1. 引言
随着数字交通领域的迅猛发展,传统导航地图在内容完整度、要素颗粒度以及数据精度等方面,开始无法满足诸如智能交通管理、无人驾驶控制等更高层次的应用需求。高精地图概念逐渐被提出并得到广泛认可 [1] [2]。同时,随着数字孪生 [3]、智慧城市 [4]、智能驾驶等技术的发展,地图需求开始从二维道路级地图向三维车道级高精地图转换。为满足交通地图关于仿真、测试、信息交互等新技术的需求,以及智能三维城市数字一体化的建设需要,高精地图的三维可视化构建正成为研究热点。
目前,对于道路高精地图的研究,主要集中在场景多源数据采集 [5]、高精地图要素识别 [6] [7]、高精地图数学模型 [8] 以及高精地图应用几个方面。其中,数学模型研究集中于要素的精细化表达,分别对要素自身几何及属性,以及要素间关系进行构造 [9]。地图应用则分化出“互联网+”,无人系统以及众包地图等实际场景研究 [10]。依托不同的模型及应用,高精地图成品应运而生,多为数据库模型和解析性字段,可视化职能较弱,搭载的三维场景主要存在于无人车算法的仿真测试 [11] [12] 以及虚拟引擎集成 [13],场景效果相对粗糙,所建外观多为简单的几何线形,道路标志以符号表示,可视化效果与真实场景差别较大。
而在传统三维道路场景建模方面,道路模型的构建往往作为整体城市的一部分。有以路网为基础的批量三维道路构建方式 [14],此类方法以城市道路路网为道路骨架,使用贴图方式完成路面标志表达,建模效率快,但贴图精细度较弱,且大多为平面道路,不能体现道路的起伏空间变化和道路截面形态;也有结合三维地形数据的搭建方式 [15],此类方式通过提取地面高程数据构建道路几何,对边坡明显的道路构造效果较好,对于城市平面道路构造能力有限;还有针对小场景的全息精细外观建模方法 [16],此类方法依托诸如点云的精细化数据源,手工进行部件构建拼装,建模精度高,但成本较高,效率较低。
本文提出了一种基于道路高精地图数据的三维建模方法。利用高精道路地图数据,涵盖中心线、轮廓线以及标线交通设施建模,相较于仅使用路网数据的方法 [17] 更加精准,避免贴图 [18] 对于路面标识建模的精度损失。方法基于BIM (Building Information Modeling)建模中部件装配的思路,对道路路段、标线以及设施采取先部件再组装的方式,建模策略更加灵活,丰富了可建模场景范围。
2. 道路高精地图的三维建模
本文提出的道路高精地图三维建模方法,以道路高精地图数据为基础,分为数据预处理和建模两个阶段,整体流程如图1所示。
预处理阶段通过坐标投影变换和基准点设置,使高精地图数据满足建模需求。建模阶段借鉴BIM语境下的三维建模场景方法,针对不同的对象要素分别设计建模方法,包括道路体建模、标线建模及道路附属设施建模三部分。对于道路体建模部分,分为具有固定横截面设计的规则外形道路和不具有规范俯视视图外形的不规则道路两类,分别进行平纵横建模以及外轮廓建模;其次,对于标线体建模,以空间交集计算为核心,分别为线状标线以及非线状标线制定建模策略;最后,对于道路设施建模,按照同类型的独立模型参数化控制三维外观,结合设施所处位置批量实现建模及模型对齐。
2.1. 道路高精地图数据预处理
道路高精地图数据一般由道路中线、边线、标志、标线、附属设施等组成,为满足建模要求,需对数据进行预处理,主要包括坐标系转换和基准点设置变更。
地图数据一般以WGS84或CGCS2000的地理坐标形式存储,本文采用左手坐标系XYZ作为三维建模坐标系,因此需要完成地理坐标系向建模坐标系的转换。首先,利用高斯投影对地理坐标系下的地图数据进行投影,获得高精地图数据的平面投影数据。然后,考虑到道路场景的对象之间存在高差,将地理坐标系下的高程值h直接用作建模坐标系的z坐标值。
基准点变更是为了能够在建模视图正中展开建模,本文采用中心化算法,通过获得道路数据在建模坐标系XYZ中三维度内的极值
,
,
,确定该数据的中心点位置
,如式(1)。基于
位置进行偏移,完成道路高精地图数据的中心化。
(1)
2.2. 道路体对象三维建模
