1. 引言
2. DRFM工作原理
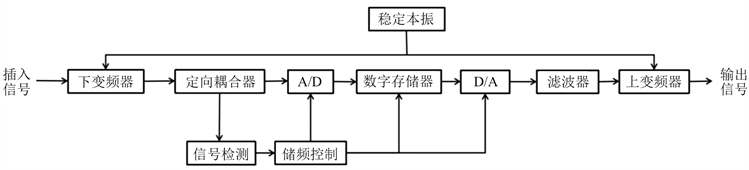
Figure 1. The structural representation of DRFM
图1. DRFM结构示意图
系统的工作原理为:首先,天线接收雷达辐射信号并测出工作频率,在本振的作用下使接收到的射频信号经过下变频器输出DRFM可以处理的中频信号,随后,在定向耦合器的作用下,分为两路:一路送给检波器检测信号的有无;一路经由储频控制电路控制的A/D变换器变换成数字信号并存入数字存储器。在转发信号时,储频控制电路控制数字存储器读出此信号,再送给由储频控制电路控制的D/A变换器转换为模拟信号,然后用与下变频相同的本振作上变频,得到射频输出信号,实现对敌方雷达的干扰 [3]。
与一般的储频器相比,数字射频存储器有下列优点:
1) 最小延迟时间短,大约为10 ns~20 ns;
2) DRFM存储的信号不会随着延迟时间的变化而失真,保真度较高;
3) DRFM根据指令可存储和再现多个同时到达的信号,能存储和复制脉冲压缩信号和脉内相位调制的编码信号;
4) 对基准振荡器进行简单的频率偏移,就可以将多普勒频移加入到复制的信号中,从而实现速度欺骗干扰;
5) DRFM既可以在相干干扰机中使用,也可以在某些情况下代替压控振荡器。
DRFM量化信号的方法主要有幅度取样法和相位取样法。其中幅度取样主要包括单通道幅度取样和正交双通道幅度取样,前者结构简单,但对信号的采样频率较高,在带宽较宽时需要时间过长,很难实现,后者在瞬时带宽相同的情况下,只需要前者四分之一的采样频率,但其不足之处在于要求双通道的幅相特性一致以及需要采用正交双通道的上下变频。相位取样将A/D变换器用极性量化器替代,将D/A变换器用加权相加网络替代,在二者的作用下可以完成高频率采样,且具有较大的瞬时带宽,技术实现也较为简单,但是其输出信噪比较低。
数字射频存储器的存储方式有多种类型,其中最常用的有全脉冲存储方式,式样脉冲存储方式和循环脉冲存储方式三种。全脉冲存储方式就是存储脉冲信号的全部信息,根据需要读取信号进行输出。式样脉冲存储方式是只存储输入信号起始的一小段,然后对这一小段数据进行复制,构成完整信号。循环脉冲存储方式是对检测到的信号进行连续的采样和存储,在经过一段时间延迟后对存储器清零,在整个过程中雷达信号被完整的保存下来。
基于DRFM的干扰机系统可以通过调制存储的雷达信号的不同参数实施不同类型的干扰,典型的DRFM电子干扰包括距离欺骗干扰、角度欺骗干扰、速度欺骗干扰、密集假目标干扰等,本文研究的干扰主要是DRFM干扰机产生的不同角度不同距离的密集假目标干扰。
3. 目标、干扰回波模型
本文所研究的密集假目标是由一架专门携带DRFM设备的干扰飞机在遂行作战任务的飞机周围空域进行的护航干扰,实质是距离假目标在不同角度上的体现,因此雷达接收回波模型中应当存在空间维度,以体现出在角度上的差异性,从而方便进行特征向量的构建。本文采用单脉冲天线方向图与雷达方程结合的方式进行对目标、干扰信号的建模 [4]。
设雷达发射功率为
,发射天线增益为
,则雷达在自由空间工作时,与雷达距离为R处的功率密度为:
(1)
雷达发射天线向自由空间辐射电磁波,遇到目标后由于目标的散射特性向四周散射。目标的散射特性用
来表示,若不计电磁波在散射过程中的功率损耗,则雷达接收天线接收到的散射回波功率密度可以表示为:
(2)
假设接收天线的有效接收面积为
,则雷达接收的回波功率为:
(3)
考虑到天线增益和有效面积之间存在如下关系:
(4)
则将式(4)代入式(3)可得雷达接收回波功率为:
(5)
雷达在实际工作过程中,由于空气等物质的影响,电磁波在传递过程中会产生衰减损耗,计入各种衰减损耗,可以将雷达接收回波功率修正为:
(6)
在雷达系统中,雷达发射波形的选择很大程度上取决于雷达的任务和受干扰条件,常用的发射波形有:线性调频信号波形、相位编码信号波形、相参脉冲串信号波形、巴克码信号波形、M序列码信号波形、步进调频信号波形等,本文主要研究线性调频信号,其波形表达式为:
(7)
实质上,式(7)是发射信号的电压函数,单位为伏特(V),根据电压与功率之间的关系
可以得到发射信号功率,如式(8)所示,其中
为发射信号通过的电阻。
(8)
同理,假设接收信号的电压函数为
,则接收回波信号功率为:
(9)
将式(8)和式(9)带入式(6)中可以得到雷达接收回波电压函数为:
(10)
化简可得:
(11)
现代雷达工作模式一般为收发共用,并考虑到要保证假目标信号与真实目标回波信号接收功率相等,则
,结合单脉冲天线方向图函数可以得到
,将式(7)带入式(10)可以得到回波信号:
(12)
在一个重复周期内,不同距离的目标回波到达时间不同,从发射到接收所经历的时间为
,则实际雷达接收到的目标回波可表示为:
(13)
即
(14)
影响雷达接收信号的因素有很多,包括接收机噪声影响,杂波影响,人为噪声影响等,这些干扰随着回波信号一起被天线接收,从而降低了对目标回波信号的发现概率,使信号“淹没”在噪声里。由于杂波干扰需要特定的条件,这里不对其进行过多阐述,本文将雷达辐射信号的自由空间定义为理想空间,不受地杂波、海杂波等影响,主要考虑噪声因素。
噪声主要有电阻热噪声、天线热噪声和宇宙噪声等,假设天线是理想的,在接收机通带内可以将三种噪声近似看成高斯白噪声,因此噪声的功率谱密度与频率无关,且为常数 [5],即:
(15)
(16)
式(15)表示双边功率谱密度,式(16)表示单边功率谱密度,将式(15)取傅里叶反变换,可以得到白噪声的自相关函数,即
(17)
这表明,白噪声仅在
时刻相关,而在任意
时刻的随机变量均不相关。这里将白噪声用
表示,在平均功率为0 dBW时,噪声分布如图2所示。
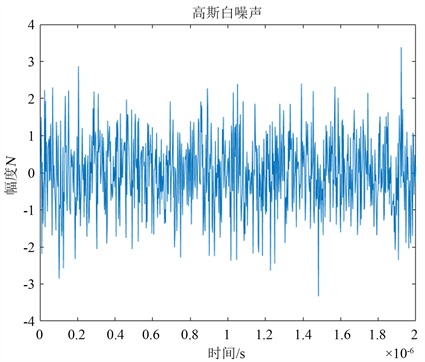
Figure 2. The distribution of white Gaussian noise
图2. 高斯白噪声分布
雷达接收信号电压函数为:
(18)
其中,A为发射信号幅度,
为信号波长,
为目标散射截面积,R为目标与雷达之间距离,L为信号传播过程中的各种损耗,
为中心频率,
为调频斜率,
为回波延迟时间。
4. 特征向量构建与仿真
单脉冲雷达为三通道雷达,分别为和通道,方位差通道,俯仰差通道,以和信号为相位基准,差信号与其比较后在和差比较器输出端输出角误差信号,经过计算可以得到来袭目标的角度信息,在相位检波器的作用下将角误差信号转换为直流误差信号,进而控制天线的转动。本课题仅利用接收回波信号的角度信息来完成真实目标鉴别,因此和信号、方位差信号、俯仰差信号可以作为特征向量进行仿真,但为了保证仿真结果的准确性,利用和信号对和差信号进行归一化处理,最终可得到本课题使用的特征向量。
假设
为和信号,
为方位差信号,
为俯仰差信号,则特征向量矩阵为
(19)
归一化特征向量矩阵为
(20)
式(14)为一个喇叭天线接收信号表达式,整个系统利用四个喇叭天线完成回波信号接收,将四路信号经过和差通道处理后,可以得到下式的和差信号。
和信号:
(21)
方位差信号:
(22)
俯仰差信号:
(23)
现假设线性调频信号脉冲宽度为2 μs,波长
为5 cm,载频为6 GHz,中频频率
为0,带宽B为10 MHz,采样频率
为400 MHz,调频斜率
为5 MHz/μs,幅度修正值A为101.5,噪声强度为−114 dB,天线损耗L为10 dB,目标散射截面积
