摘要: 针对在卫星信号易被遮挡的复杂环境下,单GPS系统可见卫星数少、卫星几何构型较差、定位精度不高以及历元可用率较低的问题,本文基于WHU2站的实测数据,对不同截止高度角(7˚、10˚、15˚、20˚、30˚、40˚)下不同卫星导航系统组合模式(GPS、GPS/Galileo、GPS/QZSS、GPS/BDS、GPS/Galileo/BDS、GPS/QZSS/BDS、GPS/Galileo/QZSS/BDS)进行多模伪距单点定位解算和数据处理分析。结果表明,随着截止高度角的增加,可见卫星数逐渐减少,PDOP逐渐变大且波动剧烈,定位偏差逐渐变大且稳定性逐渐变差,历元可用率也逐渐降低,组合系统对单系统的精度改善率逐渐提高。相比于其他卫星模式,特别是单GPS系统,多系统组合GPS/Galileo/QZSS/BDS具有更优的定位性能,即当截止高度角为7˚时,历元可用率高达100%,定位精度优于4 m,改善率达21.8%;当截止高度角为40˚时,历元可用率仍有98.9%,定位精度优于6 m,改善率达27.8%。
Abstract:
In some complex environment where satellite signals are blocked, single GPS system has few visible satellites, poor geometric configuration of satellites, low positioning accuracy and epoch availability rate. Based on the measured data of WHU2 station, under different cut-off angles (7˚, 10˚, 15˚, 20˚, 30˚, 40˚) different combination modes of satellite navigation systems (GPS, GPS/Galileo, GPS/ QZSS, GPS/BDS, GPS/Galileo/BDS, GPS/QZSS/BDS, GPS/Galileo/QZSS/BDS) for multi-mode pseudo- range single point positioning are calculated and analyzed. The results show that with the increase of the cut-off height angle, the number of visible satellites decreases gradually, with the PDOP becoming larger and fluctuating sharply. Meanwhile, the positioning deviation becomes larger and the stability becomes worse, and the epoch availability rate decreases gradually. The accuracy improvement rate of multi-system to single system also increases gradually. Compared with other satellite modes, especially single GPS system, the multi-system combination GPS/Galileo/QZSS/BDS has better positioning performance. When the cut-off height angle is 7˚, the epoch availability rate is up to 100%, and the positioning accuracy is better than 4 m, with the improvement rate up to 21.8%. When the cut-off height angle increases to 40˚, the epoch availability rate is still 98.9%, and the positioning accuracy is less than 6 m, with the improvement rate as 27.8%.
