1. 引言
空间站是中国载人航天工程的重要目标之一 [1] [2] [3],由天和核心舱、实验舱I、实验舱II、载人飞船和货运飞船五个模块组成。各飞行器既是独立的飞行器,具备独立的飞行能力,又可以与核心舱组合成多种形态的空间组合体,在核心舱统一调度下协同工作,完成空间站承担的各项任务。作为空间站的指挥控制中心,航天员的生活起居将在这里进行,并将在此开展一定的空间科学实验和技术实验,货运飞船需向空间站定期补给食品、货物、燃料和仪器设备等。货运飞船与核心舱对接采用后向对接模式,对接过程中,通信天线担负着核心舱与货运飞船之间的数据传递任务。
受制于火箭包络空间的限制,通信天线的安装需实现由折叠状态到展开状态的转换,发射时为折叠状态,满足火箭包络空间要求,入轨后再完全展开至工作状态,执行后期空间站后向对接时的数据传递任务。宇航空间展开机构 [4] 已得到国内外众多宇航研究机构的广泛关注,王壁 [5] 等对空间站柔性展开机构仿真方法进行了研究,为我国空间站大型柔性太阳电池翼的设计分析提供参考;李菡 [6] 等对空间大型可展开天线展开机构进行了分析,提出了绳索排布式环形可展开机构设计方法;简世康,郭策 [7] 以一种圆形空间展开机构设计为基础,对空间展开机构设计及其动力学分析进行了研究;陈务军 [8] 等对扭簧驱动空间展开桁架结构进行了分析,通过弹性刚度矩阵和一致性质量矩阵计算方法,有效确定合理的扭簧刚度系数。以上研究均为理论型分析,对工程设计指导意义有限。
空间展开机构根据驱动模式分为有源展开机构和无源展开机构两种。有源展开机构由电机驱动,减速机构减速,微动开关到位检测,涡轮蜗杆实现到位自锁,展开速度可调节,冲击小,适应于可重复展开工况。无源展开机构由转轴处扭簧提供驱动力矩展开,锁定压簧提供阻尼调节展开速度,使展开到位冲击小,结构简单,适用于一次展开工况。本文从工程设计出发,阐述了一种应用于空间站核心舱后向对接通信天线展开锁定机构的设计方法。根据通信天线的使用技术要求和安装位置要求,首先介绍了通信天线展开锁定机构的实现过程,其次通过机构动力学仿真,在保证展开时间的条件下,初步确定扭簧驱动力矩,实际测量展开过程中高频电缆阻力矩最大值,确定机构展开驱动力矩,并依据空间站产品设计和建造规范,校核驱动力矩裕度值,满足空间站设计要求,最后通过机构动力学仿真,得出展开末期机械止挡、凸轮、锁定滚轮的冲击载荷,在保证展开时间和驱动裕度的同时,确定最小驱动力矩,保证展开过程的稳定性和可靠性。
2. 天线展开机构结构简图
天线展开机构主要由天线、安装底座、展开锁定机构、连接件1、连接件2、连接件3、天线展开臂等组成,见图1 (锁紧状态)。
天线展开机构固定端通过安装底座固定在舱壁上,核心舱发射时,受制于火箭包络空间的限制,天线展开机构收拢后,依靠固定在舱壁上的压紧释放装置固定天线,入轨后,压紧释放装置释放天线,展开锁定机构展开天线至工作状态并锁定,展开角度99˚。
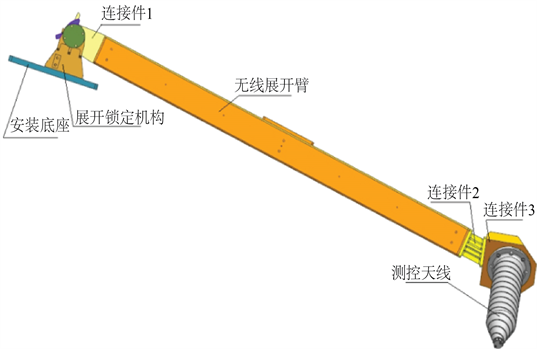
Figure 1. The structure diagram of the antenna deployment mechanism (locked state)
图1. 天线展开机构结构简图(锁紧状态)
3. 展开锁定机构设计
