1. 引言
群体行为是自然界中物种的普遍行为,自然界中鸟群、鱼群的群体行为,例如群体的协作捕食、群体共同抵御侵略者等的这些集群现象,在很久之前,就受到了人们的广泛关注,并对其展开了比较详细的分析以及研究 [1]。集群可指代群体的自组织行为,即自驱动粒子通过有限的环境信息和简单的相互作用规则实现从无序状态到有序状态演变的一种群体协同现象。对集群现象进行研究不仅可以根据其内在机制和形成机理模拟自然界的集群行为,在军事、航天、工业、娱乐等各个领域都具有广泛的应用前景 [2] [3] [4] [5] [6]。
在物种集群现象以及凝聚力现象的背景下,生态学和理论生物学已经做了相关问题的研究。最早,生物学家应用数学方程研究了鱼类的群体行为,并提出了一类基于斥力/引力函数的群体集群模型 [7]。接着,又提出了模拟动物聚集的计算机模型 [8] [9]。基于三维计算几何以及聚集、分离、对齐三原则,这三个规则的叠加使得所有个体都在同一个队形中移动,避免碰撞的同时还能具有相同的运动方向,基于此生成鸟群和鱼群运动的计算机动画,旨在描述鸟群的集群现象。该模型可推广到领导者–跟随者策略中,其中一个个体充当领导者,其他个体遵循三原则,形成领导跟随的现象 [10]。
1995年Vicsek [11] 等人提出了一个描述粒子聚集现象的离散动力学模型,所有个体只遵循对齐原则,个体以邻居个体速度及自身速度的平均值为标准,调节自身的速度与其达成一致,最终所有个体以相同的速度进行集群运动。后来证明可知Vicsek模型是动物聚集计算机模型的一种特殊情况。
自组织系统集群运动的过程中,在实现速度同步的同时,为了实现对智能体之间的相对位置进行调节,2003年,Tanner和Jadbabie [12] - [17] 利用势函数以及邻居速度差项构造了局部控制率,并结合图论知识,建立固定或动态变化的互联拓扑结构,以此为基础,根据势函数的性质,实现个体在某期望范围内以紧密的队形朝相同的方向进行集群运动。接着,两位学者对该模型进行了改进,将局部控制率中的速度差项由陀螺力来代替,该力由速度所表示,作用于与速度正交的方向,只改变速度的方向不改变系统的动能,由此来实现速度相同的位置差有界的稳定状态。2006年,基于以上集群模型,Cucker和Smale [12] 对其进行了改进和总结,提出了连续时间的经典集群运动模型,Cucker-Smale集群模型,该模型以速度对齐为基础,引入了以个体相对位置为自变量的影响函数,以此来调节个体之间的距离以及所有个体的速度,最终系统会收敛到一个稳定的状态,即:任意一对个体间的相对位置有界,所有个体的速度一致。
2013年,Maidens和Michael Li [18] 受C-S模型以及Tanner提出的局部控制率的启发,构造了以簇内领导者构成的外层,及以分簇成员构成的内层所构成的双层多智能体系统编队控制的模型,内层遵循领导者跟随者策略,成员与领导者对齐,外层领导者与领导者之间速度对齐,从而实现整体的稳定。
自组织系统的集群运动是近些年的热点研究问题,上述学者开展了持续深入的研究。本文以上述模型为基础,首先,引入编队控制的概念,建立了自组织系统可编队控制集群运动的三维动力学模型,并结合图论知识,设计期望编队构型,选择合适的势函数构造智能体的控制率,实现期望编队的集群运动。然后,构造为系统Lyapunov函数,证明模型的稳定性以及编队控制的可实现性。最后,通过MATLAB进行数值仿真验证理论结果。
2. 模型建立
设有N个智能体,第i个智能体的位置和速度为
及
。系统集群运动的牛顿动力学建模为:
,
。
其中:
是智能体i受到其他智能体耦合作用力所产生的加速度。
给定N个智能体的目标编队构型,基于图实现相关理论,由文献 [19] [20] 可知,对于任意的期望编队构型,都存在一个刚性的邻接图
及G在
上的实现p,使得:
(1)
;
(2)
;