1. 引言
美国全球定位系统(Global Positioning System, GPS)可以为全球用户提供连续的高精度实时导航定位服务,但当观测条件不足时,如在城市峡谷、建筑物密集区、山区和树林等卫星信号易被遮挡的复杂环境中,其标准单点定位(Single Point Positioning, SPP)的可见卫星数、历元可用率、定位精度和定位稳定性显著下降 [1] [2] [3] [4]。随着其他全球卫星导航系统(Global Navigation Satellite System, GNSS)和区域卫星导航系统的不断建设和完善,世界卫星导航进入多星座服务的新时代,组合系统将有助于改善单系统的定位性能 [5] - [12]。我国北斗卫星导航系统(BeiDou Navigation Satellite System, BDS)在2020年6月23日完成北斗三号系统全球组网,并计划于2035年建成更加泛在、更加融合、更加智能的国家综合定位导航授时体系。欧洲伽利略系统(Galileo Satellite Navigation System, Galileo)自2016年提供全球初始运行服务以来,服务能力稳中有升,并计划于2025年开始发射过渡卫星或第二代卫星,2035年完成第二代系统部署。日本准天顶卫星系统(Quasi-Zenith Satellite System, QZSS)在2018年11月开通服务,并计划于2036年实现卫星的升级换代。
近年来,许多专家学者从不同角度分析了全球卫星导航系统的单点定位性能。徐龙威等 [13] 对比分析了单GPS与GPS/GLONASS/BDS/Galileo组合多模系统在不同截止高度角时的单点定位性能;布金伟等 [14] 分析了BDS/GLONASS/Galileo不同组合模式的定位稳定性和定位精度;吴有龙等 [15] 研究了GPS/GLONASS/BDS/Galileo多系统星座融合的性能,并对不同高度角下系统的可用性进行评估。对于区域卫星导航系统,也有部分学者做了相关的研究工作。楼益栋等 [16] 对QZSS两类增强信号在中国区域的性能进行评估;布金伟等 [17] 对BDS/QZSS组合系统在中国和日本及周边地区的定位性能进行评估与分析;Wang Kan等 [18] 对高截止高度角下单频单历元GPS/Galileo/QZSS/IRNSS多系统的RTK定位性能进行分析。
现有研究较少涉及对全球和区域卫星导航系统组合下伪距单点定位精度的分析。鉴于此,本文以WHU2测站GNSS观测数据为数据源,对不同截止高度角下(7˚、10˚、15˚、20˚、30˚、40˚) GPS/Galileo/QZSS/BDS组合系统的标准单点定位精度进行对比分析。
2. 多模伪距单点定位数学模型
在进行多模伪距单点定位时,某历元t可以同时观测到多个系统的卫星信号,则GPS/Galileo/QZSS/BDS的伪距观测方程可以表示为 [19] [20]:
(1)
式中:
代表伪距观测值,单位为米;i代表观测到的第i颗卫星;S分别代表GPS、Galileo、QZSS、BDS系统;
、
分别代表计算得到的卫星坐标、给定观测站的近似坐标,单位为米;c代表光速,
;
、
分别代表卫星钟差、接收机钟差,单位为秒;
、
分别代表电离层延迟、对流层延迟,单位为米。
四系统组合观测误差方程的矩阵形式可以表示为:
