1. 引言
丹霞地貌是以陆相沉积岩为主的红色地层在地质作用下产生的具有陡崖/坡的地貌,在我国东南、西南和西北广泛分布 [1] [2] [3]。许多丹霞地貌四周均发育陡崖,其顶部相对周围地势较高,形成类似“孤岛”的特殊地理环境 [4] [5]。由于隔离性强、人类活动弱,一些孤岛具备了高异质化的生境,成为景观和生物多样性的集聚地,富含了丰富的生态和地理信息 [6] [7] [8] [9],具有很高的研究价值。
由于“孤岛”顶部相对高差小,温差不明显,难形成植物垂向分异,但不同部位形态不同,如“孤岛”中部平缓而边部陡峭,易产生植物水平分异 [4] [10] [11]。以湖南崀山蜡烛峰和辣椒峰为例,其顶部植被具环状分带格局,自中部向边缘呈现出乔木、灌木、灌木–草本过度的趋势。为解释这种分带性,前人选取了条件近似的“半孤岛”系统开展了植物、土壤样方研究,认为这种分带性可能受土层厚度、肥沃程度以及含水量等多因素控制。例如,中部土层比边部土层含水量高,故中部可生长旱生性乔木、小乔木,而边部只能生长极度耐旱的草本、苔藓、地衣等植物。
虽然前人针对“孤岛”植被水平分异给出了适当解释,但由于我国丹霞地貌分布广,不同地区的地质、地理条件存在差异,且“孤岛”数量多,规模变化大,之前的研究仅针对人类可进入的“半孤岛”展开,而实际中,很多“孤岛”无法进入,也无法开展系统研究,使上述解释可能存在一定片面性。
四川省南部是我国重要的丹霞地貌发育区,为开展针对丹霞顶部“孤岛”生境的研究提供了大量实验对象。然而,这些对象中很大部分是不可进入的,给调查工作造成巨大困难。为解决样地不可进入的难题,本文利用先进的无人多载具协同调查技术,在四川南部笔架山开展了针对丹霞顶部小型“孤岛”生境的地表光谱采集实验,利用数据处理、对比、定性分析等方法,对“孤岛”生境系统中的地物类型、地物水平方向变化特征,以及水平方向上土壤有机质变化特征进行了探讨,为山地特殊生境研究提供了一种全新的技术与研究方法。
2. 地理背景
2.1. 区域地理背景
本文研究区笔架山位于四川省东南部泸州市合江县(图1),大地构造位于四川盆地南缘。合江县地理坐标介于东经105˚32'至106˚28',北纬28˚27'至29˚01',总面积2414 km2,其西部与江阳区、纳溪区、泸县相邻,东部与重庆市江津区接壤,北部与永川区接壤,南部与贵州省赤水市、习水县毗邻,距泸州市38.7 km,距成都市260.1 km,距重庆市109.2 km。该县境内山脉大体以长江为界:江北属华蓥山南缘丘陵带,主要为海拔300~400米的孤丘、坳谷和谷间平坝;江南属娄山山脉支系,主要为200~300 m的半山脉和一些中、低断头山。县境内有长江、赤水河两大水系:长江自神臂镇大岸溪入境,至望龙镇踩溪出境,境内长55公里,有观音溪、赤水河、小洋洞等大小河溪8条注入;赤水河自九支镇截角垭入境,至合江城南注入长江,境内长62公里,有沙溪河、马哮洞、佛龙溪、习水河等大小河溪8条注入。该县属亚热带湿润气候,日照充足,雨量充沛,四季分明,常年平均气温18.2℃,无霜期357天。
2.2. 笔架山地理背景
笔架山古名安乐山、少岷山,距合江县城7公里,面积约5.6 km2,呈近东西走向,有三座矗立的山峰,最高点海拔698 m。山上森林覆盖率约为68%,年均气温16.2℃,降雨量1500毫升。距其东6 km为赤水河、习水河同长江交汇口(图1)。笔架山是典型的丹霞地貌,出露白垩纪湖相沉积岩,成岩期距今约1亿年,隆起期距今约4百万年,岩性主要为红色砂岩、泥岩。地层中可见明显水平层理,具有良好观赏效果。由于地处亚热带湿润气候区,气温较高、雨量充沛、植被茂密,导致山顶风化剥蚀严重,形成了山势陡峭,岩石裸露,奇峰奇壁,奇石奇洞的景观特征。
