1. 引言
由于航空航天传感器在摄影成像过程中,受天气和大气环境等外界因素的干扰,获取的可见光影像难以达到理想数据源的要求,比如因雾、霾、薄云等因素而导致影像灰度失真、细节丢失、地物模糊等等。尽管目前的影像匹配算法已经日趋成熟,但对于环境较为恶劣的情况,还是存在匹配不到连接点或匹配连接点稀少的问题,导致后期平差结果不收敛或空三加密成果精度不达标,继而耗费大量人工刺点甚至补摄、重摄等工作。
目前,航空航天相机中一般都搭载有近红外相机 [1]。由于近红外光波长较长,相对于可见光而言,拥有更强的穿透性。因而,采用近红外波段影像辅助空三连接点匹配,可以在一定程度上降低大气环境等干扰因素对空三加密的影响程度,减少人工干预工作量,节约因补摄或重摄而增加的额外生产成本。
本文针对ADS100影像,采用近红外波段辅助空三加密连接点的提取,结合可见光绿波段匹配的同名像点整体联合平差,并与传统的基于可见光绿波段空三加密成果进行对比分析,探讨基于近红外波段辅助空三加密精度的可靠性。
2. 近红外波段辅助空三加密原理
2.1. ADS100平差模型
ADS100是瑞士徕卡公司于2013年推出的三线阵推扫式航摄系统 [2]。该系统集成了全球卫星定位系统(GPS)和惯性导航定向系统(IMU),采用三线阵CCD扫描镜头,通过一次飞行同时获取前视、下视和后视100%的三度重叠影像,并采集全色立体影像和多光谱影像信息 [3]。ADS100高精度POS系统的应用极大程度上减少了外业工作量,提高了生产效率 [4],甚至实现无控平差 [5]。
由于ADS100的成像方式是多线阵推扫式的连续不间断成像模型,每个扫描线均对应独立的摄影中心 [6]。考虑系统存在的GPS天线偏心分量、GPS时间漂移及IMU视准轴误差等误差,须对初始方位元素进行有效改正才可保证平差模型的正确性 [7]。故此,经过相机检校后,单线阵的ADS100平差模型可表示为:
(1)
其中:
、
为像点坐标;
、
、
为对应的物点坐标;
、
、
为改正的初始方位线元素;
、
、
为改正的初始方位角元素,
为旋转矩阵,
为像主距。
式中,GPS/IMU初始方位元素的改正表达式为:
(2)
其中:
、
、
为初始方位线元素;
、
、
为初始方位角元素,
、
、
为初始方位线元素的改正值;
、
、
为初始方位角元素的改正值。
2.2. 近红外波段辅助空三加密流程
利用近红外波段辅助空三加密,是指在传统可见光波段空三转点的基础上,基于相同的匹配算法和策略,利用近红外波段再重新匹配一次同名点,并将两次匹配的同名像点一起进行后期区域网平差。
实际生产过程中,ADS100影像的空三加密主要是根据解算后的GPS/IMU数据、像控点以及0级影像来进行。由于ADS100影像数据的每一条航线都是无缝连接的带状影像,在加密过程中,每间隔一定的时间,需选择一张像片作为定向片,平差求解该定向片的外方位元素后,再通过内插计算出每条扫描线的外方位元素 [8]。
基于ADS100的近红外波段辅助空三加密的具体流程如图1:
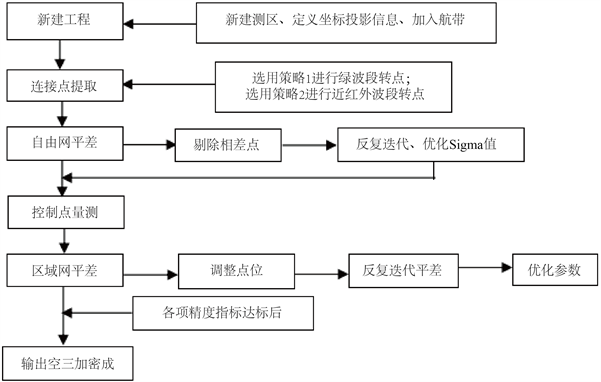
Figure 1. Chart of Aerial Triangulation based on the ADS100 NIR
图1. ADS100近红外波段辅助空三加密流程图
3. 实验及结果分析
3.1. 实验概况
本实验选取新疆托克逊库米什镇北为试验区,分区面积20.2平方千米,共4条航带,航摄比例尺为1:1000。分区内最高点977米,最低点792米,航高2034米,平均地面分辨率为0.1米。测区共布设了15个地面控制点,主要用于试验区的控制和检查。具体航摄结合图如图2:
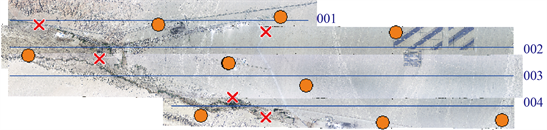
Figure 2. Aerial Map of The North of The Toksun County
图2. 托克逊库米什镇北航摄结合图
3.2. 连接点匹配
考虑到本测区地势较为平坦,大多为沙漠地区,选择连接点稀疏的匹配策略,以减少匹配时间。根据测区的具体情况,调整匹配文件中的起始像素、匹配间隔、搜索窗口等相关系数来确定连接点的密度 [9]。实验采用两种匹配方案分别进行连接点的提取。