(2)
(3)
(4)
式中:i代表第i个观测历元;
代表坐标偏差,单位为米;
代表由于接收机钟差引起的距离改正量,单位为米。
利用最小二乘法对误差方程进行求解得:
(5)
3. 算例分析
本文选取IGS站(WHU2站) 2020年5月12日的观测数据为研究对象。WHU2站的接收机类型为JAVAD TRE_3,天线类型为JAVRINGANT_G5T,能同时接收到BDS、GPS、Galileo和QZSS卫星信号,采样间隔为30 s。进行数据处理时,将截止高度角依次设置为7˚、10˚、15˚、20˚、30˚、40˚,分别对不同卫星导航系统组合GPS (G)、GPS/Galileo (GE)、GPS/QZSS (GJ)、GPS/BDS (GC)、GPS/Galileo/BDS (GEC)、GPS/QZSS/BDS (GJC)、GPS/Galileo/QZSS/BDS (GEJC)进行标准单点定位解算,并将解算得到的不同截止高度角下不同系统的定位精度进行对比分析,主要参数设置见表1。

Table 1. The main parameters setting in GNSS data processing
表1. GNSS数据处理主要参数设置
3.1. 可见卫星数与PDOP分析
3.1.1. 可见卫星数分析
可见卫星数是指接收机能接收到卫星信号的数目,其值是影响定位精度的关键,定位的基本要求是至少能观察到4颗及以上的卫星。图1展示了WHU2站在不同截止高度角下可见卫星数的对比情况,图2展示了24 h内平均可见卫星数随截止高度角的变化情况。如图1和图2所示,可见卫星数出现明显的分层现象,即不论截止高度角取任意角度值,GEJC、GEC、GJC、GC的可见卫星数远高于GE、GJ、G的可见卫星数。当截止高度角为7˚~15˚时,不同组合全天内可见卫星数均在8颗以上,GEJC、GEC、GJC、GC、GE、GJ平均可见卫星数分别为35.6、32.1、29.6、26.1、13.1、10.6颗,可利用卫星数较多;而单GPS系统也能观测到至少5颗以上卫星,平均可见卫星数为7.2颗。当截止高度角抬升至20˚~30˚时,四系统组合和三系统组合全天内可见卫星数均在19颗以上,GEJC、GEC、GJC平均可见卫星数分别为29.5、26.3、25.0颗;双系统组合均在6颗以上,GC、GE、GJ平均可见卫星数分别为21.9、10.4、9.1颗;而单GPS系统最少只能观测到4颗卫星,平均可见卫星数为6.0颗,仅能满足定位的基本要求。当截止高度角提高到40˚时,四系统和三系统全天内可见卫星数均在14颗以上,GEJC、GEC、GJC平均可见卫星数分别为21.4、18.7、18.6颗,观测的冗余量充足,可以提供更为准确的定位信息;双系统则表现出差异,GC仍能观测到至少12颗以上,平均可见卫星数为15.9颗,而GE、GJ与G逐渐趋于一致,最少只能观测到4~5颗卫星,达不到组合的优化效果,且单GPS系统能观测到卫星的时间缩短至不足一天的50%。综合全天内可见卫星数和能观测到卫星的时间,可以简单的得到如下关系:GEJC、GEC、GJC、GC模式普遍优于GE、GJ、G模式,可见性优劣排序为GEJC > GEC > GJC > GC > GE > GJ > G。
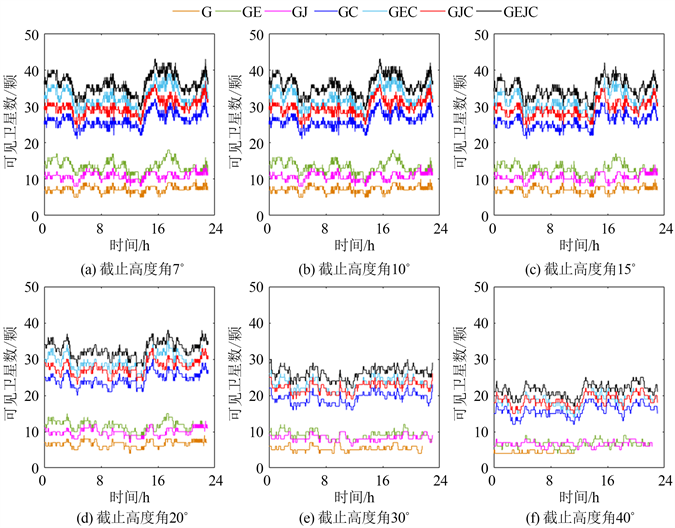
Figure 1. Comparison of the number of visible satellites at different cut-off height angles
图1. 不同截止高度角下可见卫星数的对比情况
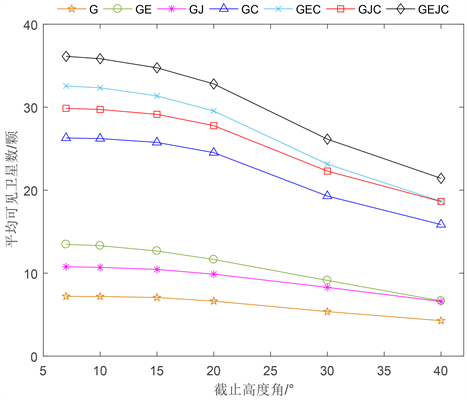
Figure 2. Variation of the average number of visible satellites with the cut-off height angle