为2 m2,以等信号轴所指方向为基准,方位角和俯仰角分别为目标和雷达连线与等信号轴在方位和俯仰上的偏角,可以得到方位角和俯仰角均为0˚,目标距离60 km时和通道回波信号波形(图3)及频谱(图4)。
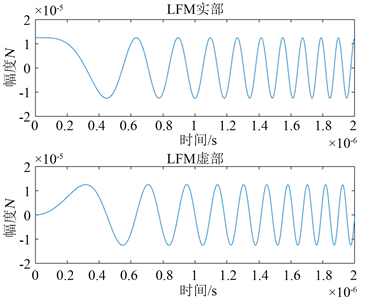
Figure 3. The time domain diagram of chirp signal
图3. 线性调频信号时域图
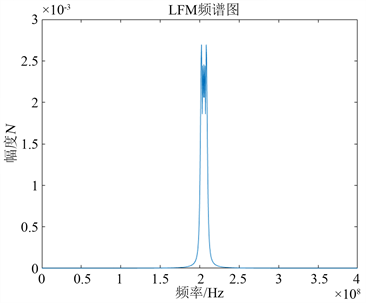
Figure 4. The spectrogram of chirp signal
图4. 线性调频信号频谱图
信噪比是衡量回波信号能否被接收分辨的一项重要参数,它反映了信号在噪声中的可检测程度,因此,在进行信号处理的过程中保持信噪比符合要求是必不可少的。为了确保信号不被噪声“淹没”,信噪比一般选取5~20 dB,基于此,设定高斯白噪声强度为−114 dB,则在脉冲宽度范围内,噪声如图5所示,带噪声的和通道回波信号波形如图6所示。
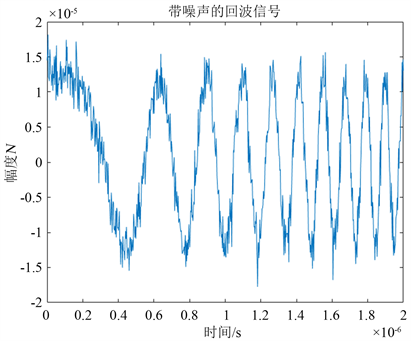
Figure 6. The signal waveform with noise
图6. 带噪声的信号波形
为减弱噪声对信号判决的影响,使接收系统可以很好地对接收到的信号进行分析判断,需将接收信号通过匹配滤波器,抑制接收机噪声,提高信噪比,突出有用成分。
和通道回波信号的匹配滤波器传递函数为:
(24)
将和通道回波信号通过匹配滤波器后输出如式(19)所示,噪声抑制效果如图7所示。
(25)
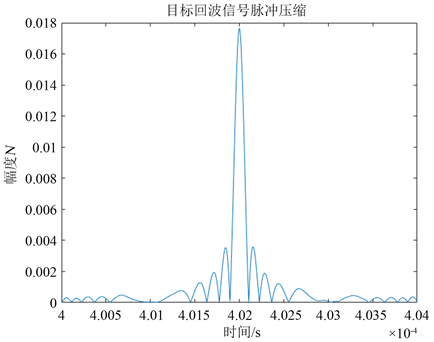
Figure 7. The output of ∑channel signal matched filter)
图7. 和通道信号匹配滤波输出
对比图7和图6可以看出,进行匹配滤波之后,噪声得到了很好地抑制,信号幅度具有一定的提高,图7中的极值点为信号强度最大即信噪比最大的点,此时信号的检测概率最高,因此,将极值点时间坐标带入式(21)、式(22)、式(23)匹配滤波后的表达式中可以得到该目标的和差信号。
根据假目标的产生特点可以得到,真实目标单独出现,假目标连续出现,因此设置4个方向的10个目标,各目标方位角、俯仰角和斜距如表1所示。

Table 1. The incoming direction of objectives
表1. 各目标的来袭方向
其中目标0为真实目标,目标1~9为假目标,将角度和斜距带入式(21)可以得到各目标和通道信号电压函数。
雷达信号的发射和接收均是在一个驻留周期内完成,本课题假设一个驻留周期为2 ms,在驻留周期内,各目标和通道回波信号如图8所示,和通道回波信号匹配滤波后如图9所示。
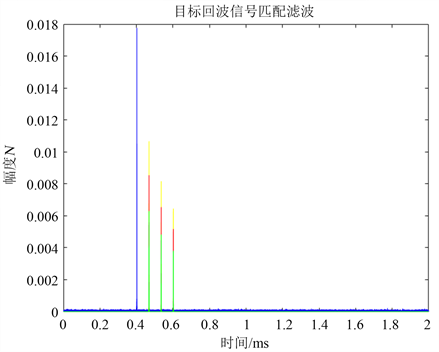
Figure 9. The matched filtering of ∑channelecho signal
图9. 和通道回波信号匹配滤波
图中,蓝色回波代表目标0,黄色回波代表目标1、2、3,红色回波代表目标4、5、6,绿色回波代表目标7、8、9。
将表2中各目标极值点坐标、角度及斜距带入式(21)、式(22)、式(23)匹配滤波后的表达式中可以得到各目标和通道、方位差通道、俯仰差通道回波信号幅度,再利用和通道对三个通道进行归一化处理,可以得到目标的三维特征向量,如表3所示。
Table 2. The time coordinate of extreme point
表2. 极值点时间坐标
5. 小结
NOTES
*第一作者。