道路体对象是指除去路面标线以及路侧附属设施的纯道路外轮廓三维对象,在实际场景中,因不同的功能和建造环境呈现多种外形。本文将其分为里程较长、外形较为规范的规则外形路段,以及里程较短、外形不规范的不规则外形路段两类,分别采用基于道路中心线/横截面的平纵横方法,以及基于道路外轮廓的方法进行建模。
在实际建模中,可针对不同的场景选择不同的方法进行分路段的建模,利用此两种道路场景的组合可满足多样路段场景的三维建模。
2.2.1. 基于平纵横的规则道路体三维建模
规则外形道路是指在俯视视角下可以使用长条形外形进行描述,并且具有规则几何横截面的路段,此类道路里程较长,横截面可几何描述,例如:城市公路的大部分路段、城际高速路、高架桥、普通桥梁路面等。
本文提出了基于道路中心线/横截面的平纵横建模方法,利用中心线数据对道路的空间形态进行描述,使用参数化后的横截面对道路的三维外形进行表达。
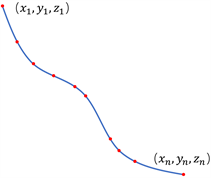
道路中心线是指位于路宽正中的形态线信息,反映了道路的空间走向,可表达为
(如图2(a))。道路横截面是指与中心线相互垂直的道路截面,该截面的几何外形可参数化描述。
 (a) 中心线数据
(a) 中心线数据 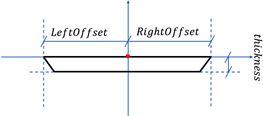 (b) 参数化示例
(b) 参数化示例 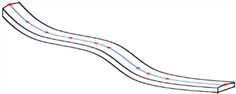 (c) 立体构造建模
(c) 立体构造建模
Figure 2. Schematic diagram of horizontal and vertical road modeling
图2. 平纵横道路建模示意
为完成参数化,本文以横截面所在平面为设计平面,以道路中心线上的某点数据作为基准点(如图2(b)红色圆点),对横截面几何形状的进行轮廓线勾勒定制(如图2(b)黑色线条),得到以中心线点数据为基准的固定横截面数据结构
。其中,
为基准点坐标,
为横截面参数列表。若中心线上的点数据为n个,经参数赋值,可得到n个固定形状的道路截面对象
,
。以道路场景常见的双幅式路面为例(如图2(b)),该类路面截面的参数化模型可表达为
。
通过横截面间的立体构造,可完成道路体建模。以第i个和第
个中心线点控制的横截面为底面,以两点间的中心线为骨架,构建立体对象,可得到
个三维体,将其合并即可完成道路路面的外形三维建模(如图2(c))。
2.2.2. 基于外轮廓的不规则道路体三维建模
不规则道路是指在俯视视角下外轮廓持续变化的路段,此类路段无法使用长条形几何形状进行描述,里程相较于规则路段较短,例如:环岛道路,多条道路的汇总缓冲路段,交叉路口,存在景观嵌套的异形道路等。本文提出基于道路外轮廓线的建模方法,使用道路外轮廓线数据进行三维建模。
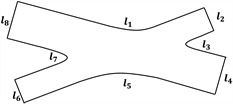
设道路轮廓线数据为
(见图3(a)),将其合并得到空间闭合线框并建立空间曲面
,结合道路厚度t将该空间面进行纵向拉伸,能够实现不规则路段的三维建模,图3为两道路交叉处路口的建模过程示意。
 (a) 外轮廓线数据Lr
(a) 外轮廓线数据Lr 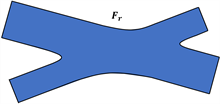 (b) 轮廓线框生成面Fr
(b) 轮廓线框生成面Fr  (c) 增加道路厚度t生成体
(c) 增加道路厚度t生成体
Figure 3. Road contour modeling based on road contour
图3. 基于道路外轮廓线的道路外形建模
2.3. 标线对象三维建模
标线对象是指划设于道路表面,用于表达道路属性、通行规则的对象,具有扁平状三维外观,纵向厚度取决于标线制作工艺的喷涂情况。为了构建出贴合路面的标线体对象,本文采用空间交集概念,完成线状标线与非线状标线的建模。
2.3.1. 基于空间交集的标线建模
厚度控制体和超厚标线体是标线建模的基础。其中,厚度控制体指以道路体上表面(路面)作为起始表面,向上拉伸标线厚度
的空间三维体(如图4(a)),
