1. 引言
传统的轨道交通车辆控制功能主要是通过继电器来实现,比如车辆的列车激活、紧急制动控制、停放制动控制、司机室占有等控制电路 [1]。由于轨道交通车辆的功能逐步强大,列车控制系统越来越复杂化,传统的继电器存在老化变形、布线复杂、触点粘连、空间占用较大等问题 [2]。LCU (logic control unit逻辑控制单元)是为地铁车辆的逻辑控制而设计的车载系统,它通过无触点电路替代列车传统有触点的控制电路,实现列车逻辑控制、故障诊断、列车网络通信等功能 [3]。相对于传统的继电器而言,LCU通过无触点控制,且采用双冗余机制,有效提高了列车控制系统的可靠性 [4] [5]。LCU输入输出采用A路、B路热备双冗余机制,每路输出采用双开关控制,具备输入输出独立诊断功能。同时AB板卡进行相关数据同步,使AB板卡进行无缝切换,保证整机的输入信号采集和输出信号控制不受任何影响,除此之外还将此过程的故障信息和同步数据进行记录和存储。武汉地铁16号线采用LCU技术来替代列车原有的部分控制继电器,实现列车的部分控制功能,在应用中发现LCU旁路有效时车辆存在异常限速问题,本文主要针对限速原因进行分析,并给出解决方案。
2. LCU概述
2.1. LCU网络拓扑介绍
武汉地铁16号线车辆LCU采用分布式结构,TMC1、TMC2车各安装一套LCU装置,通过MVB网关与TCMS建立数据连接,两个LCU通过内部CAN网络建立数据连接,同时,连接到以太网维护网络上,便于数据的维护。控制网络拓扑图如图1所示:
2.2. LCU硬件拓扑介绍
LCU采用3U-B机箱,采用热备冗余机制,每一个LCU主机包括2块电源板、2块主控板、3块通信板(MVB、CAN、ETU各1块)、10块数字量IO板(8块DIO板、2块GIO板)、3块接口板,硬件拓扑如图2所示:
LCU整机电气接口主要包含电源接口、IO输入输出接口、MVB通信接口、以太网通信接口、USB接口,均在机箱两端、前部出现,机箱左侧走电源及通信线,IO信号线统一从右侧出线。LCU每个板卡模块带有LED灯,指示工作状态和通道状态。
3. 车辆牵引系统保护原理
武汉地铁16号线关于车辆制动缓解不良有两重保护,防止车辆带闸运行,影响行车安全。
网络保护:网络系统接收LCU传递的所有制动已缓解硬线信号,高电平表示所有制动已缓解,低电平则表示所有制动未缓解。在牵引工况,若网络检测到所有制动已缓解I/O输入信号为低电平,则网络执行速度 > 2 km/h,持续4 s后封锁牵引保护。
DCU保护:DCU接收LCU传递的所有制动已缓解硬线信号,高电平表示所有制动已缓解,低电平则表示所有制动未缓解。牵引工况下,若DCU检测到所有制动已缓解硬线信号为低电平,则DCU执行速度 > 2 km/h,持续4 s后封锁牵引保护。
DCU与网络分别采集硬线信号进行判断,互不影响。正常情况,只要DCU与网络系统任意一方在牵引工况接收到所有制动未缓解低电平信号,则DCU执行速度 > 2 km/h,持续4 s后封锁牵引保护;紧急牵引工况,网络不可用,DCU则根据采集的硬线信号进行判断。
4. 问题描述