展开锁定机构的功能包括两个:依靠扭簧驱动力矩将天线展开至工作状态;依靠锁定装置和机械止挡实现天线双向锁定,见图2。
天线展开机构为无源展开,展开过程中,依靠转轴处的扭簧为机构展开提供驱动力矩,锁紧装置中的压簧又提供一定的阻尼,减缓展开速度,使展开过程平稳,冲击小。此种展开锁定机构体积小,重量轻,结构简单,适用于负载较轻,惯量较小的空间展开机构设计中,已成功应用于在轨多个型号的机构类产品设计中。
展开后,依靠压簧的推力和机械止挡将天线锁定在工作状态。空间站在轨设计寿命10年,在轨高度为400 Km,属低地球轨道空间环境,对航天器材料选用及结构设计有影响的主要有原子氧、热循环、空间辐射、高真空等。在复杂多变的空间环境中,压簧的机械性能可能会逐步下降,当核心舱与来访飞行器对接时,对接过程中产生的冲击力如果大于压簧的推力,压簧的锁紧功能将消失,就会造成天线在太空中摆动的状态,影响天线的通信功能,因此增加了辅助的棘轮棘爪锁定机构,见图3。棘轮固定在曲轴上,棘爪固定在支座上,拉簧两端分别与棘轮和棘爪连接。展开过程中,棘轮随曲轴同步转动,棘轮在棘爪端面上滑动,当天线展开至工作状态时,棘爪依靠拉簧的拉力滑进棘轮的槽内,依靠棘轮棘爪的运动单向性实现锁定。当压簧的锁紧功能消失后,一侧依靠机械止挡限位,一侧靠棘轮棘爪限位,锁定功能正常,不会出现天线在太空中摆动的故障工况。

Figure 2. Structure diagram of unfolding locking mechanism (unfolded state)
图2. 展开锁定机构结构简图(展开状态)
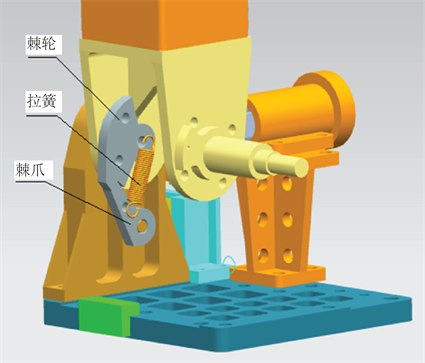
Figure 3. The structure diagram of the auxiliary locking mechanism
图3. 辅助锁定机构结构简图
4. 展开驱动力矩设计
4.1. 展开驱动力矩初始设计
天线展开机构为无源展开,展开角度从−9˚到+90˚工作位置,展开行程99˚。展开过程中的驱动力矩为扭簧扭力矩,阻力矩分别为凸轮压簧阻力矩、电缆阻力矩、轴系(轴承)摩擦阻力矩。
初始设计时,利用三维造型软件进行实体建模,通过ADAMS分析软件进行天线展开机构无重力情况下的机构动力学仿真,得到机构从释放至展开到位过程的角度–时间变化曲线,展开末期的冲击力变化等曲线,从而验证展开锁定机构方案的可行性,并通过多轮优化迭代,在满足展开时间不大于3″的前提下,初步确定扭簧及压簧的设计参数,对结构设计提供初始数据,为后续工程设计奠定基础。
转动件材料属性见表1,扭簧初始性能参数见表2,压簧初始性能参数见表3。动力学仿真条件设置:取重力为零;所有与活动件的接触面处采用二硫化钼硫化处理,其动摩擦系数为0.1,静摩擦系数为0.2;扭簧和压簧阻尼系数为零。
天线展开机构展开角度–时间变化曲线如图4,展开时间约2.6″,见图5,满足技术指标要求。展开时间满足后,初步确定了扭簧和压簧的材料、直径和刚度系数。

Table 1. Material properties of rotating parts
表1. 转动件材料属性
Table 2. Initial performance parameter table of torsion spring
表2. 扭簧初始性能参数表
Table 3. The initial performance parameter table of compression spring