3. 研究方法
3.1. 无人多载具协同调查流程
当前,无人调查主要依托装载有不同传感器、探测器或视频、音频接收器的无人机、无人船、无人车等无人载具进行。调查方式既可以为无人单载具独立调查,也可以为无人多载具协同调查。协同调查的方式主要为数据、信息、指令间的交互式协同,少量为车载无人机的运输式协同。遗憾的是,针对一些车载难以进入或抵达的地区,仅凭信息交互式协同难以完成调查任务。
2021年5月,北京水云星晗科技有限公司提出了一种基于无人机飞行运载能力与无人车长续航和接触式测量能力相协同的调查方式 [12]。该方式包括如下步骤:1) 无人机吊载无人载具至指定位置;2) 无人机协助无人载具在指定位置降落;3) 无人载具在指定范围开展调查工作;4) 无人机回收无人载具;5) 无人机吊载无人载具返航。
2021年6月,北京水云星晗科技有限公司对其调查方式进行了完善,增加了预调查、吊载中信息采集与处理;调查中无人机预调查;调查中多载具吊载;载具重新部署等新步骤。其中,预调查是指无人机拟吊载无人载具进入某一区域前,先对该区域进行数据采集,通过对采集数据进行处理与分析,判断是否有必要吊载无人载具进入该区域实施调查,或在该区域内进一步优选拟调查的具体部位;吊载中信息采集与处理是指无人机在吊载无人载具过程中利用自生传感器、探测器、视频采集器等对拟调查区域中的具体部位进行数据采集,通过对采集数据进行处理与分析,判断是否有必要对该部位实施调查,或确定无人载具的具体降落位置;调查中无人机预调查是指无人机协助无人载具降落后飞往其它拟调查区域并对该区域实施预调查;调查中多载具吊载是指无人机协助一个无人载具降落后,再吊载另一个无人载具至拟调查的区域,并协助该载具降落;载具重新部署是指无人载具完成调查任务后,或在调查过程中遇到无法逾越的障碍时,无人机吊载无人载具至下一个拟调查的区域,并协助该载具降落,或吊载无人载具跨越障碍后,协助其重新降落。新的调查流程如图2所示。本研究采用的调查方法以北京水云星晗科技有限公司2021年6月改进后的调查方法为基础,省略了“预调查”“吊载中信息采集与处理”“调查中无人机预调查”和“调查中多载具吊载”4个步骤。
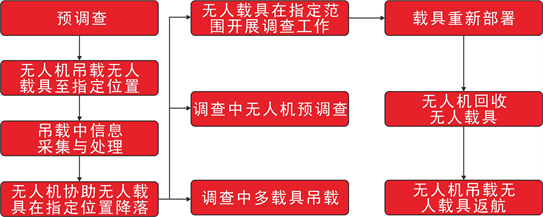
Figure 2. Flow chart of unmanned multi-vehicle collaborative investigation
图2. 无人多载具协同调查流程图
3.2. 无人多载具协同调查系统
本研究的调查任务采用北京水云星晗科技有限公司自主集成研发的无人多载具协同调查试验机系统完成。该系统由飞行运载器、地面巡检器以及电磁悬索装置三部分组成(图3)。飞行运载器为自行组装的四旋翼遥控无人机,有效载荷重量1.6 kg,有效遥控距离100 m,单电池最长续航时间25 min。地面巡检器为改造后的四轮无人遥控越野车,搭载视屏实时传输系统、微型电脑和可见光–近红外光谱仪,车底盘装有麦克纳姆轮,可实现侧方平移,全车重量1.3 kg,有效视频传输及遥控距离50 m,单电池最长续航时间35 min。电磁悬索装置由电磁铁充当,重量0.2 kg,由无人机供电。地面巡检器装载的可见光–近红外光谱仪为美国海洋光学公司生产的USB4000微型光纤光谱仪,通过巡检器上的微型电脑控制。该光谱仪的相关参数如表1所示。
3.3. 数据采集对象及过程
考虑试验机系统稳定性、续航时间以及遥控距离等因素的限制,本研究调查任务选择笔架山顶一处小型丹霞岩石露头实施(图4)。该岩石露头呈阶梯状,顶部有三处平台,第1处平台最低,第3处最高(图4)。