在做LCU旁路限速试验时,列车在牵引速度达17~19 km/h时异常触发牵引封锁的条件,无法达到LCU旁路后设计限速值65 km/h,牵引手柄回0位后再牵引,列车速度上升不久再次牵引封锁,以此往复。列车在达到规定限速值前,多次异常牵引封锁。
5. 问题分析
查看异常时刻HMI牵引封锁界面如图3所示,提示“牵引工况下,速度大于2 km/h,4 s内所有制动不缓解”,即列车TCMS判断列车制动未缓解,牵引后4 s触发牵引封锁。
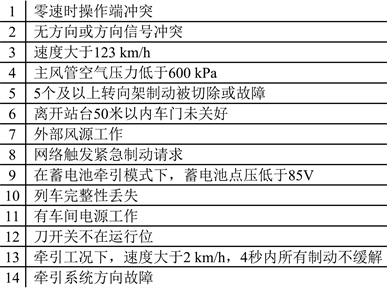
Figure 3. HMI traction blocking interface
图3. HMI牵引封锁界面
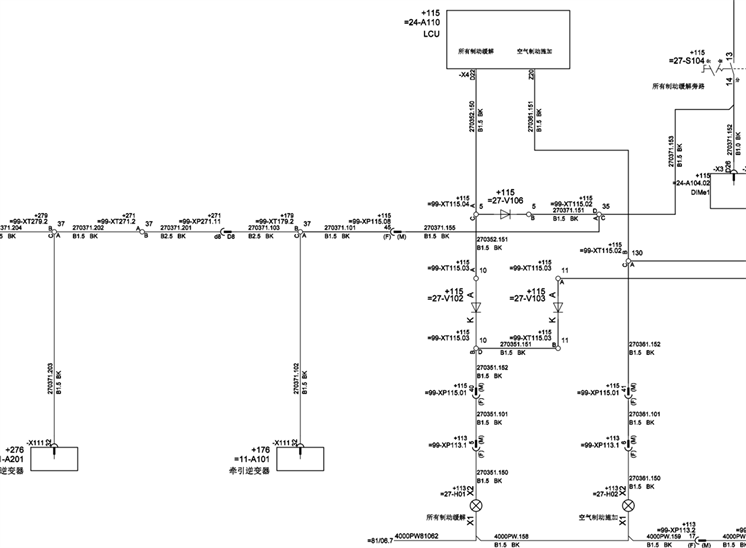
Figure 4. All brake mitigation status outputs
图4. 所有制动缓解状态输出
结合车辆电气原理图,LCU旁路无效时,LCU通过采集停放制动和空气制动的状态进行综合判断,并输出所有制动缓解信号给牵引系统和网络系统,其中高电平为所有制动缓解状态,低电平为所有制动未缓解状态,网络系统和牵引系统分别独立采集所有制动缓解的电平信号并进行判断,若任意一方采集为低电平信号即触发牵引封锁保护。进一步分析TCMS判断列车制动不缓解原因,如图4所示,车辆LCU系统采集到所有制动缓解后,输出模块D22点位通过硬线输出高电平至TCMS系统制动监视点D26和牵引逆变器32监视点以及所有制动缓解指示灯。当LCU旁路旋钮闭合后,列车制动LCU模块始终输出低电平,各节车牵引逆变器32点位和TCMS系统D26点位均采集到低电平,认为列车所有制动未缓解,随即触发当列车速度大于2 km/h,且持续4秒,所有制动缓解信号仍为低电平时的牵引封锁条件,从而施加牵引封锁。牵引手柄回零位后,重新进行判断,直到列车速度提升到65 km/h彻底封锁牵引。
上文已经讲述武汉地铁16号线车辆制动缓解不良有双重保护,当牵引逆变器和TCMS任一系统收到LCU传递的所有制动未缓解时,都会施加牵引封锁逻辑;紧急牵引时,TCMS不可用,牵引逆变器根据制动状态进行判断。
武汉地铁16号线车辆在控制功能上,虽提高了安全防护性能,但是当LCU设备出现其他控制功能或通讯功能故障后,操作了LCU旁路会触发异常限速,影响故障下行车效率。
6. 提出处理方案
在这里提出两种方案,进行比较分析:
1) 车辆不增加硬线
网络系统增加LCU旁路信号给牵引系统,不操作LCU旁路时牵引系统根据硬线信号正常进行所有制动缓解判断,操作LCU旁路时牵引系统不再进行所有制动缓解判断,此时由网络进行判断。网络系统在LCU旁路有效的情况下,通过TCMS综合判断网络模块采集的各车的停放制动和空气制动缓解状态进行判断,不再判断LCU输出的所有制动不缓解硬线信号。网络判断出制动缓解不良时执行速度 > 2 km/h,持续4 s后封锁牵引保护。
紧急牵引情况下,牵引系统根据LCU发送的所有制动缓解硬线信号判断所有制动缓解状态,若LCU被旁路,牵引系统收不到所有制动已缓解信号,以考虑安全为前提,牵引系统执行 > 2 km/h,持续4 s后封锁牵引保护。
