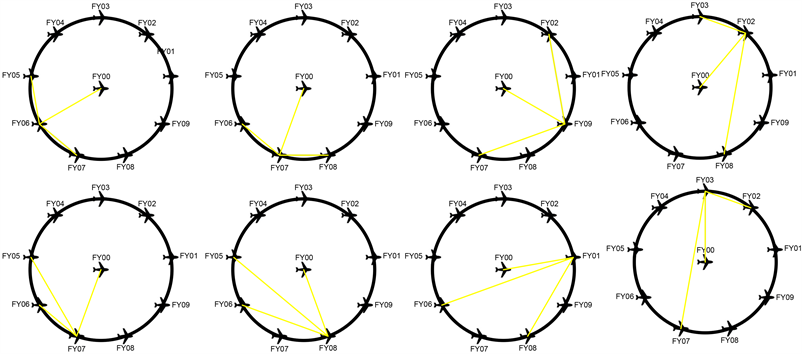
Figure 3. The possible positional relationship between transmitting signal UAV and receiving signal UAV
图3. 发射信号无人机和接收信号无人机可能位置关系
通过图5和图6我们可以发现,位置为夹或者临时,待定位无人机都是以发射信号无人机之间的连线为弦和方向信息
而确定圆的公共交点。
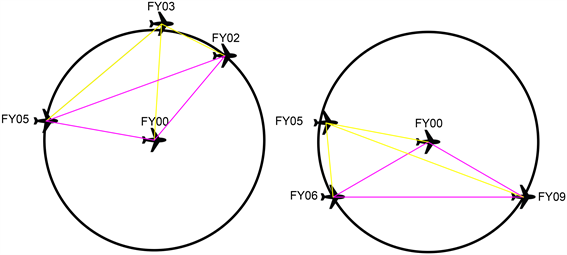
Figure 4. Angle and distance relationship between transmitting signal drones without deviation
图4. 无偏差时发射信号无人机之间角度与距离关系
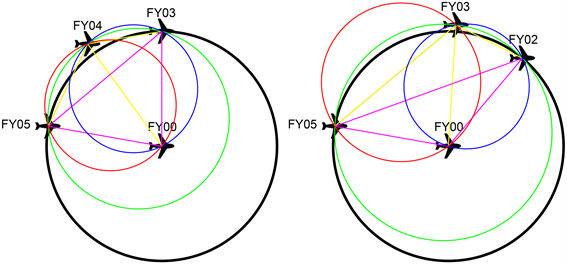
Figure 5. Geometric features when the positions of the transmit signal UAV and the receiving signal UAV are sandwiched
图5. 发射信号无人机与接受信号无人机位置为夹时的几何特征
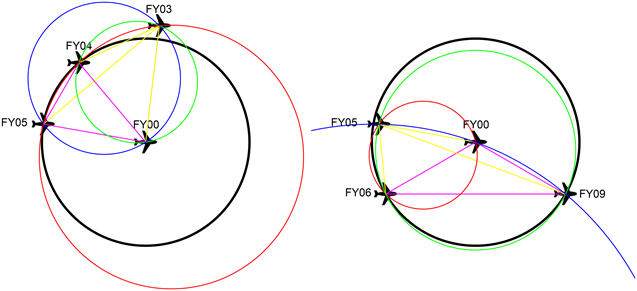
Figure 6. Geometric features when the positions of the transmit signal UAV and the receiving signal UAV are adjacent
图6. 发射信号无人机与接收信号无人位置为临时几何特征
4.3. 无人机偏差范围的合理分析
初始偏差范围:
计算未知编号的数目时,在保留模型的准确性并使得模型更加易算,现分析无人机的偏差范围。根据题给条件我们可以知道,无人机编号固定并且在编队中与其他无人机的相对位置关系保持不变,即以无人机FY02为例,FY02总是位于FY03的东南方向,FY02总是位于FY01的西北方向。据此,得到无人机的初始偏差范围,见图7。
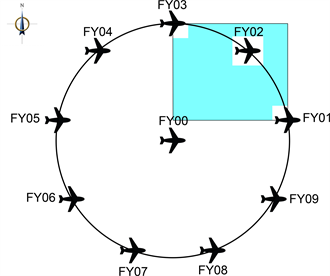
Figure 7. Initial UAV deviation range
图7. 无人机初始偏差范围
偏差范围的进一步优化:
通过无人机的相对位置关系,我们可以得到初始偏差范围,结合问题背景中表一所给数据,分析得到无人机的距离偏差值总是小于12;无人机的角度偏差值总是小于0.30度,据此,我们认为,距离偏差值与角度偏差值不会发生过大波动,假设距离偏差范围是在12以内,角度偏差值范围是在0.3度以内。
得到进一步优化后的无人机偏差范围,见图8。
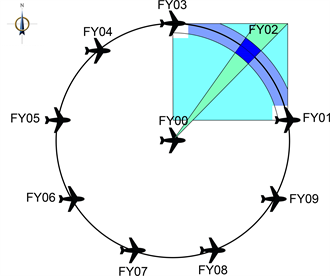
Figure 8. Further optimized UAV deviation range
