1. 引言
煤炭是世界上储量最多、分布最广的常规能源,也是最廉价的能源,其广泛应用于钢铁、电力、化工等工业生产及居民生活领域,我国也是一个煤炭产销大国,并且存在大量的小型煤矿,多数煤矿地质条件复杂,采矿条件恶劣,如开采深度大、高瓦斯矿多、易自燃煤层多等 [1]。由于产煤量大,井下从业人员比例大,自动化程度低,这就难免导致矿难事故的多发,因此搜救工作至关重要。但由于事故发生后井下环境存在不确定和危险因素,造成救援难度大且效率低,救援人员盲目下井救援可能发生二次灾难,如瓦斯爆炸,受高温、烟雾、有毒有害气体以及缺氧等的影响 [2]。如何在第一时间获得环境信息,为救援指挥人员提供决策依据变得异常重要,直接关系到井下受困人员的生命安全和救援人员的应急救援方案的制订 [3]。那么能研究一种便携式的救援设备就很大程度减少上述问题的隐患,大大提高救援效率,同时在一定程度上也能够保证救援人员的安全问题。对于便携式救援设备的研究以及使用也是应用于救援的一个重要的技术手段。
2. 井下救援机器人研究现状
据资料显示在20世纪80年代,救援机器人在国外才开始起步,而该类型机器人的第一次实际运用于救灾行动是在2001年911事件发生后,美国机器人辅助救援中心(CRASAR)和其他一些单位的救援机器人参加了救援行动。之后,许多国家才开始努力研制各种类型用于救援、防爆和火灾等机器人用于灾难的防护,其中井下救援机器人就成为了一个重要分支也得到了重视。
井下救援机器人按移动机构的不同主要可分为履带式救援机器人、轮式救援机器人、足/ 腿式救援机器人、复合式救援机器人、仿生救援机器人等5种类型。
2.1. 履带式救援机器人
履带式机器人具有良好的机动性能,当面对复杂的巷道环境时,利用其履带运动装置可以比较平稳的穿过,同时也能在狭窄的环境下实现转向、掉头等运动,较好通过各种类复杂的地形,能快速性、准确性的完成救援的目的。例如图1为鞍山凯信公司与中科院沈阳自动化研究所共同研制的煤矿井下探测机器人,在它的前后有两个红外线摄像头,可以把井下影像传到地面。图2为中国矿业大学可靠性与救灾机器人研究所的国内首台煤矿搜救机器人CUMT-I。采用自主避障和遥控引导相结合的行走控制方式,装备有低照度摄像机、气体传感器和温度计等设备,具有无线网络通讯功能 [4]。
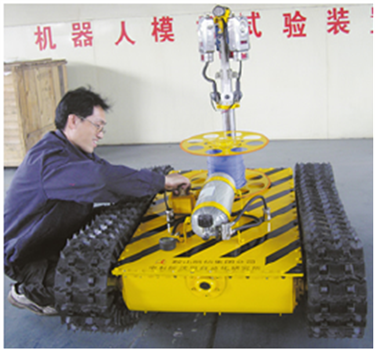
Figure 1. For Anshan Kaixin company and Shenyang Research Institute of Chinese Academy of Sciences jointly develop tracked rescue robot
图1. 鞍山凯信公司与中科院沈阳研究所共同研制履带式救援机器人实物

Figure 2. It is the first tracked coal mine search and rescue robot developed for the Research Institute of China University of mining and technology
图2. 中国矿业大学研究所研制的国内首台履带式煤矿搜救机器人
2.2. 轮式救援机器人
用于井下应用的机器人需具备高机动性、强大的环境感知能力和快速的反应能力 [5],其中就陈海龙、郭鹏等人的六轮移动机器人采用独立悬挂系统,减少了车身受到的冲击,并提高了车轮的地面附着力;降低了机器人的重心,从而提高了行驶稳定性;左右车轮单独跳动,互不相干,减小了车身的倾斜和震动 [6]。图3为其轮式救援机器人样机模型。燕山大学的Rolling-Wolf机器人如图4腿部采用三自由度串并混联结构具有较高的灵活性和抗冲击性,其对腿部结构进行了多目标优化提高了机器人的运动性能和力学性能 [7]。除此之外,美国智能系统和机器人中心的RATLER矿井探索机器人,该机器人由四轮,左右分体式车身组成。虽然其原型设计是满足野外全地形运动的车辆,但是因为没有按照矿井环境来进行设计运动系统,造成设计的底盘较低,越障性能一般,再加上转向不灵活,不太适合于巷道等狭窄空间,且没有任何自主避障方面的设计。
