1. 引言
近年来,随着人口老龄化,脑卒中的发病率不断上升,急需提供神经康复治疗 [1]。传统的神经康复治疗,通过治疗师按摩对患者的肢体进行刺激或重复训练,可有效促进患者的神经运动功能重建,尽早康复。然而,由于康复过程是一个漫长的“持久战”,花费不菲。传统的一对一训练模式,因康复治疗师数量不足,难以满足需求。将机器人技术应用于康复医疗领域,可大大缓解医疗压力,提高训练效率,降低康复成本 [2]。
近年来,国内外有许多上肢康复机器人的研究。如图1(a)为加拿大ETS团队研制的上肢康复机器人EST-MARSE [3]。图1(b)为意大利帕多瓦大学研发的悬挂式上肢康复机器人NeReBot [4]。图1(c)为上海傅里叶智能科技专为脑卒中患者研发的上肢智能康复机器人M2 [5]。
 (a)
(a) 
 (b)
(b)  (c)
(c)
Figure 1. Representative research on upper limb rehabilitation robots
图1. 上肢康复机器人代表性的研究
从上述研究中可以看出,上肢康复机器人需要提供上肢支承和运动牵引功能,另外,为了提高患者训练主观能动性,还需要提供沉浸式游戏功能。
本文在借鉴国内外现有产品的基础上,开发了一款新型基于生物反馈的桌面上肢神经康复机器人,可为上肢提供有效支承和牵引,进行单一关节或多关节复合训练。与开发的可移动桌面相配合,还可实现沉浸式游戏功能,为患者提供丰富有趣的康复训练体验。
2. 设计方案
2.1. 机器人方案设计
桌面神经康复机器人由4个组成部分构成(图2):1) 上肢驱动机构,2) 座椅,3) 桌面操作物体,4) 有可移动桌面的桌子。
康复训练时,通过上肢驱动机构,支承并牵引患肢移动。通过腕部力传感器感知患者行动意图,实现对上肢驱动机构的力反馈控制。通过桌面可移动桌子和桌面操作物体提供操作目标,实现视觉反馈给大脑,帮助上肢神经康复。

Figure 2. Design scheme of desktop neurorehabilitation robot
图2. 桌面神经康复机器人设计方案
基于生物反馈的神经康复训练,就是利用传感器采集到各种参数进行人机互动,实现人机对话,从而提高患者参与康复过程的主动性,以获得最佳康复效果的康复训练方法。其过程如图3所示。

Figure 3. Neurorehabilitation training process
图3. 神经康复训练过程
2.2. 上肢驱动机构设计
为了降低成本、减小体积、便于推广普及,本研究设计开发了新型的上肢驱动机构,如图4所示。安装于座椅下面水平轨道滑块上的DD电机可以前后滑动,实现肘部前后平移运动。当DD电机回转时,实现驱动水平臂在水平面上做肘部回转运动。由钢丝绳和配重块构成的上肢免重力托举系统,通过小臂托连接患者肘部和前臂,实现肘部升降运动。整个装置的驱动部分均安装于座椅下面,只有水平臂和臂托露在上面,因此结构既安全又简洁。
 侧视图
侧视图 正视图
正视图
Figure 4. Structure of upper limb rehabilitation robot
图4. 上肢康复机器人结构
2.3. 移动桌面的设计
当前一些流行的桌面康复训练机器人,均采用显示器来为患者提供视觉反馈(如图1(c))。但是这种方式存在着不足之处。首先,患者训练时的视线需要抬头看着显示器,而不是低头看自己的手部附近,这种视线不够自然。其次,显示器显示的内容需要预先大量编程,具体使用时也不易修改。
为了实现更加自然的视觉反馈,增加康复训练的趣味性,本文提出了移动桌面的设计方案。移动桌面由可往返运动的传送带制成,再在上面放置上桌面操作物体,例如康复训练用木插板,就可以组成带有视觉反馈效果的训练系统(图5)。可移动桌面可以提供X方向的往复运动,木插板如果下面配上走行履带小车还可以提供Y方向的往复运动,从而制成具有2维平面游戏功能的可移动桌面。
 可移动桌面
可移动桌面  木插板
木插板
Figure 5. Photo of moveable platform and wooden peg inserting board
图5. 可移动桌面和木插板的照片
上肢康复机器人系统及其康复应用情况如图6所示。通过静止和移动桌面,当桌面不动时,机器人辅助操作可以施行“定点打靶”。当桌面左右移动时,机器人辅助实施难度更高的追逐移动物体的“移动打靶”的游戏,通过趣味游戏激发患者全身心投入到康复训练中,提高神经康复训练的疗效。