图2. 平均可见卫星数随截止高度角的变化情况
3.1.2. PDOP分析
位置精度因子(Position Dilution of Precision, PDOP)表示三维位置定位精度与导航台几何配置关系的一个参数,归因于卫星的几何分布,一般PDOP越小,卫星分布越好,其值小于3为比较理想的状态。对于多GNSS星座的单点定位解算,PDOP是描述测量误差对定位精度影响的度量 [21]。图3展示了WHU2站在不同截止高度角下PDOP的对比情况,图4展示了24 h内平均PDOP随截止高度角的变化情况。如图3和图4所示,PDOP同样出现明显的分层现象,即不论截止高度角取任意角度值,GEJC、GEC、GJC、GC的PDOP远低于GE、GJ、G的PDOP,且时间序列曲线较为平滑,无“毛刺”现象。当截止高度角为7˚~15˚时,不同组合模式全天内PDOP均在4.1以下,GEJC、GEC、GJC、GC、GE、GJ平均PDOP分别为1.00、1.04、1.14、1.20、1.69、2.12,PDOP普遍较低,反映出卫星几何构型较好;而单GPS系统的PDOP在9.1以下,平均PDOP为2.76。当截止高度角抬升至20˚~30˚时,四系统和三系统全天内PDOP均在2.9以下,GEJC、GEC、GJC平均PDOP分别为1.46、1.52、1.63;双系统均在12.8以下,GC、GE、GJ平均PDOP分别为1.71、2.65、3.32;而单GPS系统的PDOP最大达12.74,平均PDOP为4.39,仅能满足定位的基本要求。当截止高度角提高到40˚时,四系统和三系统全天内PDOP均在4.8以下,GEJC、GEC、GJC平均PDOP分别为3.89、4.04、4.56,仍然可以提供较为准确的定位信息;双系统则表现出差异,GC的PDOP均在4.8以下,平均PDOP为3.02,优于四系统和三系统,而GE、GJ与G逐渐趋于一致,GE、GJ、G最大PDOP分别为19.93、19.98、19.86,因数据处理过程中设置了最大PDOP为20的限制条件,部分历元数据已被舍去,故实际情况更差,GE、GJ、G平均PDOP分别为6.36、7.37、8.92,已不再满足定位的基本要求,且单GPS系统的PDOP跳变频繁,稳定性极差。综合全天内PDOP及其稳定性情况,可以简单的得到如下关系:GEJC、GEC、GJC、GC模式普遍优于GE、GJ、G模式,卫星分布程度好坏排序为GEJC > GEC > GJC > GC > GE > GJ > G,与可见性结论保持一致。
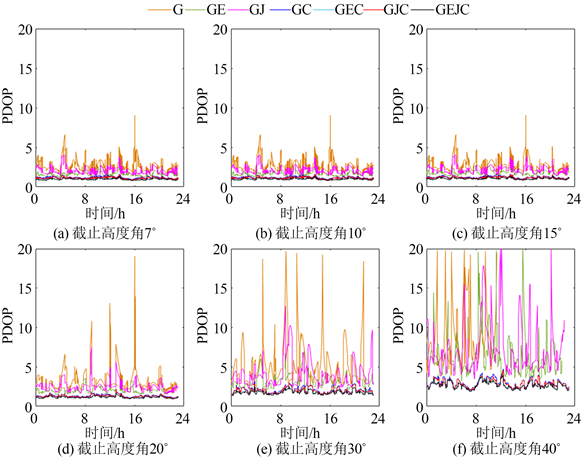
Figure 3. Comparison of PDOP at different cut-off height angles
图3. 不同截止高度角下PDOP的对比情况
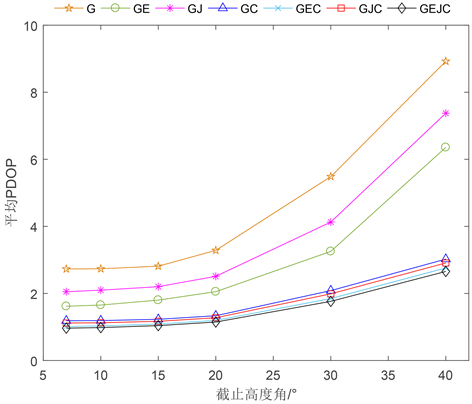
Figure 4. Variation of the average PDOP with the cut-off height angle within 24 h
图4. 24 h内平均PDOP随截止高度角的变化情况
3.2. 定位精度与可用性分析
历元可用率是指在总时间跨度内可以获得位置解的时间跨度百分比 [22] [23]。图5展示了24 h内WHU2站在不同截止高度角下N、E、U方向的偏差和定位偏差对比情况,图6展示了24 h内历元可用率随截止高度角变化的统计结果,表2列出了不同截止高度角下历元可用率的统计结果,图7展示了24 h内历元可用数与定位偏差在截止高度角分别为7˚、40˚下的对比情况。如图5所示,随着截止高度角的增加,偏差曲线稳定性逐渐变差。