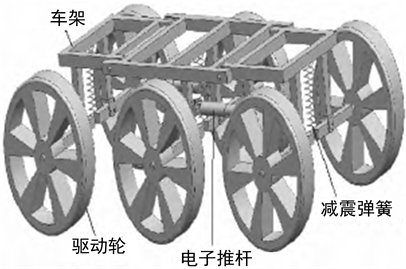
Figure 3. A wheeled rescue robot model with independent suspension system is designed for Chen Hailong and others
图3. 陈海龙等人设计的采用独立悬挂系统的轮式救援机器人模型
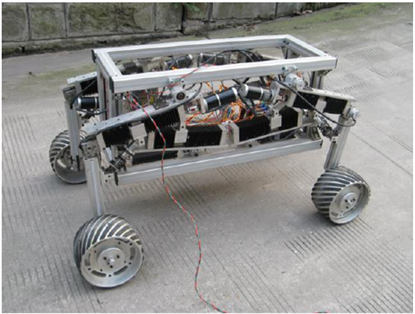
Figure 4. Research and design of wheeled rescue robot for Yanshan University
图4. 燕山大学研究设计的轮式救援机器人实物
2.3. 足/腿式救援机器人
足/腿式救援机器人最大的优点为:灵活的运动机构,可以实现台阶、上下坡、崎岖路面等较为复杂的场所,其次虽然腿足式机器人移动效率低、负载稳定性差但是越障性能优秀 [8],但管贵森在将足式机器人改进安装四个驱动轮,通过机器人的翻转动作实现腿足和轮式的切换 [9]。徐坤等设计了六轮腿式机器人如图5,机器人采用正六边形对称式设计,控制器等位于机体中心,通过改变机器人的机构姿态实现轮腿模式切换,具有较高的地面适应性和机动性 [10];日本千叶工业大学的未来机器人技术研究中心(fuRo)研制的Halluc-Iix如图6具有八条轮腿,通过56个电机驱动,采用仿人机器人技术与汽车技术具有极高的机动性,可以切换车辆、昆虫和动物三种形态 [11]。另外,在日本东京工业大学研制了的一款腿式救援机器人,是一种可“变形”的机械腿,由机械臂加轮子组成,能够在需要的时候变成轮子,让机器人依靠滑轮向前移动。

Figure 5. A six wheeled legged robot was designed for Xu Kun and others
图5. 徐坤等设计了六轮腿式机器人

Figure 6. The wheel legged robot is developed for the future robotics research center of Chiba University of technology in Japan
图6.日本千叶工业大学的未来机器人技术研究中心研制的轮腿式机器人
2.4. 复合式救援机器人
复合式救援机器人中轮腿式的结构由于其兼具机动性和灵活性而受到国内外学者的研究 [12]。其中,美国的i Robot公司生产的Packbot系列机器人,就是一款复合救援机器人,它由两条主履带和两条摆臂履带组成的履带复合式救援机器人。在所有履带共同协助下不仅能爬楼梯还能攀越45˚的斜坡等,曾用于伊拉克战场。此外孙治博等人设计了主动摆臂六轮腿机器人,通过两个独立的摆臂轮腿运动单元配合四个复合摆臂轮腿单元的结构使机器人在崎岖路面越障中保持较高的平稳性,使用最小二乘法拟合推杆的速度并通过实验验证了模型的正确性及结构的合理性 [13];田海波等人研究了多驱动模式复合移动机构的轮腿机器人,建立了该模型下最大越障高度与输出力矩关系,为改善其移动性能提供了理论依据 [14];苗智英提出3-PUU并联轮腿机器人使用全向轮移动,具有一定的越障能力 [15],目前也出现了众多结构迥异的轮腿式机器人。日本横滨国立大学的藤本实验室研究的即为典型的轮足机器人如图7。