由于第1处平台为完全岩石裸露,表面基本无植被覆盖,故没有实施空降调查。第2、第3平台有植被覆盖,因此在第2和第3平台实施了空降调查(图5)。为节约设备电能,采用剖面取代面积测量,即巡检器以平台边缘着陆点为起点,沿固定方向前进,并以15 s间隔进行光谱测量,巡检器接近平台另一边缘时停止测量并沿反方向回到初始着陆点,再由无人机负责回收。

Figure 3. Photo of unmanned multi-vehicle collaborative investigation system
图3. 无人多载具协同调查系统

Table 1. Technical parameters of USB4000 micro optical fiber spectrometer from Ocean Insight
表1. 美国海洋光学公司USB4000微型光纤光谱仪技术参数
地面巡检器装载的光谱仪由位于巡检器底部的小型氙灯提供光照,并由一小段光纤将地表地物反射的氙灯能量引入光谱仪。为测量并获得地物反射率,测量前先使用光学白板对仪器进行了定标。定标结束后,飞行运载器首先利用电磁悬索将地面巡检器吊载至第2平台,随后地面巡检器开始针对第2平台进行测量。为节约电能,在地面巡检器测量时飞行运载器暂时返航。待第2平台测量完成后,飞行运载器将地面巡检器重新部署于第3平台,并再一次返航。待第3平台也测量完成后,飞行运载器回收地面巡检器,并吊载巡检器一起返航。
4. 结果
本研究共对丹霞顶部2个平台的2条剖面进行了光谱测量,其中第1剖面位于平台2上,第2剖面位于平台3上。第1剖面含11个测量点,第2剖面含15个测量点。利用OceanView软件对所测光谱数据进行平滑后,再去掉400 nm之前和1000 nm之后的噪声较强的波段,得到26条光谱曲线(图6)。

Figure 4. Photo of investigated object
图4. 被调查对象的野外照片
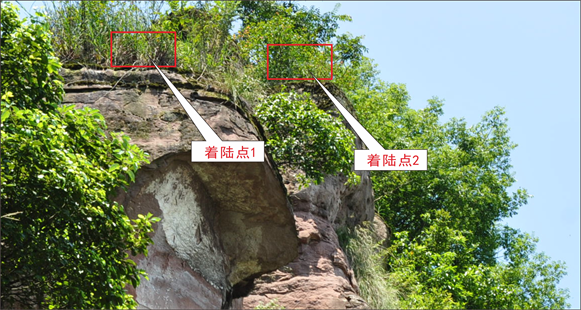
Figure 5. Photo shows the landing sites
图5. 巡检器着陆位置示意图
5. 讨论
5.1. 地物类型识别
由图6可知,两条剖面上的光谱曲线从形态上可以划分出5种类型(图7),第1类在550 nm有一个微小的反射峰,在700 nm左右有一个吸收峰,从700 nm之后反射率开始上升并在800 nm之后保持稳定。第2类曲线在500 nm之前平缓上升,在500~600 nm有快速上升,600 nm之后又缓慢上升。第3类曲线一开始即以较快速度上升,在700 nm之后上升速度变缓。第4类曲线与第一类曲线类似,在550 nm处曲线有小幅度上扬,在700 nm处有小幅度下降,随后又快速上升,在800 nm之后平缓上升。第5类曲线在700 nm之前上升幅度很小,从700 nm之后有较快幅度的上升,在900 nm之后上升速度变缓。
通过与标准光谱库(星晗光谱库公众版,http://www.bjsyxhkj.com/)中的光谱进行比对可知,第1类光谱为植物叶片的光谱,第2类为典型丹霞红色砂岩的光谱,第3类为土壤的光谱,第4类为苔藓植物的光谱,第5类为干枯苔藓的光谱。由此可知,在2处丹霞顶部均发育绿叶植物、苔藓,同时也有土壤和裸露的红色砂岩。

Figure 6. Spectra acquired by unmanned ground vehicle
图6. 巡检器采集的光谱曲线
5.2. 水平方向地物变化特征