N方向上,当截止高度角为7˚~20˚时,各模式自身变化不明显,偏差的数值上基本保持不变,模式间存在差异,GEJC总体偏差小,控制在5 m左右,且稳定性优,GE、GJ、GC、GEC、GJC的偏差分别为5.3 m、8.9 m、7.7 m、5.8 m、6.7 m,通过对比可以发现,Galileo卫星的组合较BDS卫星和QZSS卫星,在低截止高度角下可以更有效的改善N方向上的偏差,而G总体偏差大,且稳定性差,多处出现“毛刺”现象,但绝大多数历元符合定位要求;当截止高度角抬升至30˚时,GEJC偏差控制在5 m左右,GE、GJ、GC、GEC、GJC的偏差分别为5.5 m、5.4 m、8.1 m、6.6 m、7.3 m,而G偏差范围在−4.5 m~9.6 m之间浮动;当截止高度角提高到40˚时,GEJC偏差控制在7 m以内,GE、GJ、GC、GEC、GJC的偏差分别为9.1 m、12.0 m、8.3 m、7.0 m、8.1 m,而G偏差范围在−7.4 m~29.7 m之间跳变,稳定性极差,已经无法满足定位需要。E方向上,当截止高度角为7˚~20˚时,GEJC总体偏差小,控制在5 m以内,且稳定性优,GE、GJ、GC、GEC、GJC的偏差分别为5.7 m、7.8 m、6.1 m、5.0 m、6.2 m,通过对比可以发现,Galileo卫星的加入可以有效的改善E方向上的偏差,而G总体偏差大,在−8.6 m~5.9 m之间浮动,且稳定性差;当截止高度角抬升至30˚时,GE表现优异,总体偏差控制在6 m左右,在−2.1 m~3.8 m之间浮动, GJ、GC、GEC、GJC、GEJC的偏差分别为8.0 m、10.2 m、8.3 m、8.8 m、7.7 m,而G偏差范围在−4.7 m~9.5 m之间浮动;当截止高度角提高到40˚时,只有GEJC、GJC能提供有效定位,偏差均控制在9 m左右,GEJC较GJC变化更平稳。U方向上,偏差数值普遍较大,当截止高度角为7˚~20˚时,各模式整体变化平稳,但均存在个别历元产生粗大误差的情况;当截止高度角抬升至30˚~40˚时,组合模式的优势逐渐减弱。从定位偏差来看,GEJC在截止高度角为7˚~30˚时,定位偏差优于5~10 m,且稳定性较其他模式好;在截止高度角为40˚时,定位偏差优于20 m。本文统计的可用历元为有定位输出值且定位偏差变化范围在−5 m~5 m以内的历元。如图6、表2和图7所示,在低截止高度角(7˚~20˚)下,各模式的历元可用率基本保持不变,除GC、GJC外,其余模式的历元基本保证全天可用;在高截止高度角(30˚~40˚)下,随着截止高度角的增大,历元可用率均有所降低,GEJC充分发挥多模组合的优良特性,仍保持历元的高利用率,而单GPS系统骤降至43.5%,不足全天的一半。
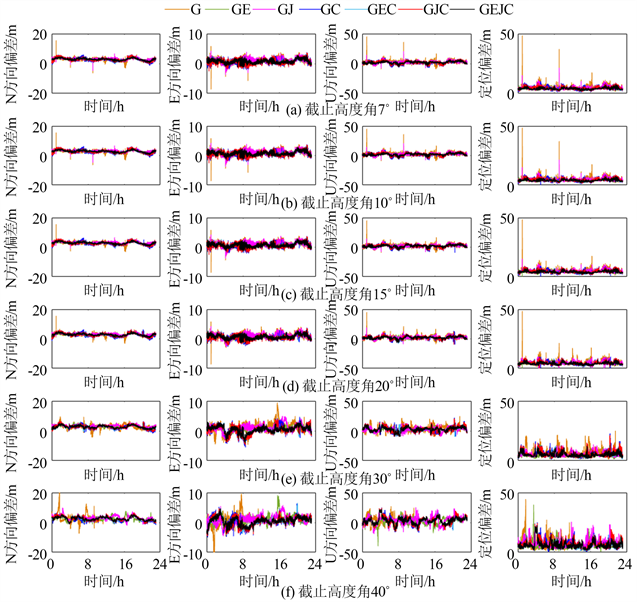
Figure 5. Comparison of deviation of the N, E, U directions and positioning deviation within 1 d
图5. 1 d内N、E、U方向的偏差和定位偏差对比情况
外符合精度反映了定位结果的实际可信度,一般用误差的均方根(Root Mean Square, RMS)来度量。表3列出了WHU2站不同截止高度角下N、E、U方向和三维方向的RMS值以及精度改善率的统计结果,图8展示了WHU2站不同截止高度角下N、E、U和三维方向RMS值的对比情况。如表3和图8所示,不论截止高度角取任意角度值,多系统组合较单系统在定位精度上均有不同程度的提升,N方向上GEC改善效果好,E、U方向上GEJC改善效果好,四系统较双系统在定位精度上也均有不同程度的提升,四系统较三系统对定位结果有轻微的影响且N方向和E、U方向上的改善情况不同步。