1. 引言
大气边界层内的物理化学反应与人类生活密切相关,研究大气边界层风场特征对于指导人类的生产生活十分重要 [1]。仅开展数值模拟和理论研究对边界层特性探索还不足 [2],需要结合边界层风场的观测数据进行研究 [3] [4] [5] [6]。常用于低空风场探测的仪器主要有:超声波风速仪、多普勒声波雷达、微波天气雷达和测风激光雷达,其中超声波风速仪是一种点测量仪器,很难用于探测风场的空间分布;多普勒声波雷达探测能力较弱且波束方向不可移动;微波天气雷达的观测对象主要是大颗粒的散射信号,在空气质量好的情况下,探测能力较差。相比于以上三种设备,测风激光雷达更适于大气边界层的风场探测且具有高时空分辨率的优点,是风场探测的重要设备之一。由于探测多普勒频移方式的不同,可以分为直接测风激光雷达和相干测风激光雷达,其中相干测风激光雷达对于气溶胶散射信号更灵敏,更适于低空风场探测,对于人类活动更有意义。
近年来,相干测风激光雷达被应用在机场低空风切变的监测 [7] [8] [9] [10]、风能资源利用的优化 [11]、台风的探测 [12]、大气湍流及三维风场的监测 [13] [14] 等领域。本文利用相干测风激光雷达的观测结果对北京地区春季的风场进行初步研究分析。
2. 探测原理
2.1. 多普勒效应
相干测风激光雷达发射的激光束在传播过程中被大气中的分子和气溶胶粒子散射,散射光相对于发射光产生的多普勒频移∆f与大气粒子的运动速度∆v关系如下:
(1)
通过鉴频手段获得由于大气粒子运动引起的多普勒频移∆f,进而可以根据公式(1)求出径向风速∆v。
2.2. 相干探测
风速引起的多普勒频移量∆f比激光频率f0要小得多。相干探测利用本振参考光信号与回波光信号混频,将不易探测的高频信号调制成携带多普勒频移量∆f的中频信号,更易于被探测。
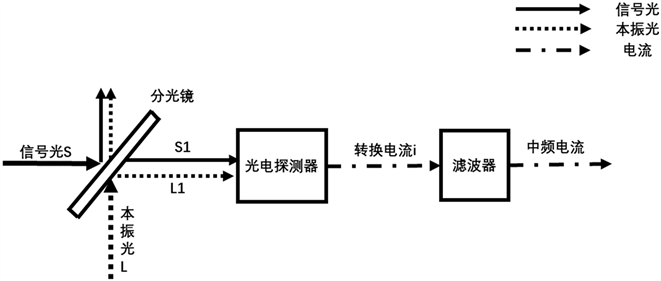
Figure 1. Principle diagram of coherent detection
图1. 相干探测原理图
激光相干探测的原理框图如图1所示,利用望远镜收集到大气气溶胶后向散射光信号S (频率为fs),并与本振参考光L (频率为fl)利用分光镜合束并耦合到光电探测器的光敏面上,使其发生干涉。光电探测器将干涉信号转化为电信号。由于光电探测器的响应带宽的限制,只有携带有两光波频率之差的中频信号(频率为∆f)能被探测到,其频率和相位是两个波束之间的频率和相位差。
由于带宽的限制,光电探测器的输出电流 通过电路的隔直处理,仅剩携带气溶胶后向散射光信号的振幅、频率和相位信息的交流项Ih,通过对Ih分析可以得出由于气溶胶运动引起的多普勒频移信息∆f。
2.3. VAD扫描技术
VAD扫描技术是目前地面应用最广泛的风场反演方式之一。VAD扫描技术(Velocity Azimuth Display)是指在天顶角固定的基础上通过改变不同的方位角实现对探测区域内不同方向径向风速的探测,进而反演获得三维风场的工作方式。以最简单的四波束为例,四个波束的天顶角α相同,方位角φ间隔均为90˚,以地物坐标系作为测量坐标系进行风场测量及反演。
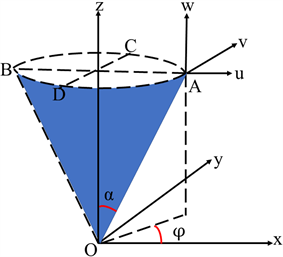
Figure 2. Schematic diagram of VAD scanning
图2. VAD扫描示意图
