1. 引言
交通灯智能控制系统是在交通信号灯系统基础上研制而成的交通安全应急信号控制系统。它通过实时监测交叉路口的信号灯,并根据交通信号灯发生的变化,调整交通信号灯的工作状态,及时将车辆从路口分流或避让开,将可能发生事故的车辆和行人从交叉路口移出或者避让,从而减轻交通伤亡、保证交通顺畅、保障交通安全,保护交通参与者和乘客的安全。交通灯智能控制系统由路口车流智能感应系统和交通灯智能控制器两部分组成,前者是通过传感器或者摄像头采集路口的交通状态信息,实时监测交叉路口的交通状况,后者则根据交通流的变化,对交通信号灯工作状态进行调整,从而使交通信号灯工作在合理的状态下。
路口车流智能感应系统通过在道口安装智能感应探头,对车辆进行实时采集数据并上传至服务器,为交管部门提供车辆信息、车牌车型及交通参数等相关数据信息,并提供智能决策分析及交通指挥等功能。通过车流智能感应系统,能够了解道路运行状态及实际交通流量,为交通指挥部门提供信息参考,提高交通管理的科学性和针对性,进而保障道路交通的安全。
而交通灯控制一般有两种方式,第一种是定时控制,是利用交通灯的工作原理,按照预先设定的时间和路线,对各个交通灯在一定时间内进行定时的开、关。第二种是自适应智能化控制,是通过实时获取交叉路口的交通流信息(包括各相位车道的排队情况、车辆的速度等等)建立路口的交通状态图,根据实时信息动态调节交通灯的运行情况,控制交通灯的相位从而实现对各个交通灯的开启与关闭。
交通灯定时控制虽然安装和实现比较简单,但由于在定时控制方式下,交通灯的变化周期是固定的,只能适用于路口情况比较简单、各时段交通流变化不大的路口,不能实时调控交通流和缓解交通拥堵压力。而根据近年发布的《道路交通信号灯设置与安装规范》,2021年起多地开始采用新国标红绿灯。新国标红绿灯有两大变化,即统一红绿灯样式,取消读秒和黄灯。新国标红绿灯的变化是为了适应现有交通灯系统的智能化发展方向,这种取消倒计时的红绿灯装置能更好地配合适应智能交通信号控制器,根据交通流量动态更新信号灯的切换,大大提高交叉口的交通效率,从而缓解道路压力。
2. 国内外现状
智能化交通控制系统主要是从采用了交通灯指挥路口人流车流的通过开始发展起来的。1975年,最早使用交通灯控制交通的英国首先提出了SCOOT系统(Split, Cycle and Offset Optimization Technique) [1],通过对交通流进行实时监测,计算出路口交通量相关数据,实时预测路口车辆,基于预测数据对交通信号灯的配时方案进行优化,从而减少车辆的平均延误时间。SCOOT系统是基于数学模型建立起来的,复杂交通模型的建立对于数学模型的精确度和交通流数据精度要求较高,对于复杂路口环境的适应性较差。不同于SCOOT系统,澳大利亚提出的SCATS (Sydney Coordinated Adaptive Traffic System)系统 [2] 无需建立数学模型,而是根据实际交通流数据从不同配时方案中选择最合适的方案从而调整交通灯的周期、绿信比等参数,SCATS系统的预存配时方案需要根据实际道路交通状况定时更新,且对于突发的交通状况缺乏适应性。与国外相比,中国的智能交通控制系统起步较晚,但发展较快。发展初期主要以引进国外优秀控制系统为主,比如北京和上海先后引进了SCOOT系统和SCATS系统,并结合国内城市交通流本身特点,研发了很多用于交通领域的技术成果,在缓解交通拥堵方面取得了显著成果。