其中:
,
,且边
的长度
,
。
邻接图G对应的邻接矩阵
及权重邻接矩阵
分别为:
,
。
其中
,
表示智能体i与j之间存在相互作用力,否则
;当
时,
表示智能体i与j之间的期望距离;若
(即智能体i与j之间不存在相互作用力),则
。
为实现智能体之间的相互在距离,为智能体设人工势函数
,
,
其中,势函数
以相对位置
为自变量的,且势函数有如下性质 [15]:
(1) 当
时,
;
(2) 当智能体i和j之间的距离为期望距离时,
取得唯一最小值。
根据势函数的性质,设势函数为:
,
则控制率的表达式为:
。
由此可得出,多智能体系统可编队控制集群运动的动力学模型为:
,
(2.1)
其中,
,
。
3. 稳定性证明
定理1多智能体系统(2.1)在任意的初始位置与初始速度下,系统的解
渐近收敛到下述两种稳定状态之一,即:
集群稳定:
(1) 智能体的位置关系满足:
;
(2) 智能体间速度达成一致,即:
。
或编队控制稳定:
(1) 智能体间距离为期望距离,即:
;
(2) 智能体间速度达成一致,即:
;
(3) 势函数
达到最小值。
证明:设系统的Lyapunov函数为:
(3.2)
其中,
取非零正常数
,
为第i个智能体的Lyapunov函数:
,
显然,V是正定函数。对(3.2)式进行求导,得:
带入加速度公式的:
。
化简得:
,
取边函数:
(3.3)
根据文献 [18] 可知,(3.3)式满足循环条件,可得
,当且仅当
时,等号成立。因此系统的解渐近收敛到不变子集
。
在上述不变子集中,由于
,这里设
,则有
,对该式求导得:
(3.4)
又由
可得
,这里设
,求导得
,得:
,
, (3.5)
(3.4) (3.5)式做比得:
(3.6)
由于(3.5)式同理可得:
,将该式带入到(3.6)式中得:
,
同乘
,得:
。可得:
。
另一方面,由于
,故:
。
接着对势函数求导:
。
由于
,故有:
有零解和非零解。
当初始状态在吸引域
内,则
取零解,
系统的解渐近收敛到编队控制稳定状态,即:系统中的智能体在期望位置处,这时
,因为
,所以:
,
,
又因为,智能体i和j不能在同一位置,即:
,故:
即在不变子集中势函数
取得最小值。
当
取得最小值时,智能体的速度满足
,V满足
。并且智能体间的距离关系满足给定的期望距离,智能体间的位置关系也与所给的期望编队结构一致。
当初始状态在吸引域
内,则
取非零解,
系统的解渐近收敛到集群稳定状态,此时,智能体的位置和速度满足:
,
,
。
4. 数值仿真
本节分别针对
时的多智能体系统进行数值仿真分析。
在含有4个智能体的多智能体系统中,图1(a)是系统的期望编队示意图,权重邻接矩阵
包含所有连边的期望距离,图1(b)是
时刻四个智能体在三维空间中随机产生的初始位置和初始速度,图1(c)是一段时间之后系统按期望编队以相同速度进行集群运动的示意图,图1(d)是在这段时间之内智能体间距离的变化情况,从图中我们可以看出,
左右,系统开始渐近收敛。
在含有6个智能体的多智能体系统中,图2(a)是系统的期望编队示意图,权重邻接矩阵
也是期望距离矩阵,图2(b)是
时刻六个智能体在三维空间中随机产生的初始位置和初始速度,图2(c)是一段时间之后系统按期望编队以相同速度进行集群运动的示意图,图2(d)是在这段时间之内智能体间距离的变化情况,从图中我们可以看出,
左右,系统开始渐近收敛。
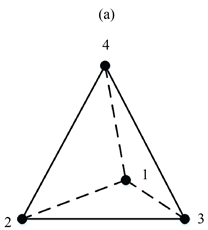
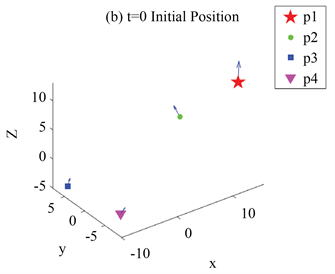
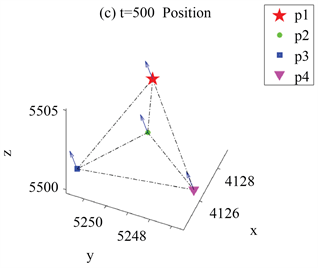
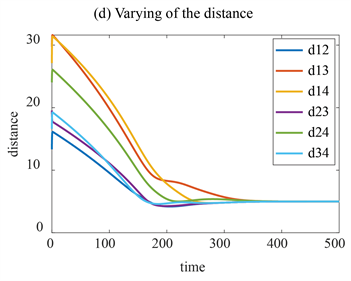