图2中,x轴和y轴分别指向地理正东和正北方向,z轴指向天顶。α和φ表示天顶角和扫描方位角。A、B、C、D四点在同一个高度面内,风场分布均匀且随海拔高度呈现层状分布。(u、v、w)分别表示A处的矢量风场。通过对A、B、C、D四个方向的径向风速的探测,可以反演出平面ABCD内的平均风场:
(2)
其中,VA、VB、VC、VD分别指的是A、B、C、D四个方向的径向风速值,vx、vy、vz分别指的是水平风场的x、y、z分量。
3. 装置介绍
实验中采用的相干测风激光雷达的主要光学硬件集中安置在带扫描伺服的球体内,电源、工控机和数据硬盘共同组成内机,如下图3所示。
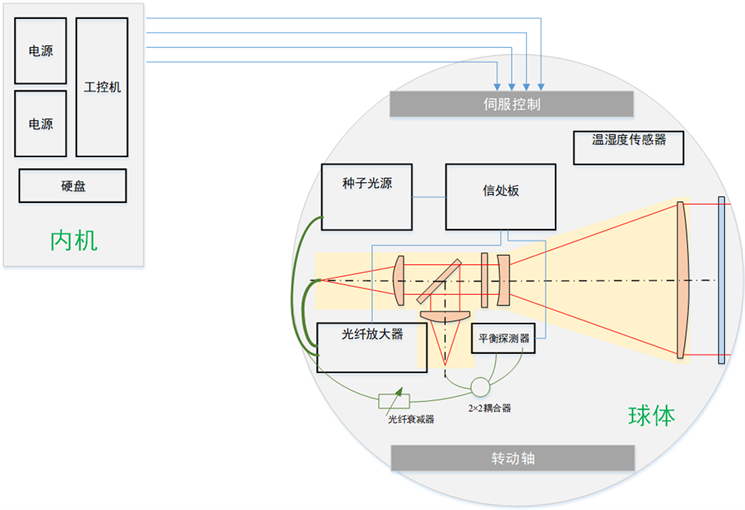
Figure 3. Block diagram of the laser wind measurement radar system
图3. 激光测风雷达系统结构框图
激光雷达光学器件中,种子激光器输出的激光经过保偏分束器将激光分为两束。一束经过AOM调制后,经过光纤放大器放大,再通过环形器由光学望远镜发射。大气中的气溶胶粒子后向散射的光子能量,经过光学望远镜耦合到环形器。种子激光器分出的另一束激光作为本振光与环形器接收的回波激光,经过2 × 2单模保偏耦合器进入平衡探测器进行混频,混频之后的信号经过低通滤波、放大之后进入信号处理板进行AD采样和运算,经过处理得到风场数据。扫描球体兼具温度监测与环境控制、密封、防护、供电、姿态转动、位置信息测量等功能。

Figure 4. Schematic diagram of outdoor detection
图4. 室外探测示意图
相干测风激光雷达于4月9日安装在北京市朝阳区办公楼顶(如图4所示),并持续开展数据采集,相干测风激光雷达主要参数如表1所示。

Table 1. Performance parameters of coherent wind lidar
表1. 相干测风激光雷达性能参数
4. 数据分析
相干测风激光雷达可以实现全天连续探测,设置天顶角为30˚,系统每隔5分钟形成一个包含水平风速、垂直风速等数据的文档。为了保证实时测量风速的准确性,选取偶数时刻的采样数据,将该时刻前后五次采集数据累加平均后的数据作为该时刻的风场数据。
4.1. 不同气象条件的风场数据分析
不同气象条件对相干测风激光雷达的探测性能有较大影响,为了分析激光雷达在不同气象条件下的探测性能,选取晴朗天气、阴雨天气、沙尘天气三种不同气象条件下的全天风速测量数据进行分析。
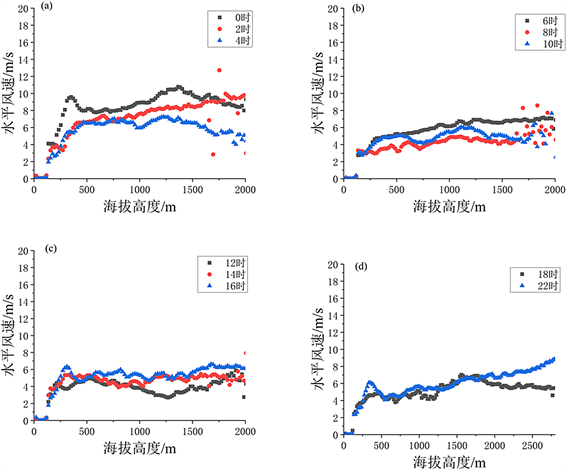
Figure 5. Horizontal wind speed at different times in sunny weather
图5. 晴朗天气时不同时刻的水平风速

Figure 6. Horizontal wind speed at different moments in rainy weather
图6. 阴雨天气时不同时刻的水平风速
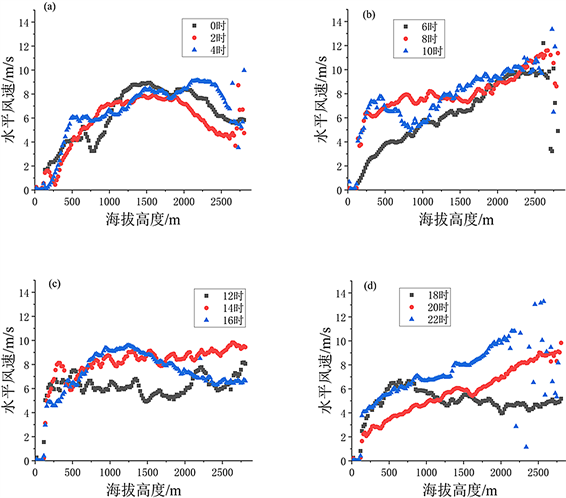
Figure 7. Horizontal wind speed at different moments in sand and dust weather
图7. 沙尘天气时不同时刻的水平风速
