1. 引言
随着近代声学中,语音识别、语音增强、声源定位 [1]、声场成像、噪声抑制等音频方面技术的不断完善与应用,声音处理技术广泛地出现在了人们的生活当中。比如天猫精灵一类的智能音箱及实现定向增益的智能会议麦克风,又比如工业生产中的声音与振动分析。而这些技术的实现,多数依赖于麦克风阵列系统。同时,因为应用方向的不同,这些技术对于麦克风阵列系统的采样率、动态范围、信噪比、总谐波失真、阵元一致性、采样传输实时性,和通道间数据采样的同步性,麦克风的拓展兼容性以及设备体积,都有要求。
自上世纪八十年代以来,MEMS (微机电系统)技术发展迅速,使得微机械结构与微电路能够在硅片上集成,从而出现了使用沉积和选择性蚀刻工艺,将振动膜片和静态背板制作在硅晶圆基板上,再与配套的集成电路IC共同封装的MEMS数字麦克风。与传统麦克风相比,MEMS数字麦克风体积小,外围电路简单,且性能稳定,敏感性不受温度、湿度,时间和焊接加工工艺的影响。
而USB2.0接口,也广泛的存在于各类硬件设备之上,且USB2.0电缆结构简单,并能够提供480 Mbps的传输带宽。并且,随着微处理器技术的发展,出现了集成各种外设模块的微处理器芯片,其中不乏集成USB2.0高速接口的微处理器芯片。这些微处理器芯片中,多数都已有成熟的应用案例。而USB3.0普及程度较USB2.0差,且USB3.0电缆相对复杂昂贵,USB1.0则是无法提供设计所需要的带宽,且USB1.0接口几乎已经被淘汰。因此,本文的麦克风阵列采集系统选择USB2.0作为数据传输接口。
本文将从硬件和软件的层面,讲述如何利用微处理器与MEMS数字麦克风,在低成本和低复杂度且保证阵列性能参数的设计思路下,实现一种符合上述要求的麦克风阵列采集系统。
2. 麦克风阵列采集系统的硬件设计
麦克风阵列采集系统的硬件总体框架是通过一颗集成了FIFO并口转USB 2.0控制器的微处理器(CY7C68013A),以实现MEMS数字麦克风接口的数据与上位机之间的传输,从而保证了各麦克风通道之间采样和传输的同步性。并使用一颗集成USB 2.0全速接口和I2S接口的Cortex-M3单片机(STM32F103)接收上位机的指令参数,产生麦克风时钟和WS声道选择信号,同时兼容PDM (脉冲密度调制)和I2S两种接口的MEMS数字麦克风,可以支持1到14个PDM数字麦克风,或1到12个I2S数字麦克风。整体硬件设计框图如图1所示:

Figure 1. Block diagram of overall hardware design
图1. 整体硬件设计框图
2.1. 数据传输模块
由于本麦克风阵列采集系统,同时采样14个PDM数字麦克风时,各通道为3 MHz同步采样率,所以本麦克风采集系统总带宽最高为42 Mbps。因此,数据传输模块选择Cypress的CY7C68013A微控制器芯片。CY7C68013A提供了一个能够工作在8位或者16位,且传输速度最高96 Mbyte/s,带4K FIFO的并行接口。同时提供了一个智能USB控制器和USB2.0高速收发器,将并行接口接收到的数据传输到USB2.0接口,并集成了一个增强型8051内核用来运行程序 [1],CY7C68013A内部架构如图2所示 [2]:
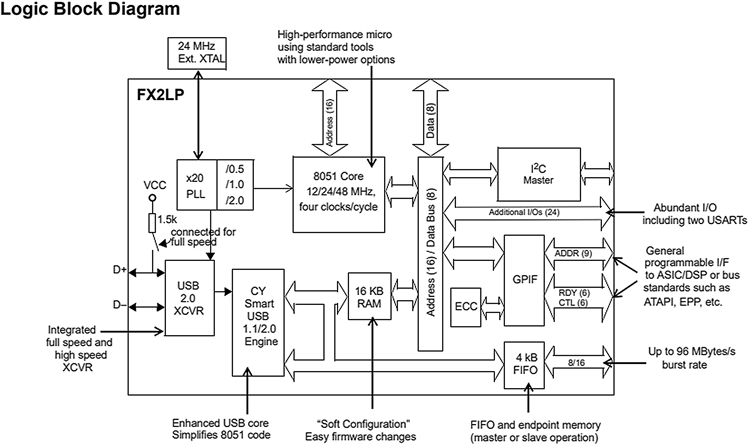
Figure 2. CY7C68013A internal architecture diagram
图2. CY7C68013A架构图
PDM数字麦克风的数据线左右2个通道为一组,连接到CY7C68013A的FIFO接口D1:D7,然后将全部的麦克风的时钟线与CY7C68013A的FIFO接口的D0连接。然后,通道1~7的麦克风左右片选线全部接VCC,通道8~14的麦克风左右片选线全部接GND,硬件设计如图3所示:
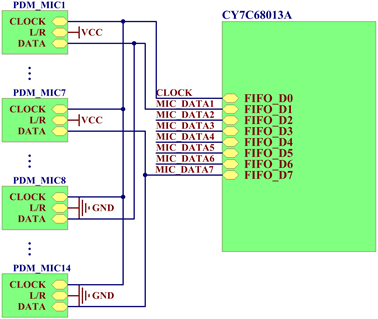
Figure 3. PDM microphone and CY7C68013A parallel port connection diagram
图3. PDM麦克风与CY7C68013A并口连线图
I2S数字麦克风的数据线也是左右2个通道为一组,连接到CY7C68013A的FIFO接口D2:D7,然后将全部麦克风的时钟线与CY7C68013A的FIFO接口的D0连接,再将全部麦克风的WS声道选择信号线与CY7C68013A的FIFO接口的D1连接。然后,通道1~7的麦克风左右片选全部接VCC,通道8~14的麦克风左右片选全部接GND。硬件设计如图4所示:

Figure 4. I2S microphone and CY7C68013A parallel port connection diagram
图4. I2S麦克风与CY7C68013A并口连线图
2.2. 麦克风时钟与片选信号发生模块
单片机型号选择STM32F103,其最高主频为72 MHz,支持外部晶振,并提供I2S接口,其I2S接口可工作在8 k~192 kHz的采样率下,最高时钟可达到12 MHz。同时片内集成USB全速控制器和USB PHY,可以通过USB接收来自上位机的关于麦克风种类以及麦克风时序逻辑参数的指令,给麦克风提供时钟和WS声道选择信号。
2.3. 麦克风模块
为了提高对麦克风的兼容性,麦克风模块设计成同时支持PDM和I2S两种数字麦克风。
PDM数字麦克风的接口由时钟线与数据线以及麦克风声道选择线组成,其接口图如图5所示。其中PDM数字麦克风的时钟信号,由外部的STM32F103单片机提供,麦克风Select线接高电平时,麦克风工作在右声道模式,麦克风Select线接低电平时,麦克风工作在左声道模式。左声道与右声道麦克风,可以共用一条数据线。在时钟信号上升沿时,右麦克风数据线输出数据,左麦克风进入高阻状态,当时钟信号下降沿时,左麦克风数据线输出数据,右麦克风数据线进入高阻状态。PDM数字麦克风接口时序逻辑图如图6所示。
PDM麦克风采样原理,是将声波转换为电压,然后经过∑-Δ调制得到数字信号,如果把这一连串数字信号放在同一标尺上和声波信号相比,会发现数字“0”和“1”随着声波的增减程度而产生密度的相应变化,所以称为脉冲密度调制 [3],如图7所示 [4]:
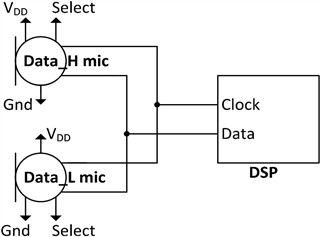
Figure 5. PDM digital microphone interface diagram
图5. PDM数字麦克风接口图

Figure 6. PDM digital microphone interface timing logic diagram
图6. PDM数字麦克风接口时序逻辑图

Figure 7. Pulse width coded modulation diagram
图7. 脉宽编码调制图
I2S数字麦克风的接口由时钟线、WS声道选择信号线、数据线、麦克风声道选择线组成,其接口图如图8所示。其中I2S数字麦克风的时钟信号,由外部的STM32F103单片机提供,麦克风Select线接高平时,麦克风工作在右声道模式,麦克风Select线接高平时,麦克风工作在左声道模式。左声道与右声道麦克风,可以共用一条数据线。WS声道选择信号线为高电平时,右麦克风数据线输出数据,左麦克风进入高阻状态,WS声道选择信号线为低电平时 [3],左麦克风数据线输出数据,右麦克风数据线进入高阻状态。I2S数字麦克风接口时序逻辑图如图9所示。其中每次采样对应的是一个24 Bit精度的数据对应为波形的幅值,即脉冲编码调制,如图10所示 [5]。
PDM数字麦克风选择ZTS6032,ZTS6032的灵敏度差异仅为±0.75 dB,信噪比可达61 dB,电源抑制比可以达到−80 dB,最高时钟频率为3.25 MHz [4]。

