1. 引言
近年来,风能作为一种可再生资源在全世界范围内越来越受到人们关注。随着风能的发展,海上浮式风机发电已成为一个新的研究热点话题。由于中国政府提出“碳中和”政策,中国研究人员的努力也不断促进着海上浮式风机的发展。
海上风能资源不仅质量高,而且海上风力发电这一项目能为靠近海洋的人口稠密地区提供大量廉价清洁的电力供应,如美国、中国、日本、挪威、韩国等 [1] [2]。2017年,挪威国家石油公司投资建设了世界上第一座海上浮动风电场,由此开始了在北欧的大规模应用 [3]。
由于风力涡轮机是非线性的,并且风的动态行为比涡轮机变化更快且不可预测,因此很难建立一个完美的数学模型来有效捕捉其动态特性。这个原因迫使我们必须通过选择合适的控制方法对其进行抽象,进而构造合适的数学模型 [4]。为了分析风力涡轮机俯仰运动(pitch motion)的空气动力学特性,文献 [5] 使用了耦合气动俯仰角控制系统模型,文献 [6] 构建了高阶混合数值模型。为了设计主动控制器,文献 [7] 建立了三自由度(3-DOF)动力学模型,对平台俯仰(platform pitch)、塔架倾斜(tower tilt)、TMD (调谐质量阻尼器)运动等参数进行了分析并设计了主动控制系统。文献 [8] 也从驳船的六个自由度运动分量中选取了三个,建立了TMD的纵荡–垂荡–纵摇(surge-heave-pitch)动力学模型,并利用该模型进行参数调整。在这些建模方法中,FAST和GH Blade是最流行的控制方法。这两种建模通常用于风力涡轮机被动、半主动和主动结构控制的设计 [9]。
需要注意的是,自从海上浮式风机提出以来,关于它的研究主要集中在两个方面:一个是如何在最优功率和最大减载之间实现平衡;另一个是如何设计可变增益控制器以减少外部干扰。这两个研究方向迸发了许多研究成果。但由于风机的多模态导致的高计算复杂性和高成本问题,如何对具有多模态的风机模型进行降阶的研究而鲜有涉及,这也是我们研究的初衷。
模型降阶的目的是获得一个低阶系统,使得该系统依据某些已给定的标准(例如,H∞、L∞、L2等)最大程度的逼近于一个高阶系统。部分文献已经提出了模型降阶的方法,比如平衡截断法 [10],模态截断法 [11] 等。由于不同风速下浮式风机具有不同的稳态特性,因此我们引入符合这个特性的线性切换系统。这个系统本质上是非线性的,但是由于其轨线划分为不同的线性区,所以具有可行的线性分析方法。
很长时间以来的降阶问题研究集中在全频域,但是我们发现很多工程问题是与频域相关的。针对这种问题,文献 [12] [13] 提出的GKYP引理(Generalized Kalman-Yakubovic-Popov lemma)建立了线性频域不等式(FDI)和线性矩阵不等式(LMI)之间的等价关系,这一引理可以充分用在如何设计有限频域滤波器上。由于在不同风速下浮式风机的功率不同,因此在此场景下单一的全频域降阶是明显行不通的,因此有限频域便应运而生。
与陆上风机不同的是,海上风机由于受到海浪和风力的影响,各结构之间的阻尼也会随之增大。不仅如此,各种器件之间传递信息也会引入较大的时延。文献 [14] 通过引入松弛矩阵来降低具有固定时延的降阶模型的保守性,但是其松弛矩阵仍有较大地结构限制。
本文首先从有限自由度风机模型产生的数据获得线性设计模型。其次,通过有限频域H∞性能指标并借助GKYP引理得到有限频域条件。再者,我们使用Lyapunov泛函、相似变换和其他一些方法来获得稳定条件。另外,论文的不同之处在于我们引入了一些结构更自由的松弛矩阵,并且是首次在浮式风机上的运用。
2. 风机模型设计及问题描述
为了建立结构简单并反映系统的主要动态过程的模型。我们使用FAST进行建模分析。该模型包括全自由度涡轮机中的三种模式,其他模式被禁止工作。三种模态包括塔架前后方向的弯曲模态(the bending mode)、平台俯仰模态(the platform pitch mode)和水平方向的阻尼模态(the damper mode)。我们选择这三个模态的主要原因是因为这些模态是引起浮式风力机俯仰运动的主要因素,而其他因素的变换可以通过调整螺旋桨俯仰角进行改进。
基于上述分析,我们确定海上浮式风机的控制系统可以抽象为本文的离散线性时滞切换系统,如下所示:
(1)
其中,
代表状态向量,
代表可测输出,
代表已知的有限频域输入范围,其
是未知的时滞长度。式中的切换信号可表示如下:
我们设定输出信号
代表的物理参数包括:平台俯仰角加速度(PtfmRAyi)、塔体顶部前后方向的平移加速度(YawBrTAxp)、俯仰力矩(TwrBsMyt),其中俯仰力矩在输出信号中占主导地位。
