1. 引言
后坐力问题是许多武器或动力装置设计过程中重点关注的话题,它不仅影响武器装备的稳定性,而且控制不佳可能对操作者产生重大伤害。
基于后坐力防控需求,众多学者对其也进行了大量研究,其中Matthew J Hall [1],申彪等 [2] 分析了车载转管机枪枪身与架座之间采用的3种连接方式对后坐力、机匣前冲与后坐位移的影响,得出预压力双向缓冲器可有效降低并快速衰减后坐力;印圣等 [3] 提出了一种刚度可变并带有阻尼的新型弹簧双向缓冲装置,大大降低了某航炮的后坐力和冲击。磁铆接技术 [4] [5] [6] 属于高速冲击加载装配工艺,电磁铆枪作为加载执行器,具有较大的输出力,与此同时也产生较大的后坐力。电磁铆枪虽然可设计成较小的体积,便于操作灵活,用于野外操作及高空作业,但由于后坐力太大,对人或机械手具有较大的冲击,从而限制了电磁铆枪的广泛应用。
近些年来,电磁铆接设备也不断改进研发 [7] [8] [9],后坐力问题得到了有效的防控。曹增强等 [10] 建立了铆枪隔振系统力学模型,并提出了增加质量块、采用双层隔振系统代替原有单层隔振系统,采用新型减振橡胶并将次级线圈与电磁调制器连接为一体以减振降噪。王武坤 [11] 分析了手提式电磁铆枪的隔振特征,并建立了适合其要求的隔振系统,并用MATLAB分析了隔振系统各个参数对隔振效果的影响,优化了系统参数。陈琦等 [12] 从能量变化的角度提出了采用带缓冲器的新型减振系统,进行了小型电磁铆枪的结构设计,将铆枪结构分成驱动头、回弹系统和铆枪外壳三部分并制造出原型枪。王鹏鹏等 [13] 提出了一种对电磁铆接设备电源系统进行优化改进的方案,达到了增大铆接力的目的,同时提高了单次放电能量的利用率,并减小了后坐力。
本文为减小电磁铆枪对人或机械手的伤害,研究不可变刚度模型中橡胶垫以及阻尼器刚度对后坐力的影响规律,并提出一种串联阻尼器形成的可变刚度模型和进行阻尼器刚度对后坐力影响规律的研究,同时对此两种模型进行对比分析。通过研究分析,以来作出减小后座力的措施,避免电磁铆枪产生重大伤害。
2. 电磁铆接原理
2.1. 电磁铆枪加载原理
本文所用电磁铆枪结构如图1所示。铆接时,电磁储能设备对线圈放电并产生脉冲电流,该电流在线圈附近产生磁场,集肤效应使得驱动片(紫铜板)上产生感应电流,进而产生涡流磁场。在线圈磁场与涡流磁场斥力作用下驱动片推动放大器及冲头快速运动。驱动片所受斥力与线圈受力为作用力及反作用力,反作用了经过缓冲装置(法兰盘、阻尼器和支架)的传递,最终输出给人或机械手,也就是后坐力。电磁铆接过程持续时间短,通常在5毫秒以内完成加载,因此,短时高速冲击加载下后坐力防控不容有失。
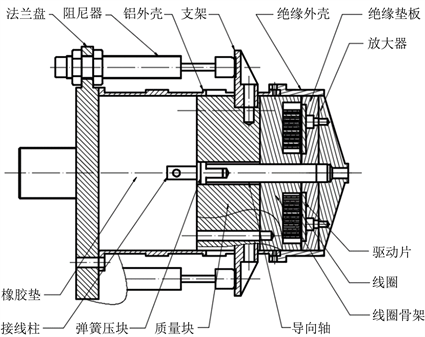
Figure 1. Electromagnetic riveting structure
图1. 电磁铆接结构
2.2. 缓冲机构原理
1) 不可变刚度模型