表3. 压簧初始性能参数表

Figure 4. The curve of the mechanism’s deployment angle vs. time
图4. 机构展开角度–时间变化曲线
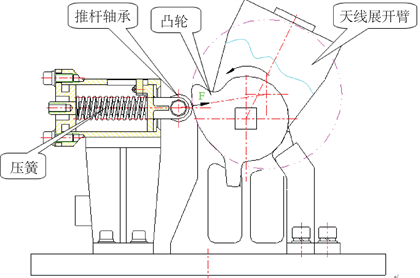
Figure 5. The schematic diagram of the cam rotating with the antenna deployment arm
图5. 凸轮随天线展开臂转动示意图
4.2. 展开驱动力矩修正
天线展开过程动力学仿真未考虑电缆阻力矩,高频电缆安装时,电缆外表面包覆多层隔热组件,一端固定在展开锁定机构曲轴上,为转动端,一端固定在底板上,为固定端,电缆走线为空间形状,展开过程中电缆产生的阻力矩非线性,需对其进行实际测量。测量时,拆除扭簧,在展开臂上放置拉力点,用数显式推拉力计拉动拉力点,每转过一个角度,静止时,拉力与阻力平衡,数显式推拉力计显示的拉力值就等于电缆阻力和摩擦力的和,测试结果见表4。依据试验温度0℃的测试结果,天线展开角度85˚时,高频电缆和转轴摩擦力矩之和为150 Nmm。扭簧剩余扭转角20˚,计算剩余扭力矩 [9] 为352 Nmm,要在不小于3秒展开到位,此时的扭簧扭力应不小于剩余扭力矩和高频电缆和转轴摩擦力矩之和,即502 Nmm,扭簧刚度与扭转角为线性关系,计算的扭簧刚度为25.1 Nmm/˚。在扭簧外形尺寸和安装位置不变的情况下,依据扭簧材料不锈钢丝的力学性能,刚度变大时,直径需增加,因此修正扭簧直径为Φ 3 mm,根据圆柱螺旋扭转弹簧的结构及特性曲线 [9],计算扭簧刚度为26.5 Nmm/˚。
Table 4. High-frequency cable and shafting resistance torque test table
表4. 高频电缆及轴系阻力矩测试表
5. 展开静力矩裕度校核
依据空间站产品设计和建造规范,对于有相对运动的机构产品,其静力矩裕度应大于1。扭簧和压簧的设计参数确定后,需对天线展开静力矩裕度ηs进行校核,满足技术指标要求。
(4.1)
式中ηs——静力矩裕度;
M——最小驱动力矩(N∙m);
R——最大阻力力矩(mm)。
天线在展开过程中,凸轮随天线展开臂转动,见图6,凸轮表面受到推杆轴承在压簧力的作用下产生一个阻力。凸轮阻力随着天线展开角度增大而增加,当展开到64.63˚位置时,凸轮与推杆轴承接触处于临界点,此时凸轮阻力最大,阻力臂也最大,因此凸轮阻力矩也最大,如图7所示。天线在展开过程中阻力分别为凸轮阻力、电缆阻力、轴系(轴承)摩擦阻力,总的阻力矩为三者之和。在天线展开过程中,由于凸轮阻力、电缆阻力是随着展开角度不断变化的,在凸轮阻力矩达到最大位置时,也是总阻力矩的最大位置。此时虽然电缆的阻力矩未达到最大值,但随着凸轮转过临界点后,锁紧装置进入锁紧过程,此过程由凸轮阻力随着压簧的释放转变为了凸轮动力。
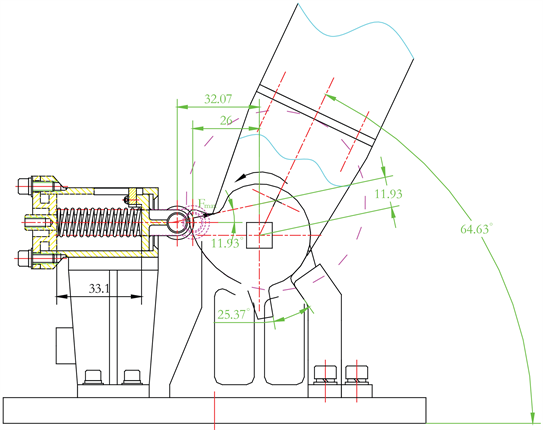
Figure 6. Schematic diagram of the maximum point of cam resistance torque
图6. 凸轮阻力矩最大点示意图
