1. 引言
酶联免疫吸附试验(ELISA)由于测定灵敏度高、特异度高、操作简便、酶标记试剂比较稳定、无放射性污染、易于自动化,且易与其他相关技术偶联,使其成为目前应用最广泛而且发展最快的一种免疫测定技术 [1]。
全自动酶免工作站以操作简单、快速检测、结果准确等优点,实现了ELISA分析的自动化、标准化、快速化、网络化,逐渐在全国各大医院使用 [2]。
全自动酶免工作站是中文智能系统,操作简单;4根采样针采样,2台16通道洗板针洗板,提高检测速度;一体式反应体系,使常规ELISA的试剂管开盖、加样稀释、移液、孵育、振荡、洗板、读数分析功能在同一操作体系中分别进行,增加结果准确度;设置程序操作快速简单,可按说明书设置开展所有ELISA项目;避免人工加样错误,同时也降低检验人员感染的概率 [3]。
由于ELISA实验检测项目以及工艺不同,检测的流程以及机器在各时间点位到达的位置不一样,会导致设备在工作过程中部分检测模块运行有冲突,一部分模块在闲置,一部分模块重复运行,如何更好地优化检测项目的优先级,用最快最完善的方案来完成检测,是我们目前需要解决的问题。
使用混合蚁群系统算法优化全自动酶免工作站的路径规划,可以使全自动酶免工作站各个子模块以更密切、更高效的配合来完成设定的各项酶联免疫检测工作。
2. 全自动酶免工作站
全自动酶免工作站,主要包括2个加样臂、12个孵育震荡工位、1个智能夹爪拧盖旋转机构、192个标本试管位,6个试剂位、5个TIP头载架工位、2台洗板机、1台酶标仪等主要结构,结构图如图1所示。
2.1. 加样模块
加样臂的主要工作是根据用户在软件中设定的程序执行液体分配。
在仪器运行时,加样臂各加样通道可在X、Y、Z三个方向灵活的运动,运行液体分配。
抓手的主要工作是根据实验需要在微板位、洗板机、转板器、酶标仪和废板位之间转移微板,在微板位与孵育盖位之间转移孵育盖。配备高灵敏度的光电感应器,可检测微板或孵育盖是否抓取成功。
2.2. 孵育模块
在孵育模块的同一位置上实现微板的加样、振荡混匀、孵育,节约微板转移的时间,提高检测速度。每个孵育位独立温控,孵育时自动加盖封闭避光。孵育器的主要功能是放置微板以便标本和试剂分配;在完成标本和试剂分配后振荡混匀;当微板需要孵育时,根据用户软件的程序设定进行控温孵育。孵育温度可在室温到60℃之间设定。
2.3. 智能夹爪拧盖旋转机构
智能夹爪主要由手部、运动机构和控制系统三大部分组成,如图2所示:
2.3.1. 手部
手部是用来抓持样本瓶盖的部件,包含夹爪、夹爪外框架、夹爪电机等部件组成,通过上位机参数设置软件将指令下发给控制器,控制器控制电机运行,从而驱动夹爪,实现夹爪径向伸缩,相对于气动以及液压传动的夹爪,电动夹爪位置和夹持力精准。
夹持力的计算
酶免工作站用智能夹爪采用无夹持力传感器方案,夹爪电机的电流和电机输出的扭矩成正比的线性关系,便可通过电机反馈的电流值的大小换算出当前时刻电机的输出扭矩。
智能夹爪的夹持力:
(1)
输出扭矩:
(2)
由(1) (2)式可得智能夹爪的夹持力
[4] (3)
其中
为电机转矩常数,
为电机反馈的电流,
为智能夹爪夹持力与电机反馈电流
的比值系数。
2.3.2. 运动机构
运动机构包含3个电机、导轨固定座、齿轮以及同步带等部件构成,通过不同的电机可使手部完成旋转、水平以及竖直方向的往复运动,在完成旋转开盖功能的基础操作上,同时能够在立体空间内自由运行。
将电机的速度信号之间的误差以及误差变化率作为输入量,通过模糊规则生成控制信号,传递给被控制对象,该控制方法响应速度快,稳定性好。
2.3.3. 控制系统
由于实验检测项目以及工艺不同,检测的流程以及机器在各时间点位到达的位置不一样,会导致设备在工作过程中部分检测模块运行有冲突,一部分模块在闲置,一部分模块重复运行,是基于混合蚁群系统算法通过对夹爪每个自由度电机的控制,来完成特定动作和调度,同时依靠接收传感器反馈的信息,形成稳定的闭环控制。
2.4. 洗板模块
