1. 引言
近年来,人类探索宇宙空间的能力在我国航空航天技术的快速发展下取得了一定程度下的提高,鉴于遥感卫星能够拍摄高分辨率的地球遥感图像,结果,越来越多的通信卫星被送入环绕地球的轨道。高像素遥感图像的语义分割的日常任务是指为遥感图像的每个定义分配语义标记 [1],简单来说,遥感图像用于对高线图像进行语义分割,例如山脉,森林,道路,大城市和海域,常规图像分割无法识别建筑物,道路,河流和其他商品,而语义分割则可以做到。遥感图像的语义分割已广泛应用于城市规划建设 [2] 和土地资源覆盖 [3] 等行业。
最早是J. Shotton提出图像的语义分割 [4],定义了一个条件随机场,分类器选用提升决策树,来完成语义分割。Ren X等明确提出了简单的线性迭代聚类 [5],即超像素分割SLIC (Simple Linear Iterative Clustering)优化算法,若超像素的分割不稳定,分类很可能会发生错误,Xiao J等人提出了针对街景图像的多视图语义分割框架 [2],这种方法可以用于街景语义理解的许多日常任务。
深度神经网络的语义分割是利用神经网络自动获取图像中每个像素的含义,紧接着对像素进行分类和识别,可以合理地节省人力。众所周知,遥感影像的情况相对来说更为复杂,不同类型的物体(例如河流,道路)通常在中间具有高度相似的外观,有时物体会被遮挡,在采集图像和传输图像的过程中也会有各种噪声的存在,噪声在图像里面被认为是无效的信息内容,因此输入图像也会对分割结果造成损害。此文在U-Net网络模型的基础上,采用了一种基于DCNN与CRF的算法,弥补图像在传输和获取过程中存在的噪声问题。
2. 语义分割的网络结构
语义分割的准确率往往不高,原因在于在高分辨率遥感图像中进行分割任务时,在空间分布上的类别数据易混淆且相邻交错分布,除此之外,一般的网络模型很难进行有效的特征表示,本文为了改善易混淆数据类别分割准确率低的问题,该设计方案的网络模型基于DeepLab V3结构进行了改进。Internet的主要结构如图1所示。
2.1. DeepLab V3+算法
DeepLab V3+是DeepLab V3优化算法的改进。以DeepLab V3+作为编码结构可以很好地管理分段结果。根据简单合理的编解码器模块的改进,基础Internet选择了改进的Xception和mobilenet模块。DeepLab V1,DeepLab V2 [6] [7] [8] 应用了空心卷积,并明确提出在空间维度上完成金字塔的空洞池化(Atrous SpatialPyramidPooling, ASPP)。DeepLab V3+改进了空间维度上的ASPP,该模块级联了多个空洞卷积结构,见图2。
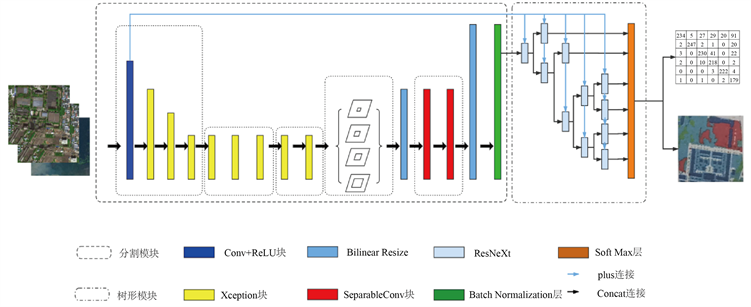
Figure 1. The overall schematic diagram of the network model
图1. 网络模型的整体示意图
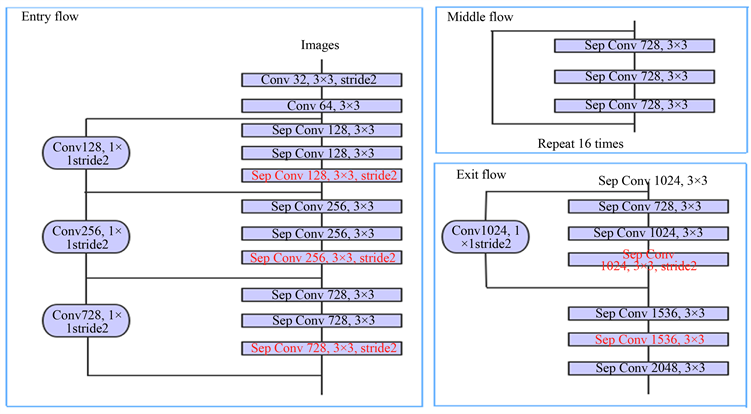
Figure 2. Improved Xception network
图2. 改进的Xception网络