取标线喷涂厚度。超厚标线体是指以标线轮廓为底面形状,能够与厚度控制体产生空间交集的空间三维体(如图4(b)),不同标线对应的超厚标线体的构造方式不同。
通过构建厚度控制体
和超厚标线体
,计算并拾取空间交集
,可完成标线的建模。
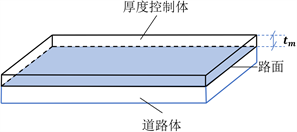 (a) 厚度控制体
(a) 厚度控制体 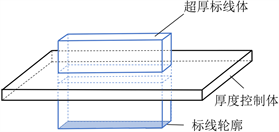 (b) 超厚标线体
(b) 超厚标线体
Figure 4. Marking modeling based on spatial intersection
图4. 基于空间交集的标线建模
2.3.2. 线状/非线状标线的超厚体构建
超厚标线体是控制标线建模外形的关键,根据外形特点,本文的超厚体构造分为线状标线(如实线、虚线、双线、虚实线等)和非线状标线(如箭头、导流带、斑马线、路面文字等)两种。
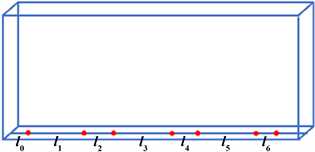
1) 线状标线的超厚体建模
线状超厚体以除去高度信息的标线中心线数据为底面依据,结合厚度控制体的空间位置,确定底面位置以及拉伸高度。
实线的超厚体是所有线状超厚体的基础形式,在建模坐标系XYZ中,为中心线数据在Z方向构建高度
,
小于路面高度
,确定底面位置;附加标线宽度
,得到实线的外轮廓,生成底面对象;将该底面向上纵向拉伸s,
,使生成的超厚体上表面穿过路面高度
,保证超厚体与路面控制体的空间交集关系(如图5)。
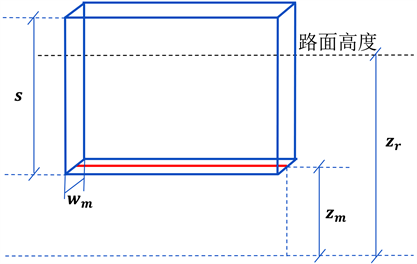
Figure 5. Structure of solid line super thick body
图5. 实线超厚体的构造
虚线的超厚体在实线超厚体的基础上构造,利用虚线的线段间隔确定多个切割面,通过切割实线超厚体以及空档位去除,完成虚线超厚体建立。
切割面是指与虚线中心线呈垂直关系,可对超厚实线体进行完全切割的无限大平面。为确定切割面位置,本文以虚线中心线起始端点为起点,以虚线线段的设计线段和空格间隔长度为依据,计算切割面所在位置距起点的距离列表
,(
),切割面的数量为
,长度列表即为切割面所在的切割为值列表。
如图6,令第一个切割面
距离标线起点的距离为a,标线的全长为b,实线段的长度为c,虚线间隔为d,得到n (如式(2)),结合线段间隔确定
(如式(3))。
(2)
(3)
依照列表
,可建立垂直于标线中心线的
个无限大切割面,切割面对超厚实线体(如图7(a))切割可得到
个超厚体(如图7(b)),这些超厚体由交替出现的虚线线段和间隔段组成,可通过间隔筛选的方式删除间隔段,剩余的体对象即为虚线对象的超厚标线体(如图7(c))。
 (a) 超厚实线体
(a) 超厚实线体 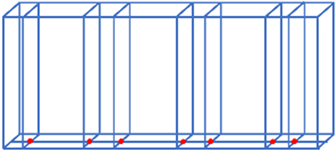 (b) 切割后
(b) 切割后 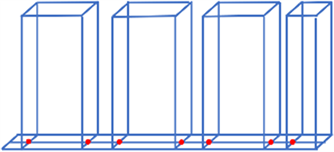 (c) 间隔删选
(c) 间隔删选
Figure 7. Modeling of dashed super thick body
图7. 虚线超厚体建模
2) 非线状标线体的超厚体建模
使用外轮廓数据
为基础,令数据高度为小于路面高
的
,则
,合并线数据生成轮廓线框,线框成面完成超厚体底面构造。将该底面向上纵向拉伸s,
,完成的超厚体构造,该体与厚度控制体呈交集关系(如图8)。

Figure 8. Modeling of irregular marking super thick body
图8. 不规则标线超厚体建模
2.4. 基于参数控制的道路设施建模
道路设施对象通常具有标准外形,并且在道路场景中重复出现。本文采用先建立单个设施的参数化模型,再控制参数的方法,对每个道路设施的三维外观进行固定,利用设施数据的位置信息完成对模型的批量插入。
参数化模型由高度和朝向组成,在建模坐标系XYZ中,为每个设施在纵向Z方向设置与底面控制点