不可变刚度阻尼器结构如图2所示,其中阻尼器预压缩量为s。铆接时,线圈产生斥力,使得线圈骨架、支架和质量块相对于整体向左运动,即为缓冲后坐过程,同时电磁铆枪对铆钉输出一个同等大小的力。在缓冲后坐过程中,阻尼器和橡胶垫发生弹性形变,将动能转换为弹性势能;复进过程中,弹性势能转换为动能,同时对人产生后坐力,该力的大小为系统弹力变化值。另外,电磁铆枪质量m = 8 kg,后坐初速度v = 4 m/s,阻尼器预压缩量s = 5 mm,橡胶垫刚度k0 = 5 N/mm,阻尼器刚度k1 = 110 N/mm。
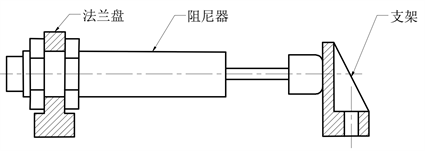
Figure 2. Immutable stiffness damper structure
图2. 不可变刚度阻尼器结构
2) 可变刚度模型
可变刚度阻尼器结构如图3所示,其中前置阻尼器预压缩量为s1,后置阻尼器预压缩量为s2。后置阻尼器设置了合适的较大预压力,且大于前置阻尼器的预压力。在电磁铆枪缓冲后坐过程中,线圈骨架和质量块带动支架向左运动,前置阻尼器不断压缩,当前置阻尼器所受压力大于后置阻尼器预压力时,后置阻尼器开始压缩,此时系统形成串联阻尼器,刚度变为串联阻尼器的可变刚度。其中,质量m = 8 kg,初速度v = 4 m/s,缓冲位移∆x = 19.5 mm,橡胶垫刚度k0 = 5 N/mm,前置阻尼器刚度k1 = 110 N/mm。
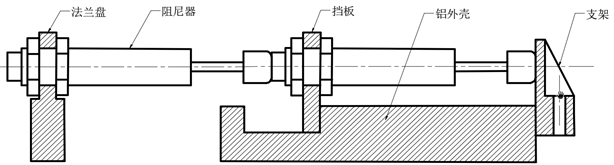
Figure 3. Variable stiffness damper structure
图3. 可变刚度阻尼器结构
3. 动力学模型建立
3.1. 作出假设
为了研究阻尼器刚度对后坐力的影响,并且只研究从后坐开始到速度为0的过程,不作复进过程的研究,为了方便计算与分析,作出以下假设:
1) 系统内的摩擦力忽略不计;
2) 物体间的碰撞损失的能量忽略不计;
3) 不考虑阻尼系数c的影响,取c = 0。
3.2. 不可变刚度模型
以橡胶垫的最右端为起始位置建立坐标系,坐标系正方向为向左运动方向。对于建立的系统,系统的微分方程为:
(1)
其中,m为质量块、线圈骨架和线圈的总质量;∆x为阻尼器的缓冲位移;k0为橡胶垫刚度;k1为阻尼器刚度;s为阻尼器的预压缩量。
3.3. 可变刚度模型
以橡胶垫的最右端为起始位置建立坐标系,坐标系正方向为向左运动方向。对于建立的系统,系统的微分方程为:
(2)
其中,m为质量块、线圈骨架和线圈的总质量;∆x为阻尼器的缓冲位移;k0为橡胶垫刚度;k1为前置阻尼器刚度;k2为后置阻尼器刚度;d为前置阻尼器的工作行程;s为阻尼器的预压缩量。
4. 数值计算及分析
4.1. 不可变刚度模型
系统开始时的动能经过一个缓冲后坐过程后,转化为两个阻尼器以及橡胶垫的弹性势能。即有能量守恒关系式:
(3)
m、v、s已知,m = 8 kg,v = 4 m/s,s = 5 mm,确定k0,k1,通过式(1)、(3)即可求得∆x,Fm。
1) 固定k0改变k1
表1和图4表明随着k1的增大,后坐力会不断增大,并且呈线性关系增长,而缓冲位移是减小的。阻尼器刚度k1的增大,由于能量守恒导致缓冲位移∆x的减小,但是k1的变化量大于∆x的变化量,因此阻尼器中的弹力依然会增大,在电磁铆枪缓冲复进过程中由于力的相互作用,弹力转成后坐力,复进开始时的后坐力即最大后坐力,所以最大后坐力是随着k1增大而增大。如果k1过小,会导致缓冲位移过大,会大大增加电铆枪外壳质量,因此在承载范围内,适当减小k1。所以k1取值定为:110 N/mm。