2台洗板机位于仪器平台的最前端,便于用户在洗板时监测洗板头是否有堵针,注液、吸液是否流畅。洗板机的主要工作是洗涤微板。洗板机的托盘与微板位的方向一致,方便抓手抓取和放置微板。可拆卸洗板头包含两排吸液针和两排注液针,每排8针,共16个洗涤通道,可同时洗涤微板中的16个孔。洗板机工作时需要洗液瓶和负压泵配合。在洗板机启动时,自动启动负压泵。负压泵工作时,抽取废液瓶中的空气,使废液瓶内形成负压环境,废液瓶通过废液管抽取洗板头内的液体。当洗板机停止工作时,负压泵停止工作,废液瓶内的废液通过单向阀排放到废液桶中。
2.5. 酶标仪
BIOBASE8001酶标仪具有精确度高,判读速度快等优良特性。
酶标仪有4个波长滤光片可选:405 nm (340 nm)、450 nm、492 nm、630 nm,用户可根据需要选择双波长或单波长判读。
2.6. 标本试管架模块
标本试管架的主要功能是放置标本试管。标本放在单条试管架上,每条试管架最多放16个标本,总共可以放置192个标本。
3. 系统算法——混合蚁群系统算法
将全自动酶免工作站与混合蚁群系统算法相结合,可使全自动酶免工作站各个子模块配合更加密切、效率更高,该算法基于经典的蚁群算法,可以对转移概率进行调整并充分控制信息素强度,在规划初期不会盲目搜索,保证了全局搜索效率和能力。结合粒子群算法的蚁群粒子群算法,其充分发挥了粒子群算法结构简单的优势,获取初始信息素分布,有效的提高了收敛速度。对于路径规划问题,还可以采用自适应搜索半径蚁群路径规划算法,可以随着环境复杂的程度将寻优半径自动调整,提高收敛速度的同时,保证了全局搜索能力。利用混合蚁群系统算法对于多目标点问题,可以在很短的时间内规划出最优的遍历路径 [5]。
3.1. 原理
各个蚂蚁在没有事先告诉他们食物在什么地方的前提下开始寻找食物。当一只找到食物以后,它会向环境释放一种挥发性分泌物pheromone (称为信息素,该物质随着时间的推移会逐渐挥发消失,信息素浓度的大小表征路径的远近)来实现的,吸引其他的蚂蚁过来,这样越来越多的蚂蚁会找到食物。有些蚂蚁并没有像其它蚂蚁一样总重复同样的路,他们会另辟蹊径,如果另开辟的道路比原来的其他道路更短,那么,渐渐地,更多的蚂蚁被吸引到这条较短的路上来。最后,经过一段时间运行,可能会出现一条最短的路径被大多数蚂蚁重复着。
3.2. 局部启发式函数设计
基本蚁群算法是一种基于种群的启发式仿生进化算法,可以利用该算法实现寻找地图中的优化路径,也可以用来解决各种其他优化问题。本文在基本蚁群算法的基础上改进了启发式函数的设计。启发式因子
反应信息素对蚂蚁的影响程度,
的值越大,蚂蚁会以更大的可能性选择之前走过的路线,全局搜索的能力便越弱,相反,
的值越小就会使蚁群过早的陷于局部最优,期望启发因子
反映了路径长度的重要性,
的值越大,蚂蚁在局部某点选择短距离路径的概率越高,该方法能够加快算法的收敛速度,但是会损失算法的随机性,容易陷入局部最优解,相反,
的值越小,蚂蚁会进行单纯的随机性搜索,寻找到最优解的概率很低,因此需要正确的选择参数
和
,才能够保证算法的收敛速度和稳定性。
蚂蚁k在路径中行走时,信息素的量
和到下一个节点的期望程度
综合影响搜索的概率
,通过概率计算函数的处理,可以使距离越近的节点被选中的概率增大,让每只蚂蚁向着终点前行。
(4)
对于基本蚁群算法,
,为了使算法具有较高的随机性,提高全局搜索能力,本文选择
如公式(2)所示。
(5)
其中
(6)
从式中可以看出局部路径越差,其越不容易被选中,因此算法出现极小值可能性较大,提高选择多样性,将
设置成常量,即
,这样即使路径较差,也有一定概率被选中,可以保证算法不会过早的出现局部最优解的情况。
通过
表来记录蚂蚁在行走过程中经过路径的节点序号,并在完成一次循环后记录这只蚂蚁路径的长度。
3.3. 信息素更新
本文将
设置成常量,初始化时,将按照局部路径在其相关联路径长度比重进行分配,这样可以显著提高初期算法的搜索速度。
(7)