DeepLab V3+的网络模型主要由两部分组成:编码器部分和解码器部分。解码器由双层SeparableConv块组成,其中几个Xception块包含残差。
2.2. DeepLab V3+的Keras实现
DeeplabV3+被认为是语义分割的新高峰,主要是因为这个模型的效果非常的好,DeepLabv3+主要在模型的架构上进行优化改进,为了融合多尺度信息,其引入了语义分割常用的encoder-decoder形式,在 encoder-decoder 体系结构中,根据空洞卷积平衡精度和耗时,介绍了可以任意控制编码器提取特征的分辨率,DeeplabV3的关键构造见图3。
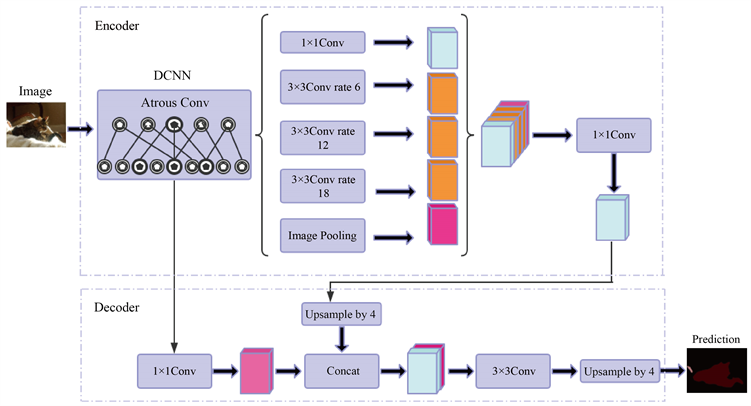
Figure 3. The main structure of DeepLab V3+
图3. DeepLab V3+主要结构图
其实,从Deeplab V3+的网络可以看出,这个网络简单优美,没有那么多复杂的组合等等,四个空洞卷积块则是最为核心的内容,其中卷积核分别是1、6、12、18。由这幅图我们可以发现,其实deeplabV3+模型仍然是两个部分,一个部分是Encoder,一个部分是Decoder。空洞就是特征点提取的时候会跨像素,空洞卷积的目的其实也就是提取更有效的特征,所以它位于Encoder网络中用于特征提取。
编码器Encoder有两个核心点:1) 串行通信的Atrous卷积应用于骨干DCNN深度卷积神经网络。串行的意思就是一层又一层,普通的深度卷积神经网络的结构就是串行结构;2) 在图片经过主干DCNN深度卷积神经网络之后的结果分为两部分,一部分直接传入Decoder,另一部分经过并行的Atrous Convolution,分别用不同rate的Atrous Convolution进行特征提取,再进行合并,再进行1 × 1卷积压缩特征。
Decoder看起来就简单多了,其输入有两部分,一部分是DCNN的输出,一部分是DCNN输出经过并行空洞卷积后的结果。这两个结果经过一定的处理后Concat在一起,在DeeplabV3中,Upsample的方式是双线性插值。
3. U-Net模型
U-Net能被划分为三个部分:第一部分是主干特征提取部分,我们可以利用主干部分获得一个又一个的特征层,U-Net的主干特征提取部分与VGG(Visual Geometry Group)相似,为卷积和最大池化的堆叠。利用主干特征提取部分我们可以获得五个初步有效特征层,在第二步中,我们会利用这五个有效特征层可以进行特征融合;第二部分是加强特征提取部分,我们可以利用主干部分获取到的五个初步有效特征层进行上采样,并且进行特征融合,获得一个最终的,融合了所有特征的有效特征层;第三部分是预测部分,我们会利用最终获得的最后一个有效特征层对每一个特征点进行分类筛选,它的原理见图4。
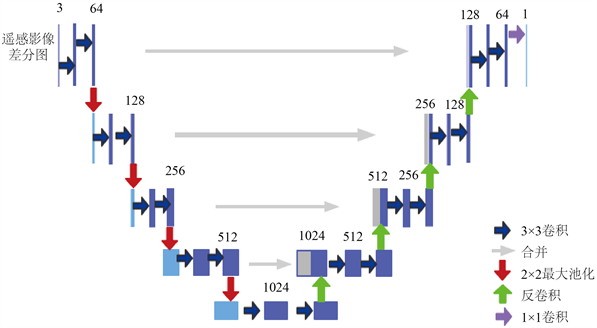
Figure 4. U-Net network model diagram
图4. U-Net网络模型图
根据这个模型的形状能观察到它结构上的优美组合,我们可以在这个基础上可进行大量的改进,比如说,特征提取块能够使用残差网络(resnet)进行替换,除了避免梯度消失外,它还可以学习和训练更多的特征,有利于提高精度。在特征融合层,大家普遍采用两种方式,第一种直接相加,即将编码层与解码层的特征直接相加,另外一种就是常用的concat,关于这两种有什么优缺点,本文认为concat可以融合更多特征,其实就是以前的向量相加(vector stacking)。