Table 1. The effect of k1 on recoil forces and buffering displacement
表1. k1对后坐力及缓冲位移影响
2) 固定k1改变k0
表2和图5表明随着k0的增大,缓冲位移没有明显变化,但后坐力是不断增大的。橡胶垫刚度k0的增大,由于橡胶垫刚度的取值变化不明显,导致缓冲位移∆x几乎不变,而橡胶垫的弹力跟橡胶垫刚度是成正相关关系,因此弹力增大。在电磁铆枪缓冲复进过程中由于力的相互作用,橡胶垫的弹力会转成后坐力,复进开始时的后坐力即为最大后坐力,因此k0的增大会导致最大后坐力的增大。而如果k0过小,橡胶垫相当于一个刚体,那么就没有任何研究的意义。所以k0取值定为:5 N/mm。
Table 2. The effect of k0 on recoil forces and buffering displacement
表2. k0对后坐力及缓冲位移影响
4.2. 可变刚度模型
当后坐力达到后置阻尼器的压力时,则有:
(4)
求解可得:
(5)
两阻尼器串联共同作用时,前置阻尼器与后置阻尼器的弹力相等,有:
(6)
可得:
(7)
电铆枪后坐时的动能转化为阻尼器以及阻尼器垫的弹性势能,经过一个缓冲后坐过程后,由于电铆枪两边的结构都设有阻尼器,根据能量守恒定律有:
(8)
其中系统总能量
;仅前置阻尼器工作的阻尼器获得的弹性势能为:
;两阻尼器串联工作的阻尼器获得的弹性势能为:
;后置阻尼器工作的阻尼器获得的弹性势能为:
;以及橡胶垫获得的总弹性势能为:
。结合公式(5)和(8),得:
(9)
其中
,
,
;
或得:
(10)
其中
,
。
已知k0、k1、k2、∆x、m、v,则s1、s2二者之间确定一个变量的值,通过式(9)或(10)可以将另一个变量的值即可求出。
质量m = 8 kg,初速度v = 4 m/s,缓冲位移∆x = 19.5 mm,橡胶垫刚度k0 = 5 N/mm。为了方便进行后面的对比分析,由于后置阻尼器预压力大于前置阻尼器预压力,故前置阻尼器刚度k1 = 110 N/mm,设定后置阻尼器刚度k2 = 220 N/mm。为了与不可变刚度模型进行对比分析,那么s1和s2之间,必须有一个值为5 mm。
1) 已知前置阻尼器预压缩量s1为5 mm,求s2。
通过数值计算,得s2 = 12.2 mm,d = 19.5mm。d的值几乎接近∆x的值,相当于后置阻尼器几乎没有起作用,那么就没有必要作进一步的研究了。
2) 已知后置阻尼器预压缩量s2为5 mm,求s1。
通过数值计算,得s1 = 7.4 mm,d = 2.6 mm。可继续进行研究。
因此m = 8 kg,v = 4 m/s,s2 = 5 mm,∆x = 19.5 mm,k0 = 5 N/mm,k1 = 110 N/mm。确定k2,通过式(2)、(9),即可求得d,s1,Fm。
