1. 引言
对于水冷壁爬壁机器人而言,吸附性能既是爬壁机器人能够搭载其他测量器件的充分条件,又是保证机器人在复杂表面移动的必要因素。永磁吸附装置广泛应用于爬壁机器人,目前常用的磁吸附装置包括磁性履带、磁性轮以及磁吸盘等 [1]。大多数磁吸附装置采用基于Halbach永磁阵列结构的设计,为了更好地产生聚磁效应,文献 [2] 设计了一款磁力吸附组件,克服Halbach阵列端部效应带来的漏磁问题以及方便磁吸附单元的安装,在直线型Halbach阵列的两端和弱磁场强度一边增加了适量软铁,使得阵列一边磁场显著增强另一边显著减弱,容易得到在空间中较理想正弦分布的磁场;文献 [3] 介绍了一种可变磁力的结构,吸附单元的外形受永磁体形状和与履带连接关系的限制,根据履带联接链节的尺寸和具体应用情况设计了变磁力吸附单元的结构;文献 [4] [5] 讨论了不同的磁铁结构磁吸附力情况,通过计算不同气隙高度时磁能密度值情况研究出磁能利用率更高的结构,对比了几种不同磁路设计提出了改进型磁吸盘结构。本文结合文献以及实际应用场景,设计了一种基于磁性轮永磁吸附的爬壁机器人,结合文献 [6] 分析了爬壁机器人在壁面的受力情况及爬壁机器人实现安全可靠爬行需满足的条件,结合文献 [7] [8] [9] [10] 对影响磁性轮磁吸附力的主要因素进行分析,以最小磁吸附力大于机器人载荷为设计原则,通过仿真分析优化磁性轮结构,降低爬壁机器人在水冷壁管不同位置时的磁力波动,在实际水冷壁壁面进行测试,实现了稳定的吸附和爬行。
2. 爬壁机器人受力分析
本文设计的轮式水冷壁爬壁机器人如图1,包含轮式小车和机械臂两部分,其中磁吸附结构采用四组磁性轮对称安装在小车两侧,由直流电机进行驱动,车身使用铝合金材料,减轻整体重量又能保证强度,减少腐蚀,提升负载量,爬壁机器人参数如表1所示。
水冷壁为排管焊接结构,为保证爬壁机器人在水冷壁壁面爬行过程中安全可靠稳定,建立爬行过程中需要满足的边界条件如下:1) 爬壁机器人能够沿壁面行走而不产生滑移;2) 爬壁机器人能够沿壁面行走而不发生倾覆。基于以上边界条件,讨论爬壁机器人垂直运动和水平运动的受力情况。
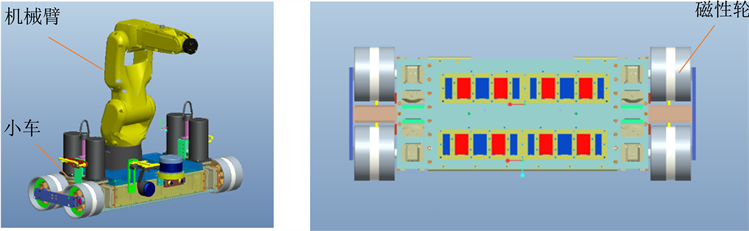
Figure 1. Structure of the wall climbing robot
图1. 爬壁机器人结构

Table 1. Parameter table of wall climbing robot
表1. 爬壁机器人参数表
爬壁机器人吸附在水冷壁上进行垂直运动,处于静止状态时受力分析如图2所示,图中使用的标识对应表1中的符号,其中Fm为磁力模块总吸附力,f1、F1表示前轮摩擦力和支持力,f2、F2表示后轮摩擦力和支持力。
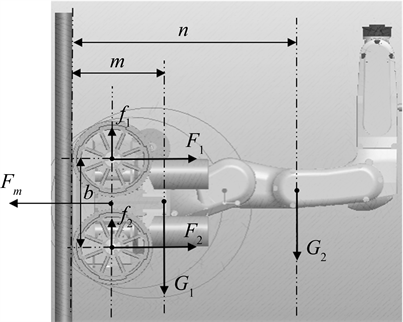
Figure 2. Force analysis of vertical motion of wheeled wall climbing robot
图2. 轮式爬壁机器人垂直运动受力分析
所有磁力模块吸力为前轮与后轮支持力之和
(1)
总静摩擦力为前轮与后轮摩擦力之和,同时满足摩擦力公式
(2)