现阶段随着国内道路网的进一步发展和车辆数目的迅猛增长,将模糊控制理论、遗传算法、神经网络等应用在交通灯智能化控制系统中。2008年提出的一种基于模糊算法的智能控制系统 [3] 通过分析视频监控数据,利用模糊算法计算每个车道的通行时长。黄向党提出一个采用多指标控制策略,基于遗传算法进行多目标优化组合的交通灯配时策略 [4]。2017年董海龙等人利用模糊神经网络控制器实现绿灯延时,并利用人工鱼群算法对模糊神经网络参数进行优化,自动调节信号周期,实现五岔路口多相位变相序的智能控制 [5]。2018年邓丽云等人提出了一种基于模糊推理规则的单交叉路口智能交通灯系统 [6],该系统根据模糊控制工作过程,经过模糊控制规则制定,再经解模糊得到绿灯延时模糊控制查询表,通过等待车队长和通行车队长查表得到绿灯延时进行红绿灯控制。2020年徐成提出了基于视频的道路车流量检测算法和智能交通灯不定顺序控制算法 [7],实时获取当前各个车道车流量状况,对各个车道的初始绿灯时长做出优化,使用组合的方法计算出最佳通行顺序。
现行的交通灯系统配时方案基本是固定的,在相序不变的情况下,调整各相位的绿灯时间,从而提高交叉口道路资源利用率。但固定配时方案存在两个明显的弊端:1) 同一个周期内各相位绿灯时长固定;2) 同相位不同方向车辆通行时长差异性大。比如同相位内,由南向北方向车道所有车辆完全通过路口的通行时间为1分钟,而由北向南方向车道的通行时间为20秒,根据当前交通灯控制方案,南北方向的通行时长会被设置为较长的1分钟以保证由南向北方向车道能通行完毕,那么当由北向南方向车辆通行完毕之后,会造成由北向南方向车道大约40秒的空等期,严重降低了道路资源利用率。
3. 参数描述
交叉路口交通灯控制系统多采用相位控制来进行路口交通流通行控制。在交通灯控制系统中经常使用到的控制参数包括相位、周期、相序等。
相位:信号相位指的是在一个交通灯的时间内一起得到道路通行权力的一条或多条道路的信号灯状态 [8]。国内应用较为广泛的是四相位和六相位控制模型。
周期:所有相位依次出现一遍的总时长,即交通灯所有灯色均出现一次的总时长,一般根据交通流量和饱和程度来确定,通常还要加上绿灯相位的损失时间。
相序:相位出现的顺序,即在一个周期中各个不同相位所代表的交通流通过路口的顺序。通常情况下一个路口交通灯的相序是固定的,但是如果在一个各相位交通流不平衡的路口,通过调整相序能够有效提高路口的通行效率,减少拥堵。
4. 算法描述
针对上文提出的现行固定配时方案的弊端,本文提出动态更新相序和时长的交通灯智能控制算法,采取交通灯自适应控制方式,利用路口车流智能感应系统获取路口实时流量信息,将接收到的车流信息输入交通灯智能控制器,通过实时计算优先相位和关联相位,并选取一个当前状态下的最优控制方案来调整交通灯的相位和相序,改变相位的绿灯时长,从而避免固定配时方案下的空等现象,提高道路的资源利用率。
4.1. 交叉路口模型
本文以十字交叉路口作为例,如图1所示,十字交叉路口有4个方位(东E、西W、南S、北N),每个方位上有3种不同车道(以方位北N为例,分别为右转车道RNW、直行车道RNS、左转车道RNE),我们用Rij表示初始方位为i目标方位为j的相位,例如RWE代表的是由西向东直行相位,由于大多数交通灯控制系统对右转车道不做控制,所以忽略掉4条右转车道,合计有8种不同相位。
基于实际情况,我们做出如下设定:
1) 在每个方位的每个相位上,基于路口车流智能感应系统获得各相位的排队车辆数目;
2) 右转车道不做考虑;
3) 每个相位的绿灯时长的取值在
区域内;
4) 行人的通行不在本系统考虑范围内。
4.2. 算法设计
4.2.1. 计算初始绿灯时长
在初始阶段,根据路口各车道排队车辆的数目确定各相位的初始绿灯时长:
(1)
其中,为相位的初始绿灯时长;为车道信号灯变换时排在最前的车辆通过路口的时长(包括起步、延迟、行驶过路口等),按照路口实际情况进行设定,时长与路口的宽度成正比,按照实际观测情况设定为直行路口10秒,转弯路口15秒;为相位的平均排队车辆数目;为非首位车辆通过并驶入到目标路口的平均时长,按照实际观测情况设定为统一值3秒;
和
分别为初始方位i和j的车道数目。
同一相位若初始方位的车道数目
大于1,根据实际情况车辆排队将会在每个车道趋于等同,则可取各车道排队车辆的平均值作为此相位的平均排队车辆数目
。初始方位i的车道数目
和目标方位j的车道数目
如果不相等,则根据初始车道汇入目标车道的实际通过时长,将初始绿灯时长乘以参数
以反映实际情况。
根据公式(1)得到的相位
的初始绿灯时长
如果在
区域内,则取
为此相位的初始绿灯时长;如果
,则取
为此相位的初始绿灯时长;如果
,则取
为此相位的初始绿灯时长。
4.2.2. 选取优先相位及关联相位
根据路口各相位的初始绿灯时长选取优先相位为当前相位
,初始绿灯时长越长,则优先级越高(即平均排队车辆数目最多的相位为首选优先相位),假定优先相位为
,即由北向南直行相位,选取
为当前相位。
下一步为确定当前相位
的当前关联相位
。关联相位指的是能与当前相位同时通行而不会产生冲突的相位,例如由北向南直行相位
的关联相位有3个,分别是:初始方位相同的左转相位
,目标方位相同的左转相位
,初始方位和目标方位均相反的直行相位
;由北向东左转相位
的关联相位有3个,分别是:初始方位相同的直行相位
,目标方位相同的直行相位
,初始方位和目标方位均相反的左转相位
等。根据8个相位的列举可以形成关联相位表,用以存储各相位的关联相位。
从关联相位表中选取当前相位
的关联相位形成当前候选相位列表,根据列表中各相位的初始绿灯时长选取优先级最高的相位为当前关联相位
,此时当前相位和当前关联相位可以同时通行而不发生冲突。同一时刻至多有2个相位同时通行。若其中某一个相位先结束,则将剩余相位设为当前相位
,并从剩余未被挑选的相位中根据关联相位表选择
的优先级最高的关联相位,重新计算得到当前关联相位
。剩余未被挑选的相位中若已无当前相位的关联相位,则关联相位不进行设置直至当前相位结束。若两相位同时结束,则从剩余未被挑选的相位中选择一个优先级最高的相位设为当前相位
,并计算得到当前关联相位
。以此类推,直至本周期内所有相位均被选择,本周期结束。
下一个周期基于路口车流智能感应系统获得当前车流数据,重新计算各相位的初始绿灯时长,确定相位优先级,选取当前相位和当前关联相位,进行新周期的计算。
4.2.3. 选取最优方案
由于一个相位的关联相位有多个,优先级有可能相同,而每一步选取的关联相位会影响到下一步的相位选取,所以一个周期的可选相序方案将有可能有多个。例如,各相位的初始绿灯时长如表1所示,选择初始当前相位时可选择
或
(其初始绿灯时长均为70秒),由第2步的当前相位及关联相位选取规则得到本周期内的可选相序方案有4个,其相序和通行时间如图2所示,根据通行时间最短的原则选取最优相序方案,可以选择方案1或者方案3。