表3和图6表明随着k2的增大,前置阻尼器工作行程和最大后坐力不断增大的,而前置阻尼器预压缩量相反。k2增大的由于能量守恒会导致s1的减小,由于前置阻尼器经过一个工作行程后的压力须达到后置阻尼器的预压力,因此d是增大的,同时后座力中后置阻尼器占主导作用,因此最大后坐力也是增大的。如果k2过小,会导致前置阻尼器工作行程太小,此时前置阻尼器几乎不起作用;而k2过大的话,会造成后坐力太大。所以k2定值为:220 N/mm。
Table 3. The effect of k2 on recoil forces and buffering displacement
表3. k2对后坐力及缓冲位移影响
4.3. 对比分析
将不可变刚度模型和可变刚度模型对比,在缓冲位移相同的情况下,结合前面内容,可确定各参数的值,分别代入式(1)和式(2)得到函数式。通过Python编程来模拟函数的图象,以及通过MATLAB对函数极限值进行求解,得到图7、图8和表4。
由表4和图7、图8可见:
1) 在缓冲位移小于10 mm时,可变刚度模型的后坐力大于不可变刚度模型,而在大于10 mm时,结果则相反。
2) 在缓冲位移不变的情况下,不可变刚度模型最大后坐力为5478.1N,可变刚度模型最大后坐力为4776.9N,降低了12.8%。
3) 可变刚度模型的缓冲时间比不可变刚度模型多22.9 ms,增加了4.9%。
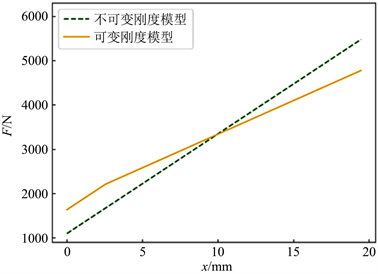
Figure 7. The F-x relationship curve of two models
图7. 两种模型的F-x关系曲线
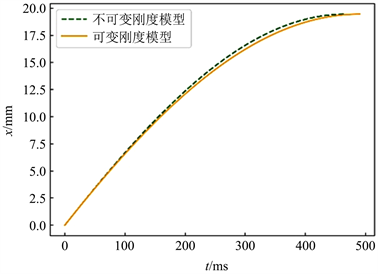
Figure 8. The x-t relationship curve of two models
图8. 两种模型的x-t关系曲线图
可变刚度模型的刚度数值大小在缓冲位移刚好为d时发生改变,此时系统刚度不再是前置阻尼器刚度,而是串联阻尼器刚度;由于前置阻尼器的弹力达到了后置阻尼器的预压力,两阻尼器形成串联,总阻尼器刚度会变小,因此在缓冲位移相同的情况下,可变刚度模型最大后坐力较不可变刚度模型要小很多。同时,后坐力的减小会导致缓冲加速度减小,在整个缓冲后坐过程中缓冲位移无发生变化,因此可变刚度模型的阻尼器工作时间比不可变刚度模型要长。可见,可变刚度模型更具有缓冲减震的优越性。
5. 结论
本文分析了不可变刚度模型中橡胶垫刚度k0和阻尼器刚度k1的变化对电磁铆枪后坐力的影响,在提出了阻尼器串联形成的一种刚度可变模型的基础上,分析了后置阻尼器刚度k2对后坐力的影响,并将两种模型进行了对比,研究了对后坐力和缓冲时间的影响。
1) 不可变刚度模型中减小橡胶垫刚度k0,以及减小阻尼器刚度k1,可起到减小后坐力的作用。
2) 可变刚度模型中减小后置阻尼器刚度k2,可显著降低后坐力。
3) 不可变刚度模型中减小阻尼器刚度k1,会导致缓冲位移∆x的增大;可变刚度模型中减小后置阻尼器刚度k2,会造成前置阻尼器几乎不起作用。因此都需在允许范围内适当减小。
4) 在缓冲位移不变的条件下,可变刚度模型相比不可变刚度模型,后坐力减少了12.8%,缓冲时间增加了4.9%,增强了缓冲效果。
基金项目
湖南省自然科学基金资助项目(2019JJ50662)和湖南省教育厅一般项目(18C0208)。
参考文献