当截止高度角为7˚~20˚时,7种模式下N、E、U方向的RMS值均小于5 m,GEC较G、GEJC较G、GEJC较GC的改善效果显著,在N方向精度上分别提高了4%~6%、3%~5%、3%~5%,在E方向精度上分别提高了26%~33%、27%~32%、6%~8%,在U方向精度上分别提高了26%~32%、29%~35%、19%~24%,而GEJC较GEC的改善效果不显著;当截止高度角抬升至30˚时,G、GC、GJC在U方向上的RMS值分别为5.66 m、5.67 m、5.64 m,其余模式下N、E、U方向的RMS值均小于5 m,GE的整体定位性能好,三维方向的RMS值小于5 m,GEJC较G的改善效果最佳,在N、E、U方向精度上分别提高了12.0%、36.4%、20.3%;当截止高度角提高到40˚时,7种模式下N、E方向的RMS值均小于5 m,而U方向的RMS值在5~8 m之间,GE、GEC、GEJC的整体定位性能较好,GEJC较G的改善效果最佳,在N、E、U方向精度上分别提高了34.7%、52.3%、23.4%。
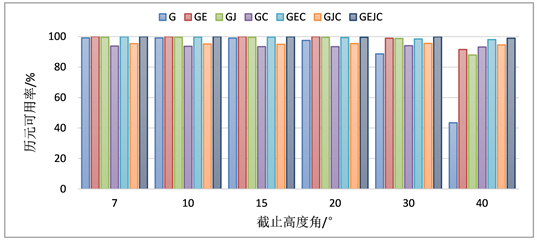
Figure 6. Statistics of epoch availability rates within 24 h
图6. 24 h内历元可用率统计结果
Table 2. Statistics of epoch availability rates at different cut-off height angles
表2. 不同截止高度角下历元可用率统计结果
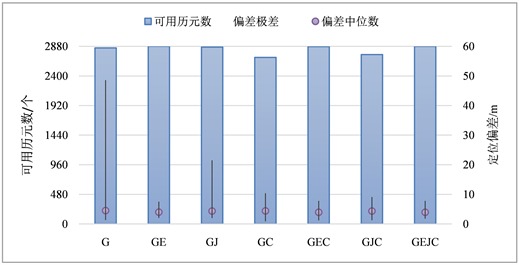 (a) 7˚
(a) 7˚ 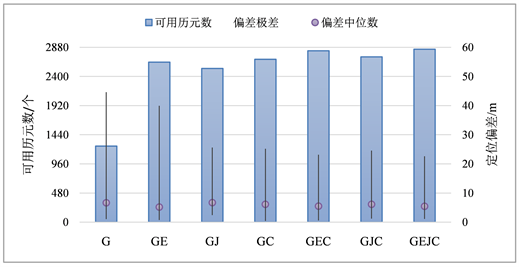 (b) 40˚
(b) 40˚
Figure 7. Comparison of available epochs and positioning deviation between the cut-off height angle of 7˚ and 40˚
图7. 24 h内历元可用数与定位偏差在截止高度角为7˚、40˚时的对比情况
Table 3. Statistics of RMS values and accuracy improvement rates of N, E, U and three-dimensional directions at different cut-off height angles
表3. 不同截止高度角下N、E、U和三维方向的RMS值以及精度改善率统计结果
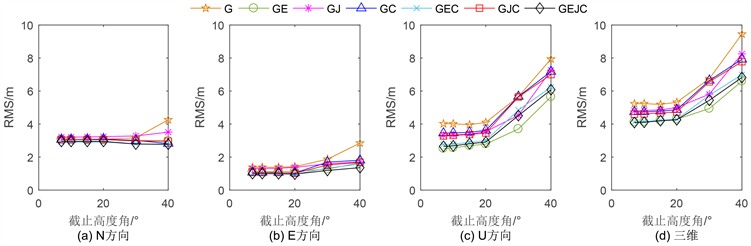
Figure 8. Comparison of RMS values of N, E, U and three-dimensional directions
图8. N、E、U和三维方向的RMS值对比情况
4. 结论
本文基于WHU2站一天的GNSS数据,首先对其进行多模伪距单点定位解算,然后对比分析了不同截止高度角下的可见卫星数与PDOP情况,最后统计分析了不同模式下的定位精度与可用性,可以得到以下结论:
1) 随着截止高度角的增加,可见卫星数逐渐减少,PDOP逐渐变大且发生漂移。综合全天内可见卫星数、能观测到卫星的时间、PDOP及其稳定性情况,可以发现GPS/Galileo/QZSS/BDS伪距单点定位较其他模式具有更多的可用卫星和更小的PDOP,这足以说明在武汉地区GPS/Galileo/QZSS/BDS组合系统的可见性与空间几何构型均优于其他系统,是获得更高定位精度和可靠性的前提条件。
2) 随着截止高度角的增加,定位精度和可用性逐渐变低,组合系统对单系统的精度改善率逐渐提高。GPS/Galileo/QZSS/BDS较其他模式,整体定位性能高,当截止高度角为7˚~20˚时,定位精度优于5 m,在N、E、U各方向上的定位结果平稳;当截止高度角为30˚、40˚时,定位精度优于5~10 m,仍能达到定位要求。在武汉地区GPS/Galileo/QZSS/BDS组合系统历元可用率高至几乎全天可用,改善效果显著,有效解决了单GPS系统定位偏差发生突变以及历元可用率骤降的问题。
参考文献