1. 引言
随着我国城市化进程不断推进,高层建筑已与人们生活息息相关,随之而来的是如何保证高层建筑在施工和运营中的安全是人们亟需面对的问题。墙面平整度的检测就是反映建筑安全关键的一环,其反映了建筑物墙体凹凸程度以及整体墙面的均匀程度,该指标是衡量建筑物工程质量是否合格的重要标准,其结果也直接关乎建筑物的美观和安全使用。传统的建筑物墙面平整度检测方法应用较广检测有全站仪检测法、红外水平检测法,白炽灯检测法 [1]。这些检测方法由于分布点位不均匀,整体的检测精度低,且操作实践比较繁琐,需大量的人力劳动且工作效率较低。
三维激光扫描技术是近几十年来发展的新兴技术,它速度更快,且无需直接接触建筑,能快速精确地实现建筑三维立体的快速检测。本研究通过三维激光扫描仪自动化获取建筑物墙面数据,采用最小二乘法拟合建筑物墙面 [2],用来计算平整度。
2. 点云数据
2.1. 点云数据采集设备
研究外业数据采集过程中,使用仪器是Riegl VZ-1000三维激光扫描成像仪,如图1所示。该仪器每秒可以发射高达300,000点的纤细激光束,提供高达0.0005˚的角分辨率,该扫描仪具有长距离、高精度、快速度、轻巧便携的特点,采集数据中分辨率设置为100米处5 cm。

Figure 1. RIEGL VZ-1000 3D laser scanner
图1. Riegl VZ-1000三维激光扫描仪
2.2. 点云数据处理
2.2.1. 点云数据拼接
本次实验数据采集共设置5个站点,用于获取研究建筑墙面的点云数据,站点分布如图2所示,对五个站点数据获取后对点云数据进行拼接,获得完整的研究墙体点云数据结果。
2.2.2. 点云数据抽稀及去噪
1) 点云数据抽稀:三维激光扫描技术可以在短时间内快速的获取测量目标的海量点云数据,海量点云数据一方面可以详细描述物体特征,另一方面也为数据处理带来了困难 [3]。不同测站的点云数据配准后在
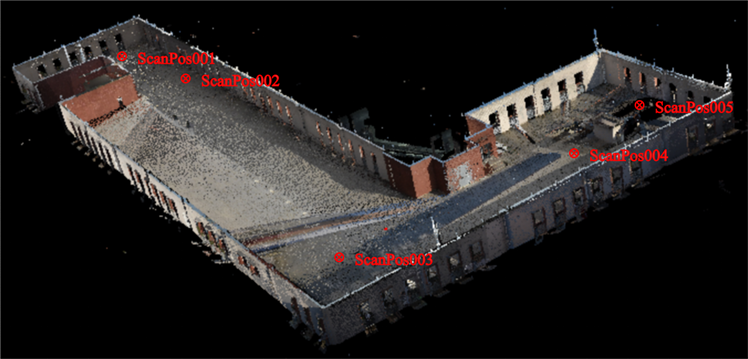
Figure 2. Scanning site distribution and overview of the study area
图2. 扫描站点分布及研究区概况图

Figure 3. Point cloud data of research area after eliminating redundancy
图3. 消除冗余后研究区点云数据
重叠区域往往存在大量重复的点云数据,这些重复的点云数据会导致计算机运行低效率,造成数据处理缓慢,运算效率低下 [4];由于本实验涉及的站点较多,且站点数据量较大,重复点云较多,因此在对数据使用前需对数据进行去冗和简化处理。研究经过处理后的点云数据从29,354,954个点减少到了9,774,824个,如图3所示,消除冗余后的点云数据很好的保持了原有的地物特征,又大大的减少了数据量。
2) 点云数据去噪:点云数据在获取的过程中,通常会受到光照、扫描设备、空中悬浮物等方面的影响 [5] [6] [7] [8],扫描的数据会受到噪声的污染,使得获取的数据不能直接投入使用,因此需要对噪声进行去除。如图4所示,在经过抽稀后的研究对象的点云数据周围仍然存在大量孤立的点云,所以需要对其进行去除,本实验主要通过人工参与将噪声去除,结果如图5所示,噪声已经去除掉,可以进行下一步的实验。

Figure 4. Point cloud data with noise
图4. 含有噪声的点云数据

Figure 5. Point cloud data with noise removed
图5. 除去噪声的点云数据
2.2.3. 提取研究对象点云数据
如图6所示,本文共选择三个区域墙面作为研究对象分布在建筑物不同的方位。