Figure 7. A wheel legged hybrid robot is developed for Fujimoto Laboratory of Yokohama National University in Japan
图7. 日本横滨国立大学的藤本实验室研究的轮足式复合机器人
2.5. 仿生式救援机器人
不同于传统轮胎和履带移动方式的机器人,仿生的步行机器人在较复杂环境中的行走具有独特的优越性 [16]。其中就西北民族大学电气工程学院的薛乐乐设计了一种六足机器人利用仿蜘蛛移动的优越性和特点则可以解决机器人在更困难的工作环境中的行走问题。在仿生机器人中,仿蛇形的研究比较有深度和广度,如西安科技大学的白云对煤矿蛇形探测机器人位姿控制方法研究、煤矿救援蛇形机器人环境建模方法的研究以及哈尔滨工程大学赵华鹤的类蛇形多关节搜救救援机器人研究使其更加准确表达度量信息又能体现位置关系信息的地图模型如图8,是煤矿救援蛇形机器人在复杂煤矿环境中进行路径规划、完成救援任务的基础,有着重要的现实意义。
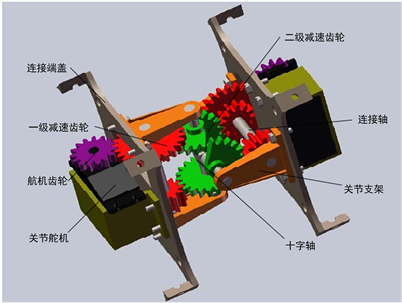
Figure 8. Three dimensional joint driven model of snake rescue robot researched and designed by Zhao Huahe
图8. 赵华鹤研究设计的蛇形救援机器人的关节驱动三维模型图
3. 井下救援机器人关键技术
井下救援机器人在井下救援工作时常常会遇到诸多问题,如在潮湿、阴暗的井下环境中,救援机器人很容易发生导航功能失效、越障能力不足、续航力不足等。当前市场上的井下救援机器人主要应用于井下探测深度和搜索被困人员,而专注于“救人”工作的井下救援机器人较少。所以,为使井下救援机器人能高效地完成救援工作,保障人民群众的生命财产安全,井下救援机器人应具备较强的避障能力、较高的机构可靠性、较长的续航能力以及稳定高效的通信能力等关键技术。
3.1. 移动系统
移动系统作为井下救援机器人的移动载体,决定了其自主越障的能力。按移动方式的不同可将井下救援机器人分为履带式救援机器人、轮式救援机器人、腿式救援机器人、复合式救援机器人以及仿生搜救机器人等,不同机器人移动系统的性能对比见下表1。随着科技的发展,井下救援机器人各方面性能将会不断提高,未来的移动系统发展对环境的适应范围更广,移动系统的改进将会趋于复合式、仿生式发展。

Table 1. Performance comparison of different mobile systems of rescue robot
表1. 救援机器人不同移动系统性能对比分析
3.2. 通信与感知系统
井下救援机器人的通信系统主要负责实现信息的双向交流。线控式可以使用光缆或者电缆,抗干扰能力强,可靠性高,但容易被障碍物缠住;无线遥控式操作方便,活动范围大,但控制信号易受干扰。因此,可以采用有线与无线结合的方式进行控制,保证信号传输的高效稳定性。感知系统主要是针对井下救援机器人中灵敏度高、可靠性好的传感器,在保证对机器人正常控制的同时,使其能够迅速探测井下环境,传输数据信息,并通过搭载的生命探测仪探索井下生命迹象,从而实现对人员的定位 [17]。
3.3. 安全保护系统
为保证井下救援机器人能够在井下安全运行,救援机器人应具安全保护功能,避免二次灾害事故的发生。如因外力作用造成隔爆结构失爆时,安全保护系统能够自动停止能源供应;对使用隔爆结构的组件也应有失爆保护,不产生火花;动力系统应有自锁保护,能及时停止运作并自锁;传输信号应满足本质安全要求;非金属材料必须满足抗静电要求等 [18]。