在所有蚂蚁完成一次行走时,需要对相应蚂蚁走过的路径信息素进行重新调整。在蚂蚁进行一次循环以后,将出现一个最好解和一个最坏解,寻找接近最好解的蚂蚁,选择条件如公式(8)所示。
(8)
对需要更新信息素的路径,对所有满足条件的路径信息素进行更新如公式(9)所示。式(9)中
为信息素系数,
为当前路径上信息素的量。
(9)
其中,
(10)
式(10)将各路径附近范围内的所有路径信息进行更新。
3.4. 混合蚁群系统算法原理流程图
本文提出的混合蚁群系统算法原理流程图如图3所示。
3.5. 混合蚁群系统算法求解
将优化调度模型带入图3 (混合蚁群系统算法原理流程图)中,可得求解步骤为:
1) 对算法中所有的相关参数进行初始化;设定基本参数,如蚂蚁数目,迭代次数,初始化信息素等。
2) 根据公式(7)初始化阶段,分配所有路径的信息素。
3) 所有蚂蚁依据概率公式(4)选择行走的路径,与此同时需要更新UK表。
4) 重复运行步骤3,每一只蚂蚁均完成一次循环,并按照公式(9)完成全局信息素的更新操作。
5) 循环次数增加1次,重复进行步骤3和步骤4,一直循环至总循环次数,并输出最终结果。
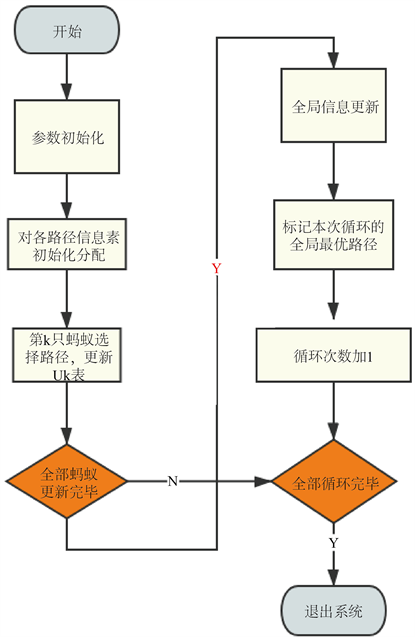
Figure 3. Flow chart of hybrid ant colony system algorithm
图3. 混合蚁群系统算法原理流程图
4. 实验验证
4.1. 仿真实验与结果分析
设定基本参数,如蚂蚁数目
,最大迭代次数
,信息启发算子
和期望值启发算子
,初始化信息素强度
,信息素残留算子
等,应用混合蚁群系统算法得到复杂地图规划路径(图4)和算法收敛图(图5)。
4.2. 算法验证
由上述条件,结合实际检测情况,我们可得出:整个检测过程所需的总时间即为所有单个检测项目完成所需时间的最大值。
混合蚁群系统算法求解完成后,将算法编入程序中,运行仪器以及上位机软件程序,查看其运行实验时的调度情况,验证算法是否可行。
图6为设定两个实验并行时,上位机软件调度后的结果图。由此图以及实验设定可得,运用该算法后,可以优化软件运行调度,合理安排不同实验间的调度顺序,更好的完成相关检验工作。
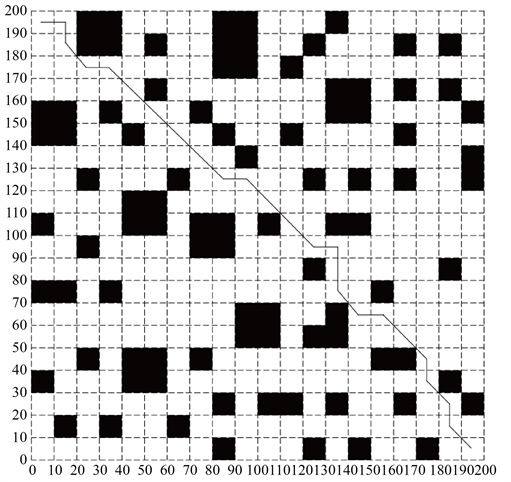
Figure 4. Hybrid ant colony system algorithm complex map planning path map
图4. 混合蚁群系统算法复杂地图规划路径图
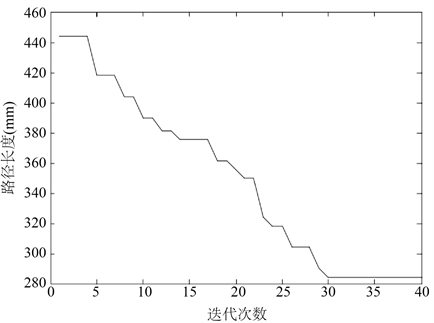
Figure 5. Convergence diagram of hybrid ant colony system algorithm for complex map programming
图5. 混合蚁群系统算法复杂地图规划收敛图
4.3. 实验验证
实验验证运行进度图如图7所示:
每一个进度条代表一个项目,进度条上的各种颜色代表该项目运行检验的各个步骤,在进度图上的颜色注释中有对应的解释。进度条前面有对应的微板编号和项目名称。在进度图右下方显示有实验总耗时和实验预计结束的时间。
通过全自动酶免工作站实际验证机器实验总耗时与预计结束时间相符,将混合蚁群系统算法求解完成后编入程序中,可以优化软件运行调度,合理安排不同实验间的调度顺序,能够更好地完成相关检验工作。
5. 结语
本文以现有全自动酶免工作站为基础,在结构上采用智能夹爪自动开盖技术,旨在降低操作人员的劳动强度、提高操作的安全性;混合蚁群系统算法对全自动酶免工作站的路径规划问题进行了研究与分析,该算法在标准蚁群算法的基础上改进了蚂蚁路径的选择方式和信息素的跟新规则,以更快的收敛速度和更高的随机性,将全自动酶免工作站与混合蚁群系统算法相结合,使全自动酶免工作站各个子模块配合更加密切、效率更高,并且通过机器进行了仿真实验和模拟实验验证了该设备的可行性。
参考文献