天线-9˚锁紧状态时,压簧初始压缩距离10.7 mm,当运行到凸轮阻力矩达到最大位置时,天线展开角度64.63˚,见图8,又压缩了6.07 mm (32.07 – 26 = 6.07),总压缩距离为16.77 mm,产生的正压力为29 N (1.73 × 16.77 = 29),阻力矩与正压力的夹角为11.93˚,则阻力矩为28.4 N (29 × (cos11.93) = 28.4 N),阻力矩力臂长度11.93 mm,计算凸轮阻力矩为338.5 (28.4 × 11.93 = 338.5 Nmm)。查表1的电缆及轴系阻力矩为100 Nmm。总的最大阻力矩R = 338.5 + 100 = 438.5。
天线-9˚锁紧状态时,扭簧扭转角114˚,当运行到凸轮阻力矩达到最大位置时,天线展开角度64.63˚时,扭簧剩余扭转角为40.37˚ (114 − 9 − 64.63 = 40.37),则最小驱动力矩M为1069.8 Nmm。
将最大阻力矩R和最小驱动力矩M带入式(4.1),计算得天线展开静力矩裕度ηs为:
,满足技术指标要求。
6. 展开末期冲击载荷分析
展开驱动力矩修正后,通过ADAMS分析软件重新进行天线展开机构无重力情况下的动力学仿真,在保证展开时间和驱动裕度的情况下,得出凸轮与机械止挡的冲击力变化曲线,见图7。最大撞击力约为2600 N,接触面积为100 mm2,计算应力为26 MPa,机械止挡材料为2A14铝合金材料,冲击应力远小于铝合金的破坏强度极限。凸轮与锁定滚轮之间的冲击力变化曲线见图8,最大撞击力约为280 N,最大撞击力约为280 N,小于滚轮轴承的额定负荷(额定动负荷1080 N,额定静负荷440 N),因此整个展开过程中设备是安全的。
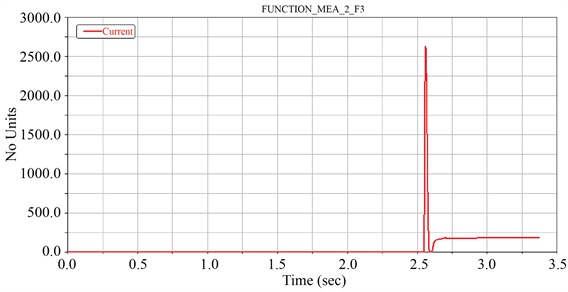
Figure 7. The curve of the impact force between the cam and the mechanical stop over time
图7. 凸轮与机械止挡的冲击力随时间变化曲线
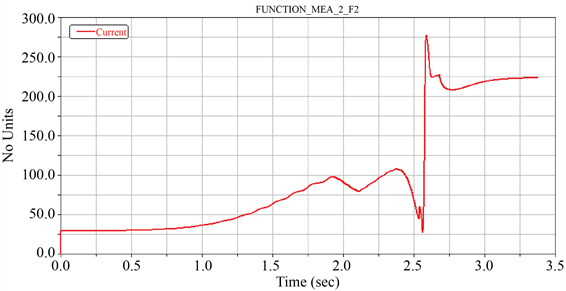
Figure 8. The curve of the impact force of the cam and the locking roller over time
图8. 凸轮与锁定滚轮的冲击力随时间变化曲线
7. 结束语
本文从工程设计出发,阐述了一种应用于空间站核心舱后向对接通信天线展开锁定机构的设计方法。展开锁定机构采用无源展开,巧妙利用机械止挡和棘轮棘爪实现双向可靠锁定,满足空间站在轨15年寿命要求。通过ADAMS机构动力学仿真设计方法和实际测量展开过程中高频电缆阻力矩最大值,在保证展开时间的条件下,确定机构展开驱动力矩,并依据空间站产品设计和建造规范,校核驱动力矩裕度值满足空间站设计要求,最后通过机构动力学仿真,得出展开末期机械止挡、凸轮和锁定滚轮的最大冲击载荷,在保证展开时间、驱动裕度以及结构强度的同时,确定最小驱动力矩,保证展开过程的稳定性和可靠性。
后续将对通信天线展开锁定机构进行优化设计,并利用有限元分析方法计算锁紧状态下展开锁定机构的固有频率及各振动工况下的应力,对其结构刚强度予以验证,满足空间展开锁定机构小型化、轻型化设计要求。
参考文献