Table 1. Original green-light duration of phases
表1. 各相位初始绿灯时长
4.2.4. 算法描述
基于上述初始绿灯时长计算公式、优先相位及关联相位选取规则及最优方案选择策略,本文提出的动态更新相序及时长的交通灯智能控制算法,其流程如图3所示,图3(a)描述了单个周期内具体相序方案的通行顺序和时长计算流程,图3(b)描述了整个交通灯智能控制算法的主体流程。
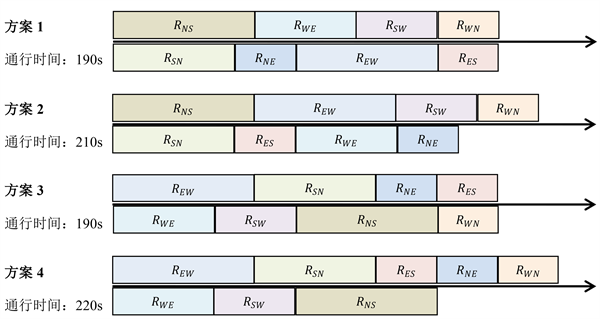
Figure 2. Example of phase sequence options
图2. 可选相序方案示例
5. 实验
为验证本文提出的动态更新相序及时长的交通灯智能控制算法DPA的有效性,本文进行了对比仿真实验,将其与固定相序和时长的交通灯控制算法FPA、针对高峰和闲时进行分时段控制的算法TDA进行对比。
本文的实验环境为:单机,处理器为Intel(R) Core(TM) i5-8250U CPU @ 1.60 GHz 1.80 GHz,内存为8 GB,操作系统为64位 Windows 10,仿真程序使用Python编写,Python版本号为3.7.10。本文实验采用十字交叉路口作为模拟交通路口,除去右转车道后总计8个交通灯相位,各相位车道数目均为1。
由于路口车流智能感应系统较难配备,本文通过随机生成车流数据对交叉路口各相位车流进行模拟仿真。随机数据分为8组(6组交通高峰期,2组交通闲时期),每一组数据包含40个交通信号灯周期。在每个周期的数据里,包含随机生成的8个相位的实时排队车辆数目,交通高峰期每个相位的的排队车辆数目在0到30之间,交通闲时期每个相位的排队车辆数目在0到10之间。
三种不同控制算法的通行时间总长比较如图4所示,图中横坐标表示8组实验,纵坐标表示每组实验中所有周期车流全部通行完毕的总时长,其中,实验1-实验6为交通高峰期实验组数据,实验7-实验8为交通闲时期数据。由图中可以看出,无论是交通高峰期还是交通闲时期,动态更新相序及时长的DPA算法的总通行时长均为最短,忙闲时段分别控制的TDA算法次之,最长的是固定相序和时长的FPA算法。平均通过时间DPA算法比TDA算法节省了509秒,比FPA算法节省了1253秒。相较于FPA算法,DPA算法在交通闲时期节省时间更多,优越性体现得更为明显。相比于后两种算法,本文提出的动态更新相序及时长的交通灯智能控制算法显著减少了总通行时长,提高了道路的资源利用率和通行效率。
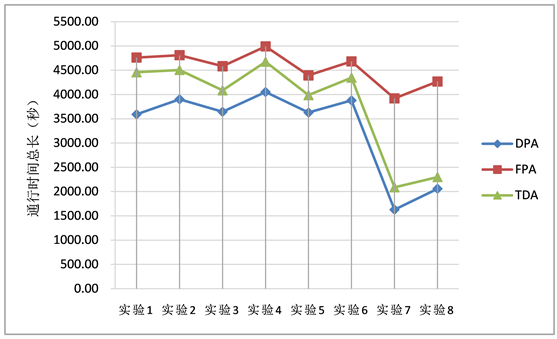
Figure 4. Comparison of total pass time
图4. 通行时间总长比较图
6. 结语
本文针对固定配时方案下的空等和同相位不同方向交通流不平衡的现行状况,提出了动态更新相序和时长的交通灯智能控制算法。基于交通路口实时流量信息,通过实时计算优先相位和关联相位产生一个当前状态下的最优控制方案来调整交通灯的相位和相序,改变相位的绿灯时长,从而避免了固定配时方案下的空等现象,调节不均衡交通流,并进一步通过实验表明本算法显著减少了总通行时长,提高了道路的资源利用率和通行效率。
基金项目
2020年上海工程技术大学大学生创新校级项目cx2021004。