为满足爬壁机器人不出现滑移条件,总静摩擦力需要大于总重
(3)
为满足爬壁机器人不发生倾覆的条件,由力矩公式可得
(4)
由式(1)(2)(3)(4)联立可以计算得到磁吸附力,带入表1中的机器人参数可得
(5)
轮式爬壁机器人在水冷壁管道上水平运动时受力分析如图3所示,其中w表示车身横向长度。

Figure 3. Force analysis of horizontal motion of wheeled wall climbing robot
图3. 轮式爬壁机器人水平运动受力分析
显然不出现滑移的条件同公式(3),而水平运动时不发生倾覆的条件则变为
(6)
由于车身长度w远大于轮间距b,因此Fm满足公式(4)则一定满足公式(6)。综上,要保证爬壁机器人在水冷壁壁面爬行时安全稳定,需要满足磁吸附力Fm大于3875 N,由于机器人为四轮驱动,每个磁性轮提供的磁力应当大于968.75 N,下文也将以该值为设计原则进行磁性轮结构优化仿真。
3. 磁性轮磁力仿真
磁力仿真实验使用的材料如表2。
Table 2. Material list of simulation experiment
表2. 仿真实验材料表
影响磁性轮磁吸附力的主要因素包括:
1) 车轮轮径,轮径大,机器人重心离壁面越大,倾覆力矩也越大,有坠落风险,但轮径过小在水冷壁管上的投影面积小,由于水冷壁管厚度5 mm,容易磁饱和,通过磁的面积小则磁力小。难以支撑机器人;
2) 车轮宽度,在非磁饱和情况下磁力总体与磁铁体积正相关,车轮越宽可以获得更大磁吸附力,但质量会增大同时转向摩擦力也越大,降低灵活性,但车轮过窄又导致吸附面较小磁力不足,由于水冷壁管壁面不平整,需要保证车轮宽度至少横跨两跟水冷壁管;
3) 轭铁厚度,轭铁的作用是聚集磁力线,在一定程度上可以增加磁力,太薄容易磁饱和,太厚则会增大车轮质量;
4) 气隙,气隙可以防止磁路饱和,但需要更大的磁场强度来得到同等磁感应强度,选择合适的气隙参数才能避免磁饱和的同时不影响磁感应强度。
实验使用的磁性轮模型如图4,为左右对称结构,磁铁位于中间部分,车轮两侧由轭铁包裹,其中Q3表示外轮轮径,气隙由(Q3-Q2)/2计算可得,Q1表示内轮轮径,W1为车轮两侧宽度,W2为中间磁铁部分宽度,E1表示车轮两侧轭铁厚度,E2表示中间靠近磁铁部分轭铁厚度。
使用Ansoft Maxwell软件对磁性轮参数进行仿真分析,由图5可以看出,靠近磁铁的轭铁部分比两侧的轭铁磁感应强度低,这是由于中间部分轭铁是轴向传导磁力,与磁铁接触面积大,两侧部分轭铁是径向传导到水冷壁管,只有接触水冷壁管的那部分有磁力线,实际接触面积较小,容易发生磁饱和,在经过仿真后发现当E2取6 mm时不会磁饱和,后续实验将固定E2为6 mm,而E1的取值则至少为6 mm。

Figure 5. Magnetic force simulation of magnetic wheel
图5. 磁性轮磁力仿真
固定轮径为
,
,
对不同宽度的磁性轮进行仿真实验,观察磁力随轭铁厚度E1的变化情况,绘制成曲线如图6,其中968.75 N是上文受力分析得出的最小吸附力。
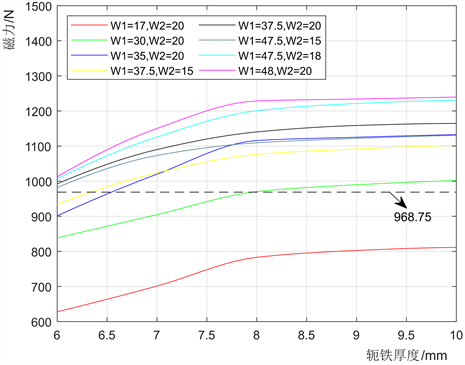