4. 条件随机场(Conditional Random Field, CRF)
传统的图像分析中,CRF主要用来做平滑处理,又因为short-range CRFs可能会对我们恢复局部信息的目标起到反作用,所以使用全连接CRF,考虑全局信息。全连接条件随机场的能量函数如公式(1)所示:
(1)
这个能量函数计算的是所有像素点的量和能量,其中后半部分pairwise部分显示,特征数量是
[n指像素个数],所以全连接条件随机场也被称为Dense CRF。能量函数的前半部分是一个一元函数,如公式(2)所示:
(2)
还要注意的是,观测点是你要标注的这些词本身和它们对应的特征,例如说词性是不是专有名词、语义角色是不是主语之类的。隐节点,是这些词的标签,比如说是不是人名结尾,是不是地名的开头这样。这些隐节点(就是这些标签),依次排开,相邻的节点中间有条边,跨节点没有边(线性链、二阶)。然后所有观测节点(特征)同时作用于所有这些隐节点(标签)。至于观测节点之间有没有依赖关系,这些已经不再重要了,因为它们已经被观测到了,是固定的。线性链的条件随机场跟线性链的隐马尔科夫模型一样,一般推断用的都是维特比算法,该算法是一个简单的动态规划。
首先我们推断的目标是给定一个X,找到使P(Y|X)最大的那个Y,然后这个Z(X),一个X就对应一个Z,所以X固定的话这个项是常量,优化跟他没关系(Y的取值不影响Z)。然后exp也是单调递增的,也不带它,直接优化exp里面。所以最后优化目标就变成了里面那个线性和的形式,就是对每个位置的每个特征加权求和。比如说两个状态的话,匹配的概率是逐渐过渡到第一状态的概率加上从第一状态过渡到第二状态的概率,这里概率是只exp里面的加权和。那么这种关系下就可以用维特比了,首先算出第一个状态取每个标签的概率,然后再计算到第二个状态取每个标签得概率的最大值,这个最大值是指从哪个状态标签转移到这个标签的概率最大,值是多少,并且记住这个转移(也就是上一个标签)。然后再计算第三个取哪个标签概率最大,取最大的话上一个标签应该是哪个。以此类推。整条链计算完之后,就知道最后一个词去哪个标签最可能,以及去这个标签的话上一个状态的标签是什么、取上一个标签之前状态的标签又是什么。这里说的概率都是exp里面的加权和,因为两个概率相乘其实就对应着两个加权和相加,其它部分都没有变。
5. 实验方法
5.1. 基于卷积神经网络的算法
要有效地对图像进行语义分割重点要先解决两个部分,首先要训练网络模型,我们要先确定欲分割图像的类型,然后选择大量与欲分割图像类型一致的图像作为数据集,与此同时制作相应的标签图,这样就能够进行网络模拟的训练,紧接着是对输入的图像进行预处理,在得到分割结果之前,将处理好的图像输入训练后的网络模型中即可。在语义分割任务中被广泛采取的基本是深度学习方法 [9] [10]。2017 年Shelhamer等人 [11] 建立了一种可以接受任意大小图像的全卷积神经网络(Fully Convolutional Networks,FCN),诠释了FCN在空间密集型预测任务上的应用并且给出了他与之前其他网络之间的联系,在图像语义分割领域具有重要的意义。图像分割的整体流程如图5所示。