方案一选用绿波段影像的前视(GRNF26A)、下视(GRNN00A)和后视(GRNB19A)波段进行自动连接点匹配。其中,以下视波段为匹配的主波段影像 [10]。自动连接点匹配分布图如图3所示。

Figure 3. The Distribution diagram of Image Matching based on Green
图3. 绿波段连接点匹配分布图
方案二采用近红外波段辅助空三连接点匹配,即在方案一绿波段连接点匹配的基础上,用近红外波段再重新匹配一次。在实际匹配时,将匹配策略中的起始像素PATTERN_LINE_START值由500更改至3000,使得两次连接点的位置错开,其余参数保持不变。近红外波段辅助连接点匹配分布图如图4所示。
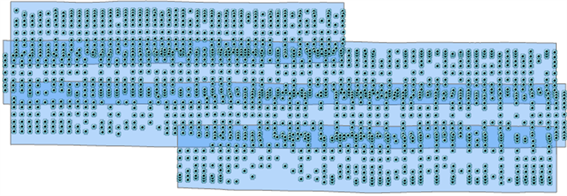
Figure 4. The distribution diagram of image matching based on the NIR & Green
图4. 近红外波段辅助连接点匹配分布图
根据方案一和方案二匹配的连接点分布情况,再结合Leica XPro软件的自由网平差后的同名像点参数指标,方案一匹配的连接点数量为1039个,像点中误差为0.03267,方案二匹配的连接点数量为1811个,像点中误差为0.02625。由此可知,基于近红外波段辅助连接点提取的同名像点数量,要远高于绿波段匹配的连接点数量,而匹配的连接点质量却大致相当。
3.3. 空三平差分析
运用Orima软件进行平差计算,设置初始单位权中误差Sigma0为2.5 (ADS100像素大小5 um,取1/3~1/2像素之间),设置好平差迭代次数、GPS、IMU参数及权重等参数,由于相机经厂家精检校,实验不开启自检校参数。平差计算完成后,查看空三精度选项卡。首先,调整单位权中误差值,逐次删除连接点中误差值大于1~1.2倍摄影地面分辨率的连接点,再重新平差。粗差剔除后,调整POS初始权重值,控制方差分量值为0.8~1.2之间。最后,将空三成果提交至工程。
本次实验共14个地面控制点,其中包含9个控制点和5个检查点。两种方案空三加密所得的控制点和检查点的中误差及残差最值如表1和表2所示。

Table 1. Results of aerial triangulation based on the Green
表1. 绿波段空三平差结果
Table 2. Results of Aerial Triangulation based on the NIR & Green
表2. 近红外波段辅助空三平差结果
由表1、表2结果可知,绿波段空三加密控制点平面精度为0.093,高程精度为0.077;绿波段空三加密检查点平面精度为0.173,高程精度为0.129。近红外波段辅助空三加密控制点平面精度为0.091,高程精度为0.053;近红外波段辅助空三加密检查点平面精度为0.170,高程精度为0.125。均符合航摄规范1:1000测图比例尺的要求(控制点平面精度0.30 m,高程精度0.20 m;检查点平面精度0.50 m,高程精度0.28 m)。
结合同名点匹配结果可知,近红外波段辅助连接点匹配的同名像点数量要更多。由ADS100的平差模型可知,同名像点的数量的增加,意味着其存在更多的多余观测,平差后可以提高计算成果的精度。实验结果表明,近红外波段辅助空三加密精度略优与单绿波段的空三加密精度,且近红外波段辅助空三加密后的检查点残差最大值趋小,残差最小值趋小,整体区域网平差模型相对更优。
4. 结束语
本文基于ADS100影像,分别采用近红外波段辅助空三连接点匹配方式和绿波段空三连接点匹配方式来获取影像同名点,并针对空三加密的成果进行精度分析。实验结果表明,采用近红外波段辅助空三加密的方式可以在一定程度上弥补由于外界环境等不利因素的影响,优化同名像点的提取数量,最终的空三加密精度也有一定程度的改善,能较好的满足大比例尺的航测需求。且基于近红外波段能穿透薄云、雾等特性,可以考虑将其推广应用于有云或有雾等恶劣环境。但本文的实验主要针对ADS100传感器而进行,若需推广至无人机和卫星影像方面的应用,尚需进行更多的实验来验证其可靠性和实用性。