图8. 进一步优化后的无人机偏差范围
其中,淡蓝色区域为初始误差范围;淡绿色区域为角度确定的偏差范围(为了表示更清晰,调大了偏差角度范围,实际角度范围应为1度,即正负0.5度);淡紫色区域为距离确定的偏差范围(图像中调大了偏差距离范围,实际距离范围应为无人机距圆心距离正负15厘米);深蓝色为各偏差范围的重合区域,该重合区域中的任意点都是合理偏差范围内的,使得:
1) 发生偏差的无人机与其他无人机的相对位置关系恒定;
2) 角度偏差合理;
3) 距离偏差合理。
5. 模型建立
5.1. 无人机定位原理分析
在模型准备中,我们知道,待定位无人机位置可以由三个圆的交点得到,并且这三个圆都是通过发射信号无人机的连线为弦、方向信息
为圆周角所确定的。因此,在以发射信号无人机的连线为弦、方向信息
为圆周角所确定的圆的公共交点中,必定有一个是待定位无人机所处的位置。
根据发射信号无人机之间的距离、角度关系和方向信息,我们可以确定出6个圆,见图9。
图9中,蓝色的圆
是通过方向信息
确定的;红色的圆
是通过方向信息
确定的;绿色的圆
是通过
确定的。
在确定一组圆
时,可以得到三个圆的几何关系,由于存在6个圆(3组,每组2个),对应23种情况,见图10。
将圆上的点整理到集合上表示为:
其中,
为
与对应弦所确定两个圆上点的集合;
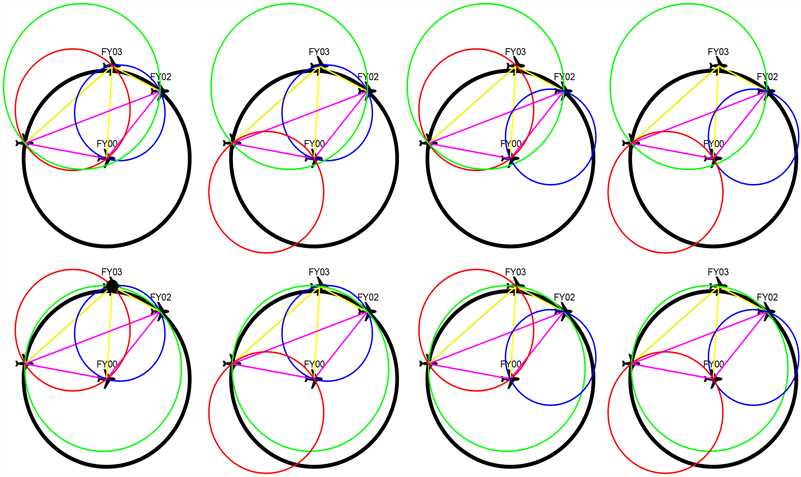
Figure 10. Possible circle intersection situation
图10. 可能圆相交情况
为
与对应弦所确定两个圆上点的集合;
为
与对应弦所确定两个圆上点的集合。
则8种情况可以表示为:
即:
对
,当
等于一点时,则无人机位置唯一确定;
等于多个点时,则说明无人机位置需要筛选。结合模型准备中确立的偏差范围,以拟测位置与无偏差理想位置之间的距离为标准,距无偏差理想位置最短的拟测位置便是待测无人机位置。
5.2. 纯方位无源定位模型
以O (FY00无人机位置)为极点,设发射信号的无人机为A (FYOA)、B (FY0B),设圆形编队的半径为D,以OA为极轴,则FY0A和FY0B的极坐标为:
、
,
为A、B夹角。
以OA为弦及对应圆周角确定圆的示意图(OB、AB形同),见图11。
以OA为弦,对应方向信息夹角为圆周角时,弦长
易得:
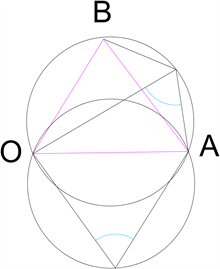
Figure 11. The circle was determined with OA as the string and the corresponding circular angle
图11. 以OA为弦及对应圆周角确定圆
(1)
令圆心C为
,则由两点间距离公式得:
(2)
进而可以确定圆的极坐标方程为:
(3)
以OB为弦,对应方向信息夹角为圆周角时,弦长
同理易得:
圆的极坐标方程为:
(4)
以AB为弦,对应方向信息夹角为圆周角时。