Figure 8. I2S digital microphone interface diagram
图8. I2S数字麦克风接口图

Figure 9. I2S digital microphone interface timing logic diagram
图9. I2S数字麦克风接口时序逻辑图
I2S数字麦克风模块选择MSM261S40H0R,MSM261S40H0R的灵敏度差异仅为±1 dB,其信噪比可达到61 dB,电源抑制比可以达到−72 dB,最高时钟频率为4 MHz,采样精度为24 Bit [5]。
由于所选两款型号的数字麦克风,在同型号麦克风个体之间灵敏度和频响参数差异极小,同时两款型号的麦克风均在电源抑制比以及信噪比参数上都比较优秀,所以,能够保证麦克风阵列阵元间的一致性,并降低耦合到声音信号中的电源噪声。
2.4. 电源模块
本设计使用上位机的USB接口供电,所以其主电源为5 V,而STM32以及CY7C68013A以及MSM261S40H0R和ZTS6032的工作电压均为3.3 V,所以,必须增加一级稳压电路。
而本设计不同的硬件模块,对电源噪声的要求是有区别的,其中CY7C68013A和STM32对电源噪声要求不高,而MSM261S40H0R和ZTS6032的电源噪声过大会导致其在声音数据采样过程中耦合进电源的噪声。所以,麦克风模块的稳压芯片选择低噪声的LP3993-33B3F。
电源部分的原理图设计如图11所示:

Figure 11. Schematic of the power supply section
图11. 电源部分原理图
3. 麦克风阵列采集系统的软件设计
本设计的软件分为两大部分,即下位机部分和上位机部分 [4]。
下位机部分由CY7C68013A微控制器固件,以及产生麦克风时钟信号和WS声道选择信号的STM32F103单片机固件组成。
上位机由负责接收CY7C68013A的USB接口数据的开源逻辑分析仪软件PluseView,以及对麦克风接口时序逻辑数据进行解码的解码软件组成,以及串口助手组成。
其中PluseView [6] 是一款开源的逻辑分析仪软件,由开源组织sigrok开发和维护,旨在创建一个可移植的,跨平台,免费/自由/开源的信号分析软件套件,并支持各种硬件设备类型。其基于GNU GPL,version 3授权许可。
程序部分结构及流程图如图12所示。首先,上位机中的STM32-USB驱动程序检测到STM32的USB-VCOM设备。然后,打开上位机的串口助手,按照程序设计时的指令格式,输入数字麦克风型号和采样率的参数,STM32的固件程序会根据USB接口收到的数字麦克风型号以及采样率,自动生成I2S参数,并初始化I2S接口的时钟以及是否使能片选信号。然后,PluseView判断是否存在CY7C68013A硬件设备,如果存在,将用于采集传输麦克风接口的固件下发到CY7C68013A中,并下发采集指令给CY7C68013A,CY7C68013A按照所设置的采样率开始采集麦克风接口的时序信号,并通过USB传输给PluseView,PluseView将所接收到的数据打包成二进制文件后,交给解码程序,按照用户输入的数字麦克风型号和采样率的参数,解析成WindowsPCM [7] 编码的wav音频文件。