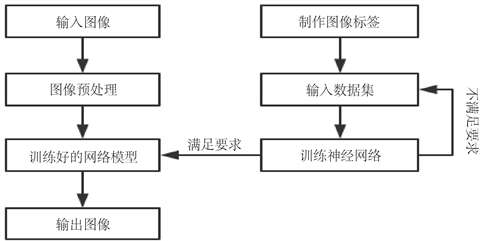
Figure 5. Flow chart of overall segmentation
图5. 整体分割流程图
5.2. K-均值聚类法
由于K-均值聚类法也被称为K-means算法,K-means是一群无标记数据间的因为自我相似的聚拢,所谓物以类聚人以群分,相似的人们总是相互吸引在一起,数据也是一样,而K-means的目标为簇内密集而簇间稀疏。其原理如图6所示。
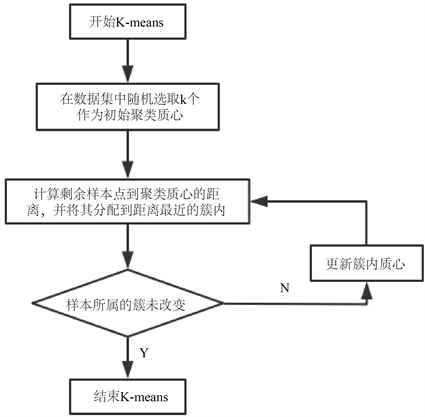
Figure 6. K-means algorithm flow chart
图6. K-均值算法流程图
K-均值优化算法简单,快速且高效。当数据是聚集的,特别是球形或块状的聚类,再加上聚类与聚类之间的差距相当明显时,聚类算法的实际效果是很好的,但是它也有很多问题,仅当均值时才可以使用K-means是定义的,不适用于某些分类特性的数据信息。例如,如果每种隐式类型的数据信息不平衡,例如每种隐式类型的信息量更加严重,对齐不正确,或者每种隐式类型的标准差都不相同,那么聚类算法的实际效果就不好,最终结果与原始点的选择有关,很容易陷入局部优化,仍然需要科学研究。李全武等人 [12] 针对高速公路卡口抓拍的车辆图像,研究了一种利用K-means聚类算法进行道路背景检测的方法,并把占比最大的类别作为道路背景类别。
5.3. 自组织迭代数据分析法
必须事先人为地弄清K在K均值中的值,并且不能在所有优化算法的整个过程中篡改K的值。一旦接触到高维和较多数据时,通常很难准确确定K的大小。迭代自组织数据分析技术算法(ISODATA)优化改善了此问题,其概念也是很直观:如果属于某种类型的样本数量太少时,应该去除该类型;若是属于某种类别的样本数目太大并且分散程度大时,此类别应当划分为两个子类别类型。基于经验的启发式迭代过程被称作是ISODATA,即算法整体运行中的许多步骤都来自于实验中得到的经验值来递推运行。王鹏 [13] 等人对ISODATA分类算法进行了研究,在算法流程可并行性分析的基础上进行完善。赵泉华 [14] 等人将基于隐马尔可夫随机场(Hidden Markov Random Field, HMRF)方法加入ISODATA框架,在分裂与合并操作后添加了优化操作。在此阶段,大多数遥感影像解决方案软件工具(例如ENVI和ERDAS)都具有这种分类方法。
ISODATA优化算法基于K平均优化算法。它改进了“组合”和“分解”聚类算法结果的两个实际操作,并设置了优化算法的主要参数。“合并”的实际操作:当聚类算法的某个类别中的样本数太少或两种类型之间的距离太近时,请合并。“分解”的实际操作:当聚类算法得出某个类别时,样本的某个特征类别内的标准偏差会很大,并且这种发展会被分解。ISODATA算法主体部分的描述如下表1所示:
6. 实验及其处理分析结果
6.1. 实验配置环境