通过软件解决LCU旁路时,由于所有制动已缓解信号持续为低电平导致的网络与牵引系统执行 > 2 km/h,持续4 s后封锁牵引保护,速度无法达到限速值65 km/h。虽然不需要增加硬线,但DCU需要的LCU旁路信号依靠网络转发,失去了牵引系统和网络独立冗余判断的功能。
2) 车辆增加一根LCU旁路硬线给DCU
在网络与LCU均正常的情况下,网络系统和牵引系统独立采集所有制动缓解信号,并独立进行判断。操作LCU旁路旋钮时,所有制动缓解信号持续为低电平,DCU不再判断LCU输出的所有制动不缓解硬线信号,由网络进行判断。网络在LCU旁路的情况下,通过TCMS综合判断网络模块采集的各车停放制动和空气制动缓解状态进行判断,网络判断出缓解不良后执行速度 > 2 km/h,持续4 s后封锁牵引保护。
紧急牵引根据LCU发送的所有制动缓解硬线信号,正常进行制动缓解状态的判断。若LCU被旁路,牵引系统收不到制动已缓解信号,以考虑安全为前提,牵引系统执行速度 > 2 km/h,持续4 s后封锁牵引保护。
此种方案只需要增加一条LCU旁路列车线给DCU,在网络与LCU均正常时,独立进行判断,LCU旁路时由网络进行判断。改动较小,在网络与LCU均正常时保证了冗余有效性,在LCU旁路时,DCU依靠网络系统执行保护。
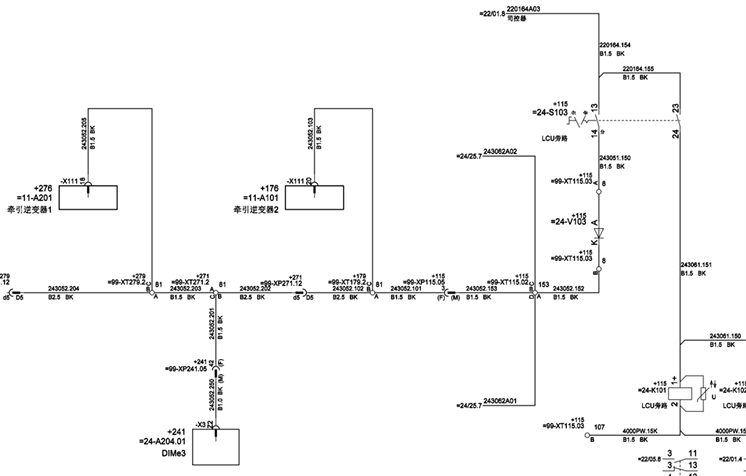
Figure 5. Adding LCU bypass hardwire signals
图5. 增加LCU旁路硬线信号
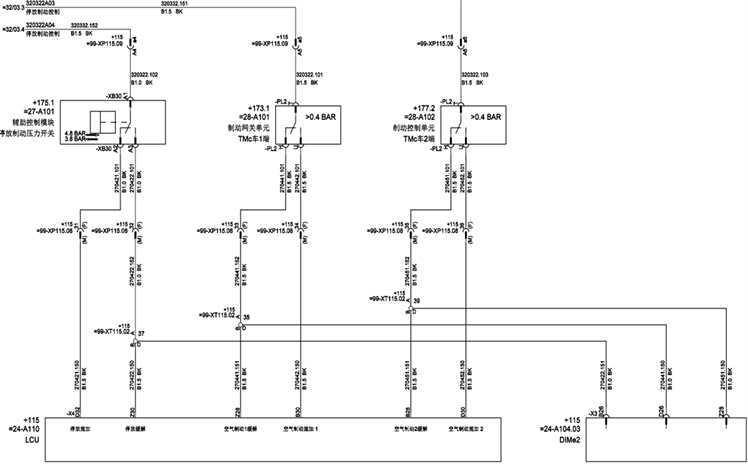
Figure 6. Parking brake and air brake status collection
图6. 停放制动和空气制动状态采集
7. 确定处理方案
通过比较,可以看出通过增加硬线来改善控制功能的方案较为合适,这里对此方案进行重点分析。车辆增加一根LCU旁路硬线,传递给牵引逆变控制单元,如图5所示。
1) TCMS和LCU系统正常时,TCMS和牵引逆变器分别采集所有制动缓解信号,独立进行判断。
2) TCMS正常,LCU旁路闭合时,所有制动已缓解硬线为持续低电平,DCU不再判断LCU输出的所有制动不缓解硬线信号,由网络进行判断。如图6所示,网络系统在LCU旁路的情况下,通过TCMS综合判断网络模块采集的各车停放和空气制动缓解状态进行判断,网络判断出制动缓解不良后执行速度 > 2 km/h,持续4 s后封锁牵引保护。
3) 当TCMS、LCU双重故障,同时操作紧急牵引和LCU旁路后,以安全为前提,牵引系统执行牵引封锁逻辑。
8. 结束语
项目使用LCU替代部分继电器后,会出现旁路有效时车辆异常限速的问题,文中通过分析提出增加LCU硬线信号给DCU的方案来解决问题,当旁路无效时TCMS和牵引逆变器分别采集所有制动缓解信号独立进行判断,旁路有效时牵引系统不再处理所有制动缓解信号,由网络系统综合判断各车的停放制动和空气制动状态来决定是否进行封锁保护。