可得圆的极坐标方程为:
(公式推导见附录)
(5)
至此,我们得到了6个圆的极坐标方程,进而可以得到
的表达式,通过对的分组求交集,就可以得到公共交点(拟定位点),综上所述:
(6)
(7)
(8)
5.3. 拟测位置的筛选
当拟测位置集合J含有两个元素时,即
,那么拟测位置
就是待定位无人机的位置。
当J含有多个元素时,即
,那么拟测位置中必定包含待定位无人机的位置。
在模型准备中,我们确定了合理偏差范围的存在,依据这种思想,在拟测位置中,距离
中,距离待定位无人机无偏差理想位置距离最近的拟测位置即是待定位无人机的位置。
设拟测位置与无偏差理想位置的距离为,目标函数如下:
(9)
解得的位置便是待定无人机的位置。
5.4. 偏差分析
为了衡量无人机的偏差大小,建立偏差度指标E,
表明i编号无人机的偏差度。
设第i个无人机第N次调整的位置为
(例:当N=0时,表示第i个无人机的初始位置)则:
(10)
其中,
为i编号无人机的无偏差理想位置
,不同的无人机所对应无偏差理想位置是固定不变的。
值最小的就是最需要选定的发射信号无人机。至此,确定出发射信号无人机的待选优先级,但是在题目中,每次调整至多选择除FY00之外的三架发射信号无人机,所以我们还需考虑在第N次调整时,选择发射无人机的数目。
由于假定发射信号无人机无偏差时会产生有偏差的理想位置,因此,设立理想位置偏差度指标为
,对于不同的发射信号无人机的位置,我们可以得到不同的接收信号无人机的偏差理想位置,进而求出理想位置偏差度指标。
设第i个无人机N次调整的偏差理想位置为
(11)
进一步,设在第N次调整后位置的全局偏差度为AE,
(12)
通过AE的大小,我们就可以评判出当前无人机位置的全局层面的调整的有效性。在选定3架无人机发射信号时,我们能得到唯一的发射信号AE;在选定4架无人机发射信号时,我们会得到多个AE。
在选择4架无人机发射信号时,我们只需要选择4架无人机中的3架即可确定其他无人机的位置,因而选定4架无人机时,是以每3架无人机为一组,得到4个待定无人机位置,通过对这4个位置的偏差度分别进行计算,选择其中偏差度最小的即可。之后,再对比不同增设数量情况下的AE,就能判定增设发射无人机的数目及编号。
6. 算法设计
针对无人机的纯方位无源定位,需要以三台无人机为发射站。由本文题意可知,圆心必为一个发射站,那么还需两台发射站对某一无人机进行定位。由于纯方位无源定位中接收的信息只有三个方位角,见图12。
这就导致通过传统数学方法确认无人机的具体坐标实现难度较大,且结果存在不准确性。遗传算法是一种基于自然选择原理和自然遗传机制的寻优算法,由于遗传算法的群体搜索特性,得到无人机准确的位置 [10]。遗传算法思路如下:
假定发射信号无人机是位于理想位置,那么我们可以根据方向信息建立适应度函数。由于初始时刻位置已知,此时我们可以求出每架无人机与其他无人机对应的方向信息。那么,从而建立适应度函数:
其中,
为待测无人机与任意两架无人机(除圆心所在的无人机)的理想方位信息,
