1. 引言
单波束测深仪测深原理简单,操作方便,数据量相对较少,适用于野外河道固定断面的测量。目前,长江上游水文水资源勘测局对金沙江上四大库区河段等河道地形测量基本上采用基于单波束测深、GNSS平面定位的断面测量模式。在最近测量河道整治后的溪洛渡库区时发现,部分测深数据较混乱,通过对其多年断面的测量数据分析发现,溪洛渡坝下二道坝50 m范围内地形呈漏斗型,地形复杂,利用单波束测深仪HY1601测量的水深数据显示回声波中存在多次回波的叠加。本文结合近几年长江上游水文水资源勘测局对溪洛渡库区河道地形测量项目的资料,对单波束测深仪测深数据出现的混响现象做了一定的成因分析和后期数据优化处理,希望能对同行后期使用单波束测深仪测深出现混响提供参考和帮助。
2. 单波束测深仪测深原理
单波束测深仪在水中测量水体深度时的原理主要是通过利用水声换能器从船体底部竖直地向下发射声波信号,从换能器中所发射的声波信号到达水底后,经河底面的反射返回到水声换能器,测深仪的主机可以通过计算得到水声信号在水中传播路径上来回传播的时间,再根据当时环境下的声波在水中传播速度,从而可以计算出水声换能器下表面和河底之间的距离h,再通过钢尺等测量长度的工具测量换能器下表面距离水面的长度D,两者相加即是所测水域的水深真实值 [1] 。
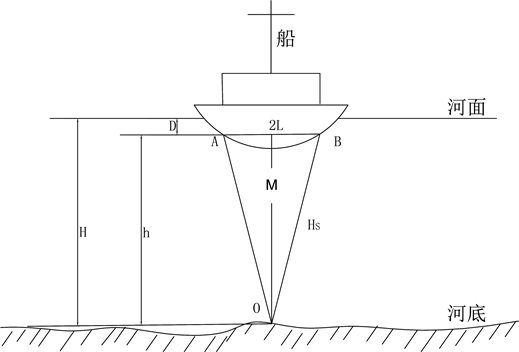
Figure 1. Marine single beam echo sounder working principle of measuring the depth of the water
图1. 船用单波束测深仪测量水深的工作原理
船用单波束测深仪测量水深的工作原理见图1,在船体底部的单波束测深仪换能器到河底的距离为单波束测深仪换能器从A点发射出一定频率的脉冲声波,脉冲声波经过水体到达河底O点,再经过河底表面物体的反射回到B点,反射的声波在B点由换能器接收,A和B两点的距离为2L,当时环境下声波在水体中的传播速度用c表示,声波由A到B在水中存在的时间t,单波束测深仪换能器到河底的竖直距离用h表示,所测水域深度H为:
(1-1)
(1-2)
一般单波束测深仪均采用收发合置换能器,即A点和B点重合且垂直水面,则所测水域深度可简化为:
(1-3)
D为固定可测的值,声速c与水体的温度、盐度等有关,可利用经验公式或查表获得,时间t为测深仪发射声波与接收反射回波的时间间隔。
3. 混响的形成
混响信号是指单波束的声波在传播途径中由于随机起伏的河面或河床不平整而造成的河底或者河水介质内部随机不均衡性而形成的反向散射于接收地点所获得的声波信号 [2] 。混响通常是单波束伴随着发射信号而产生的,是单一波束系统中主要背景的干扰,混响通常是一个非常复杂的过程,受到多种因素的作用和影响,当对它们进行理论研究时,我们就需要尽量忽略某些次要因素,以突出它们的主要因素来简化复杂的研究,我们可以假定这样做如下:
1) 线方向的传播,除了球面上的衰减外,其它衰减产生的原因均可忽略不计。当然,河水的吸收也是一个可以计算而得到的。
2) 在任一瞬间,位于特定的面积或体积内的各种散射物之间的分布都是统计均衡的,且每个散射物都具有相同的贡献。
3) 散射体的种类和数量非常多,以致于在任何一个体元上或者是任何表面元上都存在着大量散射体。
4) 不考虑二次反射。
4. 混响模型
为了方便混响的研究,混响计算过程中选择采用散射声场非相干叠加的形式进行。考虑到浅水单站混响问题如图2所示,河水和河底均可视为一个均匀半空间,某一特定时刻的混响强度可视为河底各个散射元产生并同时发出到达或接受点的散射音强的叠加。为分析近程河底混响形成过程,图中从左至右给出了单条散射路径的河底散射区域随时间的变化过程,可以看出,声波信号刚传到河底时,河底开始形成圆形散射区域且半径逐渐增大,在脉宽为r的信号完全入射到河底的时刻散射区域开始变成圆环,并随时间推移逐渐向外扩展 [3] 。