Figure 6. Variation of magnetic adsorption force with wheel width and yoke thickness
图6. 磁吸附力随轮宽、轭厚参数变化规律图
从图中可以看出,当两侧轭铁的厚度由6 mm变化到8 mm时,磁吸附力随着轭厚的增加而增大;当轭厚超过8 mm后,其磁吸附力变化趋势减弱,考虑永磁吸附装置的优化准则,选取两侧轭铁的厚度为8 mm。同时可以看出,固定
,随着磁铁宽度W2的增加磁力会有部分提升但不明显,取W2为20 mm、W1大于35 mm即可提供大于968.75 N的磁力,两侧宽度W1的增加对磁力的提升有显著效果,当W1增加到48 mm以上磁力提升趋势变缓,综合考虑以后确定
,
。
固定
,
,
,
取不同轮径磁性轮进行磁力仿真比较,数据记录于表3,可知
,
,
时磁力最大。
Table 3. Variation of magnetic adsorption force with wheel diameter parameters
表3. 磁吸附力随轮径参数变化表
4. 实验论证
经过仿真分析对磁性轮结构参数进行优化,最终选用
,
,
,
,
,
,
规格参数制作出磁性轮实体安装在爬壁机器人上,在单管直径44.5 mm,管厚5.5 mm的水冷壁壁面上搭载重量25 kg的机械臂进行实验,如图7所示垂直运动和水平运动均未发生滑移和倾覆现象。使用分辨率为0.1 N的拉力传感器沿平行于壁面的方向向下拉爬壁机器人拉力达到860 N方可使前轮离开水冷壁,向上拉爬壁机器人,拉力达到4000 N机器人后轮离开水冷壁,可判断其搭载能力超过80 kg。爬壁机器人吸附在壁面上处于静止状态施加重物,重物质量达到80 kg时依然不发生滑移和倾覆情况,吸附性能优越,设计出的爬壁机器人安全可靠。
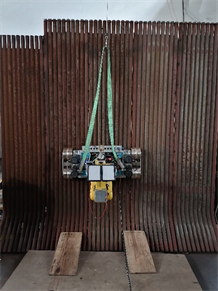
Figure 7. The wall climbing robot moves on the water wall vertically (left) and horizontally (right)
图7. 爬壁机器人在水冷壁上垂直运动(左)水平运动(右)
5. 结论
为了实现一款能够搭载机械臂等设备进入炉膛进行检修工作的爬壁机器人,本文对机器人受力、磁性轮结构参数进行了研究,分析了影响磁力的相关因素,利用有限元方法建立磁性轮模型,通过仿真计算分析相关因素对磁力大小的影响,研究发现轭铁厚度在一定范围内对磁吸附力有明显增强作用,超过范围则影响变弱,磁性轮轮面宽度和磁铁宽度对磁吸附力有明显影响,选择合适的宽度配置能使磁性轮获得更好的磁吸附特性,磁性轮内外轮轮径同样影响磁吸附能力,合适的气隙可以保证磁性轮不发生磁饱和且磁感应强度最大化,本文提出的仿真对比实验方法可以有效地完成爬壁机器人磁吸附结构设计,经由仿真实验获得最合理的磁性轮结构参数,加工出对应的工件安装在爬壁机器人上,经过实际水冷壁爬行验证了本文设计的磁吸附结构足够稳定可靠,搭载30 kg以内的设备在水冷壁上进行全方位爬行,无滑落倾覆情况,可以安全可靠地进行炉膛检修工作,具有广阔的市场前景。
NOTES
*通讯作者。