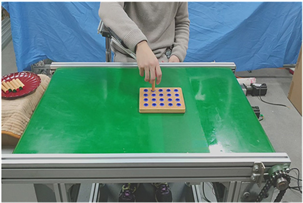
Figure 6. Rehabilitation robot system and its scene in rehabilitation
图6. 康复机器人系统及其康复应用情况
为了减少康复机器人编程工作量,降低系统应用难度,同时也为了使治疗师专注于个性化治疗方案的制定,本文提出的桌面神经康复机器人还具有示教与再现功能。当机器人处于示教模式时,治疗师可以手动拖动机器人臂部以形成示教轨迹,机器人的传感器将记录示教轨迹上一系列示教点的位置信息。当机器人处于再现模式时,会读取示教点位置,并控制机器人依次到达,从而再现示教轨迹。通过这种方式,治疗师不需要编程,自然人机交互输入示教轨迹,便于摸索试制出定制化、个性化的治疗方案。
2.4. 控制系统设计
上肢神经康复机器人的控制系统是基于力反馈和位移反馈的。柔顺控制策略以控制机器人和外界环境两者交互间的阻抗为目标,分为阻抗和导纳控制。阻抗控制是基于位置控制外环与力控制内环的方式对系统的动力学进行建模。导纳控制是基于位置控制的内环与力控制的外环。阻抗控制计算的结果是力矩信息,它需要机器人输出的力矩(减速器输出端的力矩,而不是电机的输出力矩)是可控制的,这对大多数机器人来说是很难做到的,电机的输出力矩可以精确控制,然而经过减速器后的损失,由于关节缺乏力矩传感器而无法精确获取。而导纳控制计算的结果是位置信息,这对于机器人来说是很容易实现的。它的基本思想是:通过检测系统与外界的接触力建立一个二阶导纳模型,生成一个附加位置再去修改预先设定的位置轨迹,最终送去内环完成最终的位置控制 [6]。这种方式使得系统不需要动力学建模且特别适合于位置控制效果好的伺服系统。所以目前力控制中的应用多以导纳控制为主。对于位置控制来说,检测机器人与环境间的交互信息最常用的就是在电机尾部加编码器;而在力控制的发展历程中,检测方式也经历了一些变更,在机器人末端加力矩传感器这种方式现在广泛应用于机器人领域。基于检测末端交互力这种方式很直接,即传感器直接检测到与外界环境的作用力信息,配合导纳控制,在机器人领域有很多应用。所以我们采用位置控制结合力控制的柔顺控制方式,建立外环导纳控制结合内环PID控制的策略。
其控制策略示意图如图7所示。通过安置于臂托处的力矩传感器,测量患者的运动意图。通过关节角度传感器和桌面位置传感器,分别测量手臂位置和运行目标位置。然后控制手臂跟随目标轨迹运动。
桌面上肢神经康复机器人可提供3种训练模式,分别是被动、助力和阻抗模式,以分别对应从早期到中晚期的康复训练阶段。机器人可根据患者不同康复时期的实际需求给予相应的助力或阻力,充分发挥其主动参与程度。
3. 控制系统搭建和性能实验
为验证机器人设计思想以及控制算法的有效性,本文制作了机器人实验样机并进行了初步的验证实验。
在Matlab的RTW环境下搭建控制系统,选用合适的数据采集卡(研华PCI1710)、驱动元件(CKD AX2018TS电机)、力传感器(蚌埠天光DYJN-104)、光电位移传感器(木西PM18)等元件与上位机搭建半物理实验平台,并验证其控制策略的有效性和合理性,为后期的性能实验测试提供条件。验证成功后,将控制策略代码化输入到控制器中,基于Matlab/RTW环境的实时控制系统如图8所示。
在位置跟踪测试实验中,设定其被动训练时的循环往复运动为从原点转动100˚且换向停顿时间为1 s。PLC采集数字信息并计算,经数模转换后通过数据采集卡输送至上位机,得到数据如图9所示。
从图中可看出,当目标轨迹到达100˚时跟随轨迹可达98˚,且此时误差最大,仅为2%,可见位置跟随较精确。
在力跟踪测试实验中,为了检测其在交互力方面的跟随性以及交变力方向和大小发生变化情况下的跟随性,预设其系统力矩做斜率不变的变化,范围定为0~1.2 N∙m,所得数据如图10所示。
从图中可知,系统基本能够实现对目标力矩的跟踪,但在交变力方向发生改变时跟踪性略差,误差约为8.4%,后期还需优化。
4. 结论
本文设计了一款基于生物反馈的桌面上肢神经康复机器人,并设计了与之配套使用的移动桌面。本文制作了康复机器人实验样机,并搭建了控制系统,进行了初步的性能实验。通过实时控制实验,位置跟随的最大误差仅为2%,力矩跟随最大误差约为8.4%,证明其性能可以满足使用精度要求。
在后续工作中,我们将在此基础上继续展开研究,进一步优化结构,改进控制方法,开发更多的趣味性训练,争取早日实现上肢康复机器人的实用化。