3.4. 能源供给系统
由于井下工作环境比较恶劣,且越障过程中耗能较大,为保证机器人能够长时间的正常工作,必须有较长续航能力的能源供给系统。能量供给系统主要为井下机器人提供动力,有流体动能发电、电缆和液压等3种能量供给方式。目前,井下救援机器人主要采用电缆能量供给方式,由于电缆需占用机器人的设计空间,且牵引力较小,因此对于井下救援机器人来说,不宜采用电缆能量供给方式,采用液压能量供给方式比较可取,因为液压能量供给系统不会占用有限的设计空间,牵引力达到65.77kN,且移动距离较长,能使井下机器人牵引更长的管柱 [18]。
3.5. 远程监控系统
在井下救援过程中,指挥员通过井下救援机器人传递的井下环境信息,通过控制井下救援机器人进行各种传感器采集信息与控制指令的输入,最后输出为图像。图像传输为井下救援机器人远程监控系统中最重要的部分,现场信息主要以图像的形式实时传输给指挥人员,使得指挥人员能实时地感受现场环境,并根据图像信息作出正确指令,提高救援效率 [19]。
4. 存在的问题
本文围绕井下便携式救援机器人展开论述,简述了该类型机器人的运动分析、样机分析以及研究现状分析等主要过程,在本文的论述中井下便携式救援机器人主要存在有以下几点问题:
1) 现有井下救援设备大多数的研究重点主要放在了动力输送、移动机构以及位置定位等,而缺少了对于快速救援这一功能的重点研究。
2) 现有井下救援设备缺少从用户的生活环境、危险场景、以及获取是否便捷等方面考虑的人性化设计。
3) 最后现有井下救援设备存在操作上比较复杂、移动比较笨重、体积较大不易收纳和携带、获取不及时性等的问题,从而使救援速度减慢,救援成功率大大降低,以及可能存在会增加二次伤害等风险。
5. 展望
当今社会科技飞速发展,我们所研究的便携式救援设备也必须紧跟科技的进步而得到进一步发展。目前我国在智能应急救援设备产业方面的研发具备一定的基础,基本掌握了一定的智能救援装备的设计制造、控制系统软硬件、运动规划等相关技术,但仍然存在一些问题。所以,未来我们的便携式救援设备应从以下三个方面研究和改进。
5.1. 实现多功能化、智能化、便携化
在一些危险,复杂的环境中,救援设备必须要具有很高的精确度以及高的效率,多一分钟停留就多一分钟的危险,如在进行救援的时候,我们的救援设备如何能够及时找寻到最近的路径以及如何定位到需要被救援的人,并且要保证在进行施救的同时要保证周围环境的绝对安全,以免给受伤人员带来二次伤害甚至生命危险,这就需要我们的救援设备具有高度的多功能化、智能化。为了加快救援设备的移动速度,增加救援成功率则需要我们的救援设备更加便携,以便快速、准确的到达目的地。
5.2. 建立完善的救援设备运用与开发体系
目前,美国、日本、俄罗斯等国家已形成了通用、专用、大型、小型等应急救援装备的合理运用与开发体系。使其根据灾情大小、灾区距离合理搭配救援设备,从而有效地保障了应急救援装备的运用,这一体系随着科技的发展而不断完善。所以不单单是我们的井下救援机器人以及其他类型的救援设备在未来的研究与运用中也应该具备一套完善的救援体系。
5.3. 建立应急救援设备智能调配系统
在这个计算机信息技术、大数据技术空前发达的时代,不妨将其加以开发与运用,使其与救援设备合理关联以便使我们的救援设备实现与军警民三联动、就近调配的应急救援体系,从而很大程度上增强救援的成功率。因此实现救援设备的智能调配系统是必须的。这样不仅能够实现救援的快速性、可靠性、准确性,更在一定程度上也大大降低了救援人员与被救援人员的安全隐患,增强了救援的成功率等。
基金项目
高层次人才启动项目(XJGC20190927);贵州省科技计划项目(黔科合基础[2019] 1152号);省级大学生创新创业训练计划项目(S202014440121)。