Ubuntu系统是本实验采用的主要系统,U-Net网络实现工具为Keras。该模型的训练和测试是在Tensorflow-GPU1.10和Ubuntu18.04和Cuda10.0以及Keras2.1.5配置环境下开展的,与此同时使用了 ENVI4.8进行相关实验,实验过程中对网络模型中的参数进行反复的迭代与调整,调整到训练网络模型达到预期效果为止。
6.2. 评价指标
在此实验中,Jaccard索引(也称为Jaccard相似系数)用于比较一组有限模式之间的相似性和差异。 Jaccard索引等于模式集和组合模式集的交集之比。可以说,这体现了集中模式的相似性和分散性的可能性。Jaccard系统标准值越大,图的相似度值越高,其表达式如公式(3)所示:
(3)
6.3. 结果分析
为了测试深度卷积神经网络结合CRF算法模型的性能,对于所有方法的内部参数设置成最优值,对遥感影像实验数据产生专题分类效果图。
6.3.1. 第一数据集及实验结果
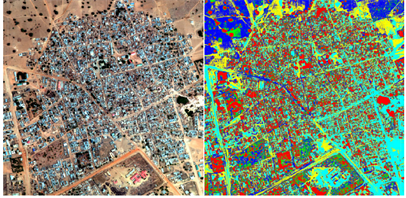
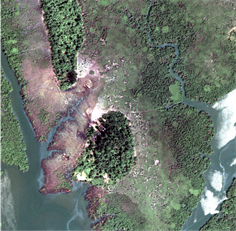
本研究采用的第一数据集的训练数据集的图像具有20个通道{RGB波段(3个通道) + A波段(8个通道) + M波段(8个通道) + P波段(1个通道)}以及相应的对象标签。共有8种标记轮廓的重叠对象(wkt数据类型),包括建筑物、道路、轨道、树木、作物、死水、大型车辆、小型车辆等。分割效果见图7。
图7是在基于ENVI4.8的实验环境下进行实验得到的分割效果图,在此基础上使用K-means算法与ISODATA形成对比实验,本文搭建的网络模型使用U-Net方法对实验数据图进行语义分割,分割波段图如图8及预测图见图9。
本实验训练集有3345个样本,测试验证集val有990个样本,根据实验结果能了解到网络对building、crop、Man-made structures、Track、Trees等类别分割效果较好,对road、Standing water、Vehicle Small等目标分割效果不完整,出现这种结果的主要原因可能是训练集中像素类别分布不均匀,准确率高的类别所占比例比较多,而准确率低的类别所占的比例小。也有可能是在遥感图像类别中占比比较小的在网络性能不够强的时候,对正确与错误这两种类别的理解不够充分,这将导致Internet收敛和分段特性降低。
 (b) k-means分割效果图
(b) k-means分割效果图 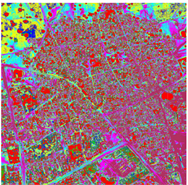 (a) 实验数据图原图
(a) 实验数据图原图  (c) ISODATA分割效果图
(c) ISODATA分割效果图
Figure 7. Classification effect diagram
图7. 分类效果图
6.3.2. 第二数据集及实验结果
本研究第二个实验数据集是由823行,824个,3个波段([BSQ]式)组成,含2,034,456字节样本。图像分割效果如下图10所示。
 (a) 实验图原图
(a) 实验图原图 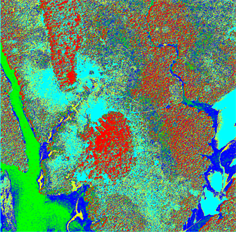 (b) K-means分割效果图
(b) K-means分割效果图 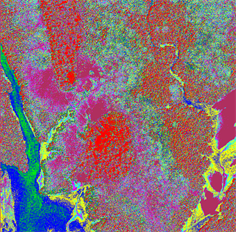 (c) ISODATA分割效果图