如图5~7所示,相干测风激光雷达在不同气象条件下的有效探测量程有明显区别。阴雨天气时,大气风场数据有效观测范围主要集中在海拔1000 m以内;沙尘天气时,大气风场有效观测数据范围可以覆盖海拔2500 m;晴朗天气时,大气风场有效观测数据范围则主要在海拔高度2000 m以内。相干测风激光雷达的探测性能与大气消光系数(降低回波功率)、后向散射系数(增强回波功率)的综合作用有关。沙尘天气时,空气中的气溶胶等粒子浓度升高,照射在其表面的激光束的后向散射系数变大,回波信号增强,因而可以得到较高海拔位置的风场数据;而阴雨天气时,大气消光系数较大,使得激光在传输过程中的损耗加剧,得到的回波信号较弱,较高海拔高度处的信号因信噪比不足导致无法获得有效数据。
4.2. 风场观测数据与天气预报的对比分析
将四月下旬相干测风激光雷达上午9点的观测数据与天气预报的风力作对比。
如图8所示,相干测风激光雷达的观测数据的主要趋势与天气预报风速范围有较好的吻合度,但部分日期的观测数据与天气预报也存在明显差异。分析原因,一方面测风激光雷达一定的不确定性,另一方面城市内风速和风向易受周边楼宇的影响。通过外定标实验和更长时间数据积累,可进一步研究分析风场特征。
4.3. 不同海拔高度风场数据分析
同一时刻、不同海拔高度的水平风速值也表现出明显差异。提取相干测风激光雷达在四月下旬上午9点的水平风速和垂直风速等数据如图9所示。
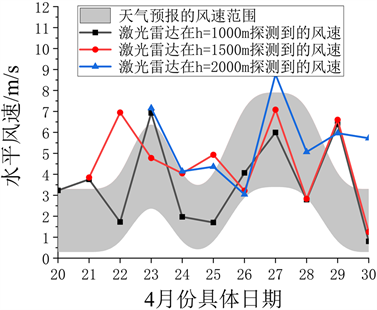
Figure 8. Comparison of coherent wind lidar observation data and weather forecast
图8. 相干测风激光雷达观测数据与天气预报的对比
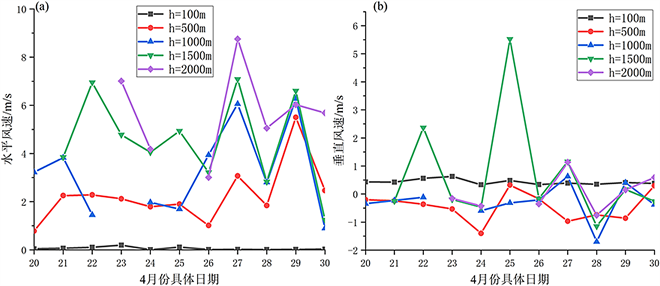
Figure 9. Wind field data at different altitudes obtained by coherent wind lidar in late April
图9. 四月下旬,相干测风激光雷达获取的不同海拔高度处的风场数据
从图9可以看出,近地表海拔h = 100 m的风速基本趋近于0 m/s;海拔高度较高的区域的水平风速波动比较大,海拔h = 2000 m的最大水平风速可以达到8.7 m/s。海拔0~2000 m范围内的垂直风速值较小,除了个别日期(4.22和4.25)外,基本分布在2 m/s以内(正负号表示垂直风速的方向)。此外,通过数据可以发现海拔高度500~2000 m范围内的三维风场以水平风为主,垂直风速很小。出现这个状况的主要原因是同一海拔高度处的不同区域冷热分布不均,引起的水平气压梯度力使得大气朝水平方向运动。而同一区域内的不同海拔位置的冷热相对比较均匀,导致大气垂直方向的运动比较缓慢,垂直风速小。
5. 结论
利用相干测风激光雷达对北京市朝阳区办公楼附近的风场进行持续观测,并对收集到的四月下旬风场数据进行了分析。经过分析可以发现,不同天气状况下相干测风激光雷达的探测量程不同,沙尘天气的探测范围较大,阴雨天气探测范围最小,晴朗天气探测距离居于两者之间。同一日期同一时刻不同海拔高度的风速也有差异,其中近地表风速较低,随着海拔高度升高,风速差异性增大,海拔2000 m的最大水平风速可达8.7 m/s;垂直风速较小,基本在0~2 m/s之间。经过二十余天的连续观测,对大气边界层内的风场特点有了初步的认识。后续将设置长期观测点,进一步对城市地区边界层的风场数据进行记录和分析,此外还将继续提升激光雷达的探测能力,实现更大范围风场数据探测,开展更深入的大气风场研究。