前人研究认为,丹霞顶部“孤岛”可出现明显的分带现象,表现为从中部到边部呈现从乔木到灌木再到草本、苔藓的过度,也可以是从较厚土层向较薄土层,最后完全变为裸露岩石的过度。在本研究中,巡检器从位于“孤岛”边部的着陆点开始沿固定方向进行剖面测量,到另一边缘后返回。由于剖面穿越了“孤岛”,可以反映整个“孤岛”从边部到中部再到边部的地物变化情况。
结合图6和图7,对剖面1和剖面2上探测到的地物类型进行列表(表2)分析后发现,无论剖面1还是剖面2,均未表现出地物对称分布的特征,即不存在环状分带的特征。如剖面1中,虽然中部主要以绿叶植物为主,含少量苔藓,但两处边缘的地物其中之一为“土壤”另一边为“岩石”;又如剖面2中,两处边缘一处为“绿叶植物”另一处为“土壤”,中部却出现了裸露的岩石,这与前人提出的中部土层厚、边部土层薄的观点正好相反。此外,从整体上看,剖面1和剖面2中的绿叶植物更靠近着陆点一侧,另一侧则更多为苔藓植物。
5.3. 土壤有机质含量的定性分析
前人在可见光–近红外光谱反演土壤有机质方面已开展了大量研究 [13] - [18],这些研究依靠获取的地表土壤光谱或成像光谱数据,配合实验室分析结果,运用不同的含量反演模型,进行了土壤有机质含量的反演,取得了良好的应用效果。
遗憾的是,本研究由于缺少对土壤样品的化学分析结果,难以构建土壤有机质的定量反演模型,但Chen et al. (2020) [18] 发现,土壤有机质含量与其在745 nm到840 nm之间的反射率呈明显负相关,特别是与780 nm处的反射率负相关最显著。因此,对本研究中测量的5条土壤光谱在780 nm处的反射率进行了对比(表3)。针对剖面1,靠近中部的土壤在780 nm处的反射率分别为0.204和0.160,均低于边部土壤样品在相同波长的反射率0.425。针对剖面2,靠近中部的土壤在780 nm处的反射率为0.184,而边部的土壤样品在相同波长的反射率为0.414。由于780 nm处的反射率与有机质含量呈负相关,中部土壤在该波长的反射率均低于边部土壤,因而说明中部土壤的有机质含量高于边部土壤的有机质含量,即中部土壤比边部土壤更“肥沃”。

Figure 7. Different types of spectra
图7. 不同类型的曲线对比图
Table 2. Objects detected along the two profiles
表2. 两条剖面上探测到的地物类型
Table 3. Reflectance at 780 nm wavelength of five soil samples
表3. 5件土壤样品光谱在780 nm处的反射率情况表
6. 结论
针对丹霞顶部“孤岛”不易进入的问题,利用无人多载具协同调查技术,配合地物光谱测量,对四川南部笔架山小型“孤岛”系统的地物类型、地物水平分带和土壤有机质水平变化进行研究。在地物类型方面,发现笔架山“孤岛”上存在4类地物:土壤、红色砂岩、绿叶植物和苔藓。在地物水平分带方面,未发现地物分带性,也未发现土层厚度向边部减薄的现象,与经典丹霞顶部水平分带模式存在差异。在土壤有机质方面,发现“孤岛”中部土壤有机质含量高于边部土壤,即中部土壤比边部更“肥沃”。研究表明,笔架山顶部小型“孤岛”系统比经典丹霞顶部系统分异更加复杂,也说明未来针对“孤岛”系统的研究应更加全面,而无人多载具协同调查技术则为全面研究提供了一种新的手段。
致谢
感谢本刊编辑的辛勤劳动和审稿人提供的宝贵修改意见。
基金项目
本研究受国家自然科学基金重点项目(42030306),北京水云星晗科技有限公司研究开发项目(RDP2021001),和四川景观与游憩研究中心项目(JGYQ2021026)联合资助。
NOTES
*通讯作者。