(c) ISODATA分割效果图 
Figure 10. Classification effect diagram
图10. 分类效果图
本文算法在测试集上的分割效果如图11和图12所示,表2是本文算法在分割时的网络训练参数。
根据实验可观察到网络对Waterway、Man-made structures、Trees、Slow water等类别分割效果较好,对road、Buildings、Crops、Track等目标分割效果不明显,出现这种结果的原因大概是实验数据图里相关像素类别分布不均匀,也有可能是迭代次数不够导致,提高这种分割方法的实际效果也是未来研究的内容之一。

Table 2. Network training parameters
表2. 网络训练参数
图13~15是本文算法从第1轮至第85轮迭代后loss函数与jaccard系数的相关曲线图,由图可知,loss函数基本上一直处于下降状态,神经网络在训练之前,我们需要给其赋予一个初值,但是如何选择这个初始值,则要参考相关资料,选择一个最合适的初始化方案。常用的初始化方案有全零初始化、随机正态分布初始化和随机均匀分布初始化等。合适的初始化方案很重要,用对了,事半功倍,用不对,模型训练状况不忍直视。loss损失函数相当于模型拟合程度的一个评价指标,这个指标的结果越小越好,一个好的损失函数,可以在神经网络优化时,产生更好的模型参数。
神经网络的优化器一般选取Adam,网络训练的速率和学习率密切相关,但它不是越高越佳,当网络趋近于收敛时应该选择较小的学习率来保证找到更好的点,为了挑选一个适宜的初始学习率,我们需要整改学习率,等到训练不了时,再调低学习率,然后再训练一段时间,这时候基本上就完全收敛了,一般学习率的调整是乘以或除以10的倍数,不过现在也有一些自动调整学习率的方案了,不过,我们也要知道如何手动调整到合适的学习率。还可以将学习率设置为在整个训练过程中连续降低,以防止学习过程中的梯度下降损害某个值范围内的往返波动。无论是培训还是测试,深层的CNN互联网都是非常耗时的整个过程。在Internet上进行培训和测试大约需要花费几天的时间,如果要获得满意的结果,则必须连续调整参数。另外,很有可能必须添加或删除Internet层的一部分以优化网络实体模型。因此,如何调整Internet的主要参数是本文方法中的关键问题。
7. 结语
本文的关键是使用Pytorch深度神经网络体系结构来完成Internet建设。经过85次迭代的更新训练,互联网的泛化能力得到了提高。图像语义分割是人工智能算法行业中的难题。传统的图像语义分割在技术上太逻辑化,难以理解,并且不使用大量图像数据来驱动语义分割的日常任务,无法完成大规模的图像解决方案,从而限制了其在特定应用中的市场推广。随着深层神经网络的基本理论和应用的发展趋势,深层CNN互联网继续得到清晰的提出。本文将CNN引入到遥感图像语义分割中,并根据结构卷积和神经网络完成了遥感图像的语义分割。可以通过测试结果看到,对于遥感图像中某些及其细微的区域分割结果不太理想,在今后的研究中,也应该对此进行进一步的探索。
基金项目
新疆自然科学基金项目(2019D01C337);国家自然科学基金项目(61663045);校级重点课题(2020YSZD01)。
NOTES
*通讯作者。