Figure 12. Part of the program structure and flowchart
图12. 程序部分结构及流程图
3.1. 下位机软件
传输模块(CY7C68013A)的下位机固件,由PulseView通过USB下载到CY7C68013A的RAM中并执行,使CY7C68013A工作在24 MHz × 8位总线的工作模式,采集并口总线上的麦克风的时钟线、WS声道选择线和数据线的时序数据,并传输到上位机中。因为24 MHz的采样速度远大于麦克风模块最高4 MHz的时钟速度,所以此方案对于麦克风接口数据的采集传输是可靠的。
麦克风时钟信号和WS声道选择信号模块(STM32F103)的下位机固件,负责通过USB虚拟串口的方式,接收来自上位机的指令,然后按照上位机下发的数字麦克风型号、采样率的参数初始化I2S外设控制器的输出时钟,及是否使能WS声道选择信号,以适配不同采样率的PDM或者I2S麦克风。
3.2. 上位机软件
首先,通过上位机串口助手程序,向麦克风时钟与片选信号发生模块(STM32F103)发送麦克风型号和采样率参数。
其次,PulseView负责向CY7C68013A发送采样参数指令,并接收来自CY7C68013A的USB数据包,并将USB数据包中采样到的麦克风接口的时序数据,按照Raw binary格式保存为二进制文件。
最后,解码程序加载PulseView所保存的Raw binary二进制文件,先将其解码为各路麦克风对应的时序逻辑信号,然后再根据I2S或者PDM的时序逻辑,解析出各路麦克风所采集到的数据,如果是PDM编码,会再进行抽值滤波处理,然后将所得到的音频波形数据,按照WindowsPCM编码,保存为各路麦克风所对应的wav音频文件。
4. 数据采集与性能及可靠性分析
数据采集分析
首先,在声学暗箱中使用3 × 4平面方阵采集1 kHz的标准音频信号,其中麦克风之间间距小于1.5 CM。为了保证在近距离情况下,阵列采集到的声音数据为平面波,声源采用面盆大小为10寸的全频扬声器,扬声器的振动面盆大于麦克风阵列的面积,阵列中心与扬声器的面盆中心在同一直线,阵列面与扬声器的面盆保持平行。以保证在测试过程中,声波物理传播过程的同步性和一致性。
然后使用本麦克风阵列采集系统,按照48 K的采样率,24 Bit的采样精度,采集12路麦克风的音频数据,并保存成12个麦克风通道对应的wav文件,将wav文件导入到Audition中分析。
麦克风阵列所采集到的音频信号与扬声器所播放的音频信号的波形–时域图 [5],如图13所示。
以麦克风通道1作为参考通道,使用广义互相关算法,计算麦克风通道1与其他11路麦克风通道之间的时延差,得到表1所示的时延差数据。
其中,图13中,“Out_1kHz”通道是扬声器播放的音频信号的波形–时域图,该音频信号为1 kHz的正弦波,在时域上,存在振幅变化。“Channel 1”到“Channel 12”分别为麦克风阵列的阵元1至阵元12所采集的声音的波形–时域图。观察所有麦克风阵元的波形变化,可知在同一时刻中,各阵元采集到的信号的振幅基本一致,且各阵元间,信号振幅变化规律与扬声器播放的音频信号的规律一致,由此可证,各阵元通道间的灵敏度及信噪比参数的一致性良好。又通过观察各阵元间,所采集信号的振幅变化的起止时间基本一致,以及通过广义互相关,得到各通道间最大时延差为20.833微秒,约为1个采样点的误差,由此可证,各阵元通道间的数据同步性良好。
而对于麦克风阵列对音频数据的还原性,可通过对比阵元1与扬声器所播放的音频信号在同一段时间范围的波形–时域图,与频谱–时域图考证,其中图14为波形–时域图,图15为频谱–时域图。

Figure 13. The waveform-time domain diagram of the audio signal collected by the microphone array and the audio signal played by the speaker
图13. 麦克风阵列所采集到的音频信号与扬声器所播放的音频信号的波形–时域图

Table 1. Time delay difference data between microphone channel 1 and other 11 microphone channels
表1. 麦克风通道1与其他11路麦克风通道之间的时延差数据

Figure 14. The waveform-time domain diagram of the audio signal played by the speaker and the audio signal received by the microphone 1
图14. 扬声器所播放的音频信号与阵元1接收到的波形–时域图

Figure 15. The spectrum-time domain diagram of the audio signal played by the speaker and the audio signal received by the microphone 1
图15. 扬声器所播放的音频信号与阵元1接收到的频谱–时域图
由图14可以观察到,阵元1所采集的声音数据在与扬声器播放的音频数据,在同一段域时中,其波形的频率与变化趋势均一致,仅有波形振幅衰减。由图15可以观察到,在相同的时域范围内,阵元1所采集的声音数据的频谱–时域图,与扬声器播放的音频数据的频谱–时域图,基本一致。在阵元1的频谱–时域图中,存在少量2 kHz和3 kHz的谐波成分,而这一现象与扬声器性能及声学暗箱的性能相关。由此可证,此麦克风阵列采集系统能够较大程度还原音频信号,保留声音原有的特征。
5. 结论
本文根据现有的麦克风阵列采集设备所存在的价格昂贵,结构复杂,体积庞大的不足,结合USB并口转换微控制器,灵活地将MEMS数字麦克风的接口连接到USB接口芯片的并口,从而在采样准确性、传输速度、多通道同步性等方面,均达到了所期望的设计效果。并且,该系统综合实现成本极低,全部硬件成本在120元以下,模块化的设计可以让用户在1到14个阵元的范围内,任意选择麦克风阵元数及阵列形状。且该系统可同时支持PDM和I2S两种数字麦克风,具有极大的灵活性。本麦克风整列采集系统所传输的均为麦克风原始数据,数据的后期处理均在上位机中实现,保证了音频数据的完整性,便于后期算法开发及音频数据的处理。