同轴的另一个控制点
,则两点之间的距离为高度信息参数
(如图9(a));在XY平面中,以
点为坐标原点,将设备朝向方向与X轴正方向之间,沿顺指针的偏转角度作为设施的朝向参数
)。基于道路方向
,可通过控制参数
,完成对设施与道路朝向联系的表达,图9(b)为一个位于道路左侧,并与之相互垂直的路灯的偏转实例,
。
通过控制高度信息参数以及朝向信息参数,可完成每个独立模型的定型,每个设施的参数化模型为
。
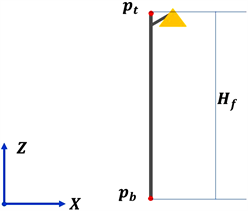 (a) 高度参数Hf
(a) 高度参数Hf 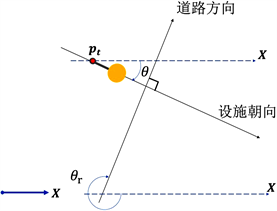 (b) 朝向参数θ
(b) 朝向参数θ
Figure 9. Parameter control of road facilities
图9. 道路设施参数控制
3. 实验与分析
3.1. 实验数据与预处理
本文实验区域位于武汉市东湖景区西侧二环线部分,路段总长约270 m,由两段规则路段(图10中1、3号路段)和一段路口不规则路段(图10中2号路段)组成。

Figure 10. Data of some sections of Wuhan Second Ring Road
图10. 武汉市二环线部分路段数据
该道路高精数据于2017年7月采集,坐标系为WGS 1984地理坐标系,包括三类场景对象:道路体对象、道路标线对象以及道路设施对象,涵盖的数量、内容等如列表1所示。

Table 1. Statistics of experimental road section data
表1. 实验路段数据情况表
实验数据的预处理,包括坐标转换以及基准点变更两个部分。根据所在地武汉的地理位置,实验选择Gauss Kruger投影方式,进行坐标投影转换;然后使用中心化方式,将建模数据的中心点置于建模坐标的原点。
实验从Autodesk Revit作为建模平台,使用Dynamo编程组件作为开发平台,利用Python Script脚本开发自定义节点包功能,对上文提出的建模方法进行编程,实现了道路体、道路标线以及道路设施三种对象的自动化建模,最后使用Navisworks平台实现模型渲染。
3.2. 道路场景的三维建模
3.2.1. 道路体建模
以中段不规则道路的外轮廓线数据以及两段规则道路的中心线数据作为建模依据,分别采用外轮廓方法和平纵横方法对三段道路进行建模。
由于实验数据无相应的道路横截面设计信息,本实验以桥路主线的常用的类梯形标准横断面为参照,为规则道路路段的截面设计类梯形参数化模型,参数包括:Left-high, Right-high, Left-low, Right-low, high-low。参考《JTG B0l-2003,公路工程技术标准》,预设本实验模型的道路厚度为1 m,即规则道路的道路厚度参数high-low以及不规则道路的建模道路厚度t为1 m,同时预设原始数据缺少表达的Left-low, Right-low为6 m,则本实验中参数化模型为(x, y, z, Left-high, Right-high, 6, 6, 1),尺寸单位为米。
分别对规则路段和不规则路段进行建模,通过将建好的子道路进行组装,可以完成整个实验路段的三维建模(如图11)。
 (a) 规则道路段
(a) 规则道路段  (b) 不规则道路段
(b) 不规则道路段  (c) 完整路段
(c) 完整路段
Figure 11. Road modeling
图11. 道路建模
3.2.2. 基于空间交集的标线建模
基于空间交集方法,分别构造基于道路体上表面的厚度控制体,以及基于标线实验数据的超厚标线体,计算并拾取这两个体的空间交集结果,完成标线建模。根据国家标准《JT/T 280-2004,路面标线涂料》,将作业规范的2 mm厚度为厚度控制体的纵向参数
,对于不同的标线类型,对应的超厚体建模方法不同。