Figure 1. (a) The expected formation; (b) The initial positions and speeds; (c) positions and speeds when t = 500; (d) varying of the distance between different agents
图1. (a) 四个智能体的期望编队示意图;(b)
时的初始时刻图;(c)
时的位置图;(d) 距离变化图

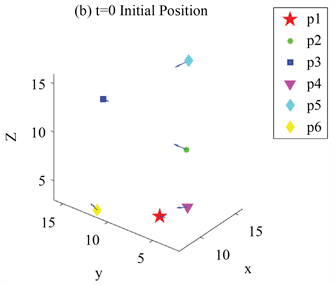
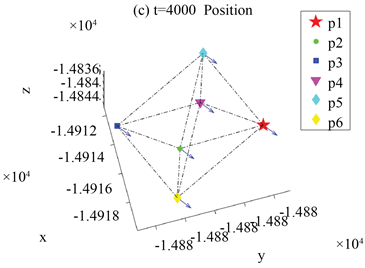
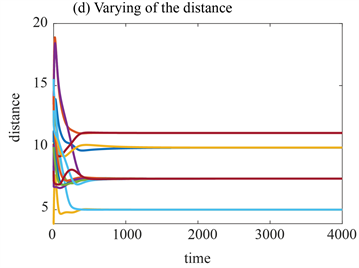
Figure 2. (a) The expected formation; (b) The initial positions and speeds; (c) positions and speeds when t = 4000; (d) varying of the distance between different agents
图2. (a) 六个智能体的期望编队示意图;(b)
时的初始时刻图;(c)
时的位置图;(d) 距离变化图
同样是含有6个智能体的多智能体系统中,图3(a)是与图2(a)不同构型的期望编队示意图,权重邻接矩阵
是期望距离矩阵,图3(b)是
时刻六个智能体在三维空间中随机产生的初始位置和初始速度,图3(c)是一段时间之后系统按期望编队以相同速度进行集群运动的示意图,图3(d)是在这段时间之内智能体间距离的变化情况,从图中我们可以看出,
左右,系统开始渐近收敛。
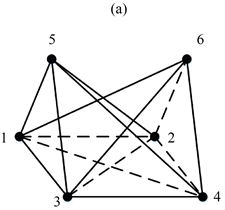
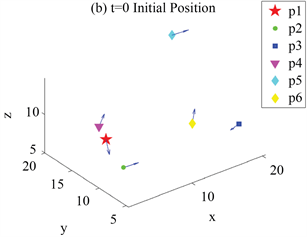
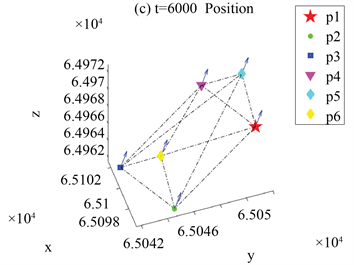
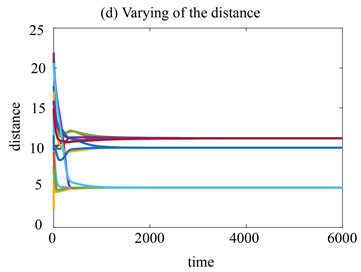
Figure 3. (a) The expected formation; (b) The initial positions and speeds; (c) positions and speeds when t = 6000; (d) varying of the distance between different agents.
图3. (a) 六个智能体的期望编队示意图;(b)
时的初始时刻图;(c)
时的位置图;(d) 距离变化图
由数值仿真结果可见,对于给定的期望编队构型,根据构型确定期望距离,在控制率的作用下,系统中的智能体最终都会收敛到速度相同、方向一致、智能体间距离与期望距离一致的稳定状态。
5. 总结
本文在文献 [13] [14] [15] [16] 的基础上,结合图实现理论、微分方程动力学及其稳定性理论,建立了三维空间中多智能体系统可编队控制的集群运动模型。首先,根据给定的期望编队构型确定智能体间的作用力以及期望距离的相互约束关系。然后,在此基础上,根据势函数以及速度差所产生的耦合作用力为智能体构造局部控制率。接着,通过构造全局Lyapunov函数,理论证明系统可编队控制集群运动的稳定,即系统所有智能体最终渐近收敛到速度相同、方向一致、智能体间距离满足期望距离的稳定状态。最后,对基于不同构型的多智能体运动进行了数值仿真,验证了理论结果。
然而该模型只分析了理想状态下的集群运动现象,在自然界中,受环境等不同因素的影响,智能体之间的信息交换,或队形变换的过程中可能会产生时间延迟等情况,在此情况下,需要进一步改进模型及深入研究。
基金项目
国家自然科学基金(11426045)、吉林省自然科学基金学科布局项目(20180101229JC)。
NOTES
*通讯作者。