设定输入信号
代表的物理参数包括:作用在阻尼器上的外力(TmdXFext)、波浪对平台造成的干扰(WaveElev)。
由于我们仅仅考虑了三个模态,因此得到一个六阶线性模型,模型的输入信号u(k)和输出信号y(k)分别通过下列矩阵表述:
(2)
此处基于海上浮式风力涡轮机建立了两个相对坐标系,分别为塔架坐标系
和叶片坐标系
。具体模型如图1所示:
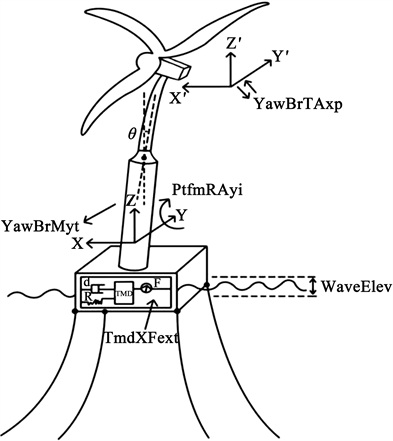
Figure 1. Schematic diagram of offshore floating wind turbine
图1. 海上浮式风机原理图
降阶系统的形式如下所示:
(3)
通过结合(1)和(3),我们得到了以下误差系统:
(4)
其中,
,
,并且
3. 主要结果
定义1 令
为一个给定标量,在零初始条件下,有以下不等式成立
其中,
,
分别是
和
的傅里叶变换式,Δ表示有限频域中不同的频域范围,当
时,
可以表示全频域范围内的H∞性能指标。从这可以看出全频域只是有限频域内的一种特殊情况。其中,
代表误差系统的有限频域H∞性能指标不大于
。即
越小,系统的有限频域性能越好。
在提出定理之前,我们引入如下带有参数的松弛矩阵:
(5)
其中
是非奇异矩阵,
和
是可优化的变量。
注释1 对于如何获得
和
的值,之前的论文是凭借经验给出的。在此我们使用的是遗传算法得出结果。在接下来的工作中我们会继续探索更合适的算法来找到更加合适的值。
基于以上松弛矩阵和上一节所定义的系统,我们给出以下模型降阶定理。
定理1 对于给定的标量
和频域范围
,如果存在矩阵
和埃米尔特矩阵
满足接下来的条件,那么我们就可以认为原始系统(1)和降阶系统(3)之间的误差系统(4)是渐进稳定的,并且在有限频域范围内具有H∞性能指标
。
(6)
除此之外,还需满足稳定性准则:
(7)
接下来,如果降阶系统(2)满足条件(6)和(7),那么其参数矩阵可以通过以下公式获得:
(8)
算法1 给定系统矩阵
和已知的频域范围
,并且降阶模型的阶次
,通过解决下列线性规划问题可以得到降阶系统的降阶矩阵:
subject to (6), (7) for middle frequency
如果满足以上条件,我们可以通过(8)的运算,获得稳定降阶模型,不等式(6)和(7)可以转换为线性矩阵不等式组,进而通过Matlab中LMI工具箱进行运算。
4. 仿真实例
针对于式(1)和图1所描述的模型,相应的实际输入输出信号的均方根值如表1所示:

Table 1. RMS value of input/output signal
表1. 输入输出信号的均方根值
利用MATLAB系统辨识工具箱,可从上述数据集中提取形如系统(1)的离散时间切换线性状态空间,系统矩阵如下:
由于风机需要根据外界状态切换控制条件,我们根据切换特点以及实测数据给出了第二个子系统的系统矩阵:
,
其次我们再次加入如下的时滞矩阵:
本例的目的是找到形如式(3)的降阶系统,并且误差系统(4)具有有限频域性能指标。因此,我们利用算法1,配合运用LMI工具箱得到表2中的结果。
Table 2. Finite-frequency performance index γ
表2. 有限频域性能指标
从上表可以看出,此方法的有限频域性能在中频段取得的效果最好。并且由于篇幅限制,我们在此仅展示中频域的降阶结果:
:
如果我们取
,我们可以得到带有以下参数矩阵的降阶系统:
图2展示了原始系统和降阶系统在的阶跃输出响应,其中采样时间为0.1 s。其中y1(k)表示原系统的阶跃输出响应,y2(k)表示降阶系统的输出响应。我们可以看出降阶系统的具有一定的逼近程度,但是仍有进步空间。
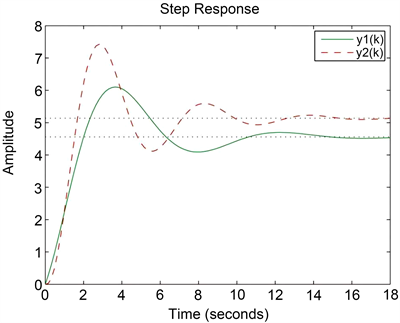
Figure 2. Step output response of reduced order system
图2. 降阶系统的阶跃输出响应
5. 结语
本文研究了具有多模态、有时滞、有限频的海上浮式涡轮机在有限频域范围内的模型降阶问题。通过对模型的研究,我们赋予输入输出向量具体的物理意义。然后从涡轮机的24个模态找到控制风机俯仰运动的三个模态,通过模型辨识得到了一个六阶线性模型,并把模型拓展为具有两个子系统的切换系统。然后通过定理1获得有限频域性能和稳定性性能两个约束条件,利用所提算法1验证了本文提出的模型降阶方法的有效性。这一进步可以为实际系统的模型降阶提供案例。