线状标线分为实线和虚线两种,实线标线超厚体是以标线的线数据作为形态位置,通过宽度尺寸控制轮廓构建,虚线超厚体则在该体的基础上,增加切割面进行切割和线段筛选完成构建。标线具体的尺寸参考国家标准《GB 5768.2-2009,道路交通标志和标线》。其中,白虚线的虚线宽度为10 mm,线段长度600 mm,线段间隔900 mm;白实线宽度为15 mm;双黄线的单线宽度为15 mm,双黄线的线间隔为10 mm。不规则标线则直接使用实验轮廓线作为形状依据进行超厚体构建。
不同类型的超厚标线体与厚度控制体的交集拾取,实现了贴合路面的标线三维体建模,图12为实验中部分标线建模效果,蓝色部分为道路体。
3.2.3. 基于参数控制的道路设施建模
试验区主要的设施为路灯。因此,以设施位置点数据为基础,使用较接近试验区情况的路灯模型(如图13(a))作为设施外形并进行参数化。将路灯模型中柱结构的中轴底部和顶部作为参数控制点
,点间距离为高度信息参数
,以外探路灯杆作为朝向参照,将灯杆与建模坐标系X轴方向之间的偏转角度
作为朝向参数,初始
。
实验预设
为7800 mm。对于偏转角度
,获取道路朝向方向与建模坐标系X轴的角度
,根据几何关系,则道路左侧路灯(如图13(b))的
,右侧
。
 (a) 路灯模型(三维视角)
(a) 路灯模型(三维视角) 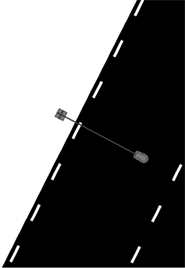 (b) 转向参数化(俯视)
(b) 转向参数化(俯视)
Figure 13. Road facility modeling
图13. 设施路灯建模
3.2.4. 实验区建模效果
完成道路体对象、道路标线对象以及道路设施三种对象的三维建模后,根据模型自带的相对坐标可完成部件之间的拼装,基于Navisworks平台,根据建模时赋予的材质属性,对每个部件的三维全渲染,得到完整的目标路段道路场景的三维建模结果(如图14)。
 (a) 俯视视角
(a) 俯视视角 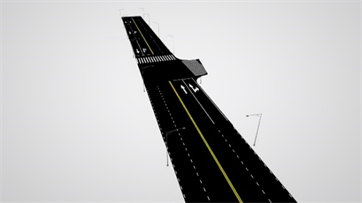 (b) 三维视角
(b) 三维视角
Figure 14. 3D modeling effect of target road section
图14. 目标路段三维建模效果
经本方法完成的三维模型,具备较好的模型完整性,路段间拼接效果良好,各道路对象无部件碰撞冲突。经测量,2号不规则道路的两侧截面与1、3号规则道路的两拼接面间无相交冲突,截面间最大距离为0.006米,拼接处路面高度差小于0.001米,1、3号道路两侧外轮廓与2号路段外轮廓之间的4个尺寸差分别为0.001米,0.003米,0.002米,0.002米,拼接效果良好。此外,全路段标线模型与路面模型无碰撞冲突,具备较好贴合效果。
4. 结论
对于高精道路地图的三维可视化构建问题,本文提出了一种以高精地图数据为依据的建模方法,将道路场景分为道路体、标线对象和道路设施三部分,根据外观特点,设计不同的方法分别建模,通过部件拼接策略完成整体模型构建。
在道路建模方面,对于规则道路和不规则道路,分别提出了平纵横建模与外轮廓建模方法,规则道路的中心线复现了路段的起伏与位置,横截面设计表达了规则道路外轮廓,不规则道路的外轮廓控制了道路外形。在道路标线方面,提出了空间交集方法,该方法生成的标线模型与道路平面完全贴合。对于道路设施,通过对单个设施的高度与角度控制,结合位置数据,满足了设施模型的批量构建。
本文使用实验对上述建模方法进行验证,各个分部件的建模由基于上述方法二次发开的程序自动实现,建模数据的选取与最终模型的渲染则使用手工辅助。结果表明,路段间拼接效果良好,各道路对象无部件碰撞冲突,建成的模型细节丰富,具有较高的可视化效果。
下一步的研究重点是在三维模型的基础上赋予高精地图语义属性信息,如:地图属性,拓扑关系、对象属性等,对地图的信息数据进行集成,并进一步结合无人驾驶仿真测试算法,为无人驾驶算法测试仿真提供场景。此外,还应针对大场景的道路对象建模,研究制定合理的路段拼装以及坐标对齐策略。
基金项目
国家重点研发项目(2021YFB2501103)、国家自然科学基金项目(41771482)和上海市科委社会发展科技攻关项目(21DZ1204100)。
NOTES
*通讯作者。