根据回射声线路径和出射角方向,本文考虑河底地形,其散射路径分为4组,如图3所示:(a) 出射角向下的声线经若干次界面反射后直接由河底散射返回接收点;(b) 出射角向上的声线经若干次界面反射后直接由河底散射返回接收点;(c) 出射角向下的声线经若干次界面反射后由河底散射返回接收点的过程中被河面反射一次;(d) 出射角向上的声线经若干次界面反射后由河底散射返回接收点的过程中被河面反射一次。
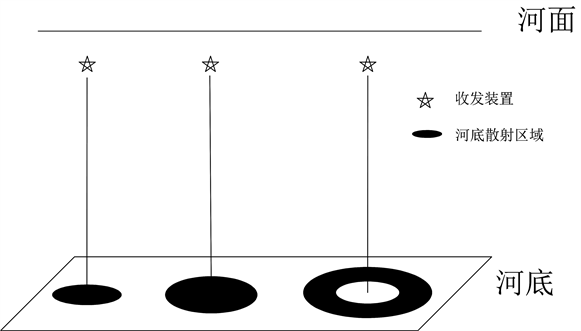
Figure 2. Shallow monostatic reverberation
图2. 浅水单站混响
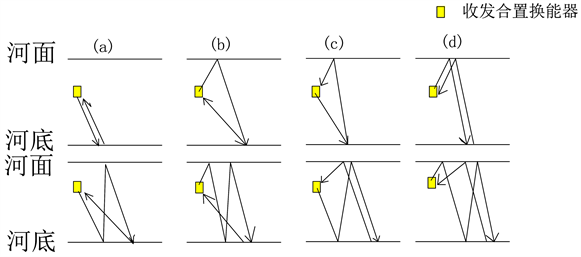
Figure 3. Monostatic reverberation scattering paths
图3. 单站混响散射路径
假设在一个时刻t共有M条河底散射路径对于混响有贡献,将一个河底散射地带区域宽度大约为r的一个圆环进行离散,则在这个时刻t路径m (
)在粗糙河底界面上对应一组散射环r,忽略水体吸收的影响,河底平均混响强度表示为各路径河底散射能量的非相干叠加形式:
(3-1)
其中,P0为声源声压,σm和Rm分别为路径m对应的河底散射截面和声源与散射微元间水平距离。
通过声线传播路径,可以通过判断测量区域大致水深后,计算出单波束到河底的传播时间t,测量时对大于传播时间t的回波数据不接受,处理后的数据即去除混响的数据。
5. 工程应用
5.1. 项目概况
溪洛渡水力发电站大坝坝址位于四川省雷波县和云南永善县交界的金沙江下游河段峡谷,是一座以水力发电为主,兼有防洪、拦沙和改善下游船舶航运条件等多种综合效益的巨型水电站,是我国西电东送的重点工程项目。大坝下游二道坝至溪洛渡大桥下游400 m河段为高山峡谷地带,山势陡峻,河谷深切,河道呈V字形河谷,峰谷高差达到1000 m以上。河道因受溪洛渡水电站泄洪的影响,对其进行了河道整治(如图4),整治后对该区域进行1:500地形测量,左岸施测至11号公路(包括公路)高程,右岸与左岸施测高程一致。

Figure 4. Xiluodu for measuring range of downstream river regulation schemes
图4. 溪洛渡下游河道整治施测范围示意图
河道整治后溪洛渡坝下二道坝50 m范围内水下地形呈漏斗型,如图5所示。
5.2. 混响数据的处理
由于溪洛渡坝下二道坝50 m范围内地形呈漏斗型,地形复杂,利用单波束HY1601测量的水深数据,回声波中存在多次回波的叠加,如图6 (左)所示。通过估计水的大致深度计算声波传播时间t,测量过程中对大于传播时间t的回波拒接接受,经处理后的水深数据如图6 (右)所示。
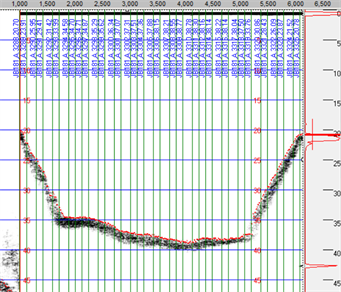
Figure 6. Produces reverberation echo data (left) and after processing the echo data (right)
图6. 产生混响回波数据(左)及经处理后回波数据(右)
水深数据经水位推算后的水下地形数据如图7所示。
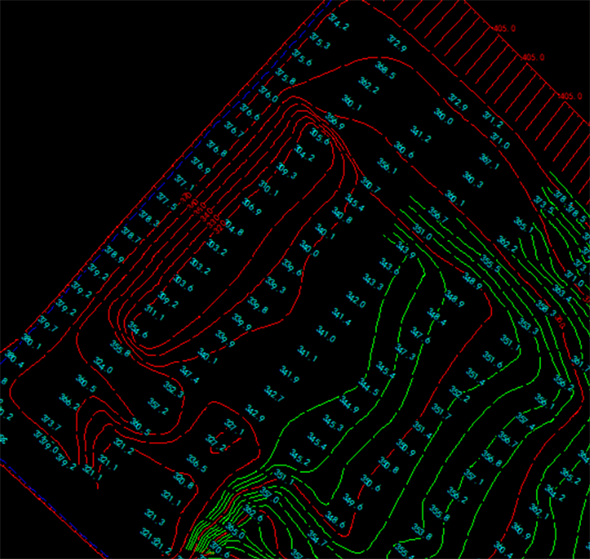
Figure7. Funnel type underwater topography measurement area
图7. 漏斗型测量区域水下地形
水深数据处理后经水位推算后的水下地形数据如图8所示。

Figure 8. Reverberation data processing after the funnel type underwater topography measurement area
图8. 混响数据处理后漏斗型测量区域水下地形
6. 结论
本文根据单波束测深原理及混响的模型,通过预估测量区域的水深深度来计算传播时间t,在测量软件中设置阈值,大于传播时间t后拒绝接受回声波,可消除声波的混响效应,通过溪洛渡坝下二道坝漏斗地形的测量,混响数据经此方法处理后获得了正确的水下地形数据,验证了此方法的正确性。