Figure 6. Schematic diagram of wall interception
图6. 截取墙面示意图
3. 平整度计算方法
3.1. 平面拟合原理与方法
空间平面方程可以表示为:
(1)
A、B、C、D为常数,方程两边同时除以D,则有:
(2)
要确定一个平面,关键在于a、b、c三个参数的求解。
设对某平面进行扫描,得到n个点云数据,记为
(
),根据最小二乘原理,该方法拟合平面需满足条件:
(3)
将式(2)代入式(3),且令
则有:
(4)
要满足式(4)即使
,
,
,则有:
(5)
(6)
(7)
写成矩阵形式则有:
(8)
令
(9)
则有
,所以空间平面方程参数
。
3.2. 平整度计算
墙面上每一点
到拟合平面的距离
,表达了点的起伏情况,其整体可以代表墙面的平整情况,其中:
(10)
中误差对一组测量中特大或特效的误差反应非常敏感,能够很好地反映出测量结果波动的大小 [9] [10] [11] [12],故本实验使用中误差m来表达墙面平整度,中误差m的表达式为:
(11)
4. 平整度计算实验结果
4.1. 平面拟合结果
拟合得到墙面方程参数如表1所示,绘制拟合平面与点云数据三维图像,如图7所示;将拟合平面与点云数据集叠加显示,拟合平面与点云数据贴合度较高,拟合效果较好,如图8所示。

Table 1. Fitting plane equation solution parameters
表1. 拟合平面方程解算参数
4.2. 墙面平整度结果分析
图9是墙面点到拟合平面的距离分布的统计直方图,图10是点云数据距拟合平面距离散点图,图11是墙面平整度分布状况,可以直观的观察到点到拟合平面的距离近似的服从正态分布,墙面点到拟合平面距离的波动情况,以及墙面平整度分布状况,总统上分布较为均匀,且三面墙距离较小点云数据占大多数(小于0.005 m),统计结果如表2所示,墙面1的距离最大值为0.0148 m,最小值为−0.0084 m,墙


Figure 7. Point cloud data and fitting plan diagram
图7. 点云数据及拟合平面示意图

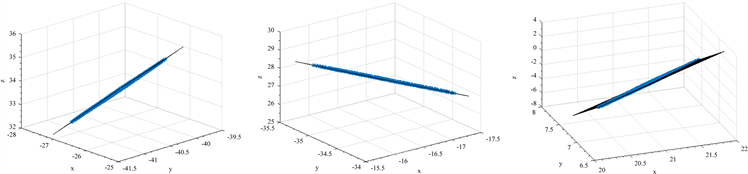
Figure 8. Point cloud data and fitting plane overlay
图8. 点云数据及拟合平面叠加图

Figure 9. Statistical histogram of distance distribution from wall point to fitting plane
图9. 墙面点到拟合平面的距离分布的统计直方图
面2的距离绝对值最大值为0.0042 m,最小值为−0.0041 m,墙面3距离最大值为0.0071 m,最小值为−0.0082 m。根据公式(1)计算得到三面的平整度分别为1.9 mm、1.1 mm、1.1 mm,根据《建筑装饰装修工程质量验收规范》(GB50210-2001) [12] [13] [14] [15] 规定,石砖幕墙的整体平整度是3 mm,这三面墙的平整度均符合要求。
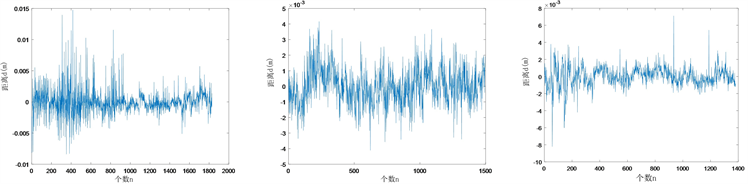
Figure 10. Scatter diagram of distance between point cloud data and fitting plane
图10. 点云数据距拟合平面距离散点图

Figure 11. Distribution diagram of wall flatness
图11. 墙面平整度分布图
Table 2. Wall distance distribution statistics
表2. 墙面距离分布统计
5. 结论
本研究利用三维激光扫描仪进行墙面平整度的检测,使用最小二乘拟合墙面并且对墙面平整度进行了计算,主要结论如下:
1) 三维激光扫描仪可以快速地获取大量的点云数据,对时间和空间要求较低。
2) 三维激光扫描技术能大量获取整个研究建筑的点云数据,在大面积建筑平整度研究中具有优势。
3) 通过最小二乘能够较好地拟合平面,得到平面的空间方程,从而计算墙面点平整度,相较于传统计算方法,该方法较高效、简便。