为待测无人机与任意两架无人机(除圆心所在的无人机)的实际方位信息。具体算法流程见图13。
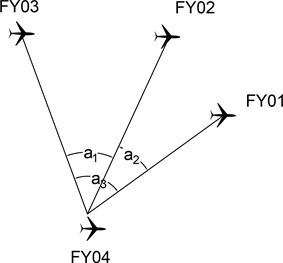
Figure 12. Schematic diagram of the UAV orientation information
图12. 无人机方位信息示意图
通过遗传算法得到除发射信号无人机的以外所有点需要移动的坐标后,我们通过迭代法进行逐步动态寻优操作。即找到使得偏差平均值的减小量最大的发射信号无人机。具体算法流程,见图14。
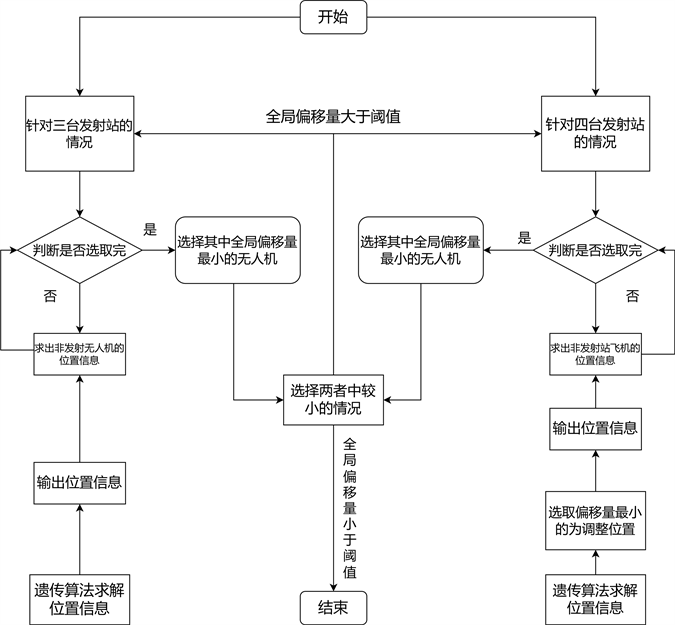
Figure 14. Flow chart of iterative optimization algorithm based on genetic algorithm
图14. 基于遗传算法迭代寻优算法流程图
本文针对两种情况进行分析,首先通过遗传算法求出非发射无人机的位置信息,通过遍历得到全局偏移量最小的无人机作为发射站。最后迭代求解得到编队方案。
7. 算法实例分析
针对表1中无人机初始时刻极坐标表,通过遗传算法定位进行迭代,得到增加的发射站如表2所示,本文发现每次增设的发射站(除圆心外)为两架,即每次设置的发射站皆为三架,这说明设置三架发射站对于偏差平均值的影响比设置四架发射站更佳。
通过每次具体的调整位置,并绘制每次调整方案中偏差平均值的变换折线图,如图15所示,我们发现当调整次数到达14次时,再进行调整其偏差度平均值不会出现较为明显的减少情况,所以认为当调整次数达到14次时,已经得到较好的调整方案,并且偏差平均值随着每一次的迭代下降,说明算法具有合理性。
Table 2. Standard test system result data
表2. 标准试验系统结果数据
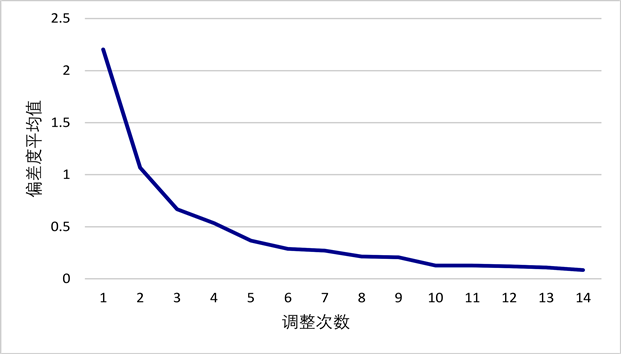
Figure 15. Line plot of change of deviation mean
图15. 偏差平均值的变化折线图
Table 3. The drone’s final adjustment position table
表3. 无人机最终的调整位置表
由表3可知最终调整方案的极坐标位置与理想位置的偏差极小,可以认为无人机基本位于理想位置。
8. 结语
基于遗传算法的无人机纯方位无源定位解决了无人机调整编队问题,通过设计的遗传算法定位可清晰地知道每一次具体方案,同时偏差平均值可以反映出每一次调整方案后的效果。本文对纯方位无源定位的研究提供了一定思路,由于遗传算法的可扩展性,对于其他问题的研究具有一定的借鉴意义。
附录
以ab为弦时圆的方程的推导
弦长
易得:
(13)
令圆心C为
,则由两点间距离公式得:
(14)
联立得:
(15)
由
其中,
联立可得:
(16)
根据
,解得:
(17)
由
易得:
(18)
所以,
(19)
由
得:
(20)
NOTES
*通讯作者。