1. 前言
随着有源相控阵雷达的发展,尤其对于大口径、高频段的有源相控阵雷达天线,阵面精度要求越来越高,往往为亚毫米级 [1] [2]。受环境载荷的影响,天线阵面通常产生较大变形,偏离设计形态,直接影响电性能指标,导致天线增益衰减,尤其是副瓣抬高,并最终影响雷达的整体的性能 [3] [4]。为保障电性能指标,工程中通常采用电性能主动补偿方法,消除结构变形的影响。准确地感知天线阵面形状是实现电性能有效补偿的基础。因此,如何通过嵌入天线阵面结构的应变传感器获得测点处的应变准确数据,如何从有限测点处的应变数据重构结构位移场,成为当前研究热点问题。
针对上述问题,国内外学者分别从应变传感器、阵面重构等方面开展了系列研究。对于应变量的测量问题,常用的传感器有电阻应变式传感器(应变片、柔性电子等)、光纤传感器(光纤光栅等)。这两种传感器都属于接触式测量,即需要将传感器的感应区域与被测物体表面贴合固定,利用物体表面的形变带动敏感区域的形状发生变化,实现物理量转换为电信号。光纤传感器常用的两种传感手段分别为光纤Bragg光栅技术、光纤布里渊时域反射技术(BOTDR),适合于大型刚性结构的应变监测(结构如桥梁、建筑等) [5] [6]。影响光纤光栅器件传递应力的关键环节是光纤光栅与被测物的粘接,被测物的材料属性、粘接层的材料特性,以及粘接体结构尺寸均会对应力传递的效果产生影响。
在结构形变重构方面,常用的方法有模态法、逆有限元法、神经网络法等。Kang基于模态法的应变–位移转换关系,通过光纤Bragg光栅传感器测量的应变数据重构结构动态变形,并以梁结构为算例进行重构实验,验证了模态法重构的有效性 [7]。模态发具有重构精度高、计算快速稳定的优点,但依赖于仿真模型的准确性,受模型误差和测量误差影响较大。Cerracchio基于逆有限元方法对典型的复合材料加工结构进行了形状传感分析,通过有限的离散应变数据重构位移场,并讨论了三角形逆壳单元的建立,给出了几种静态、动态和热载荷的数值结果,表明该方法鲁棒性较好 [8]。逆有限元法应用范围小,仅适用于典型梁结构,受测量误差影响较大。Bruno提出一种模拟退火与神经网络相结合的方法,通过训练实验样本构建目标结构应变与位移之间的关系,最后通过少量测量应变推断出当前结构的变形状态 [9]。神经网络法通常需要大量的样本数据,受样本数据误差影响,稳定性差。
针对天线阵面变形重构问题,在上述研究基础上,本文开展了光纤应变传感器测量准确度、传感器布局和变形重构研究,提出了天线阵面变形重构方法,设计了天线阵面变形重构实验系统,为雷达电性能主动补偿提供了技术支撑。
2. 光纤应变传感器测量准确度研究
光纤光栅应变传感器在应变测量中,光纤光栅与被测物协同变形的程度表现为应变测量的效果。影响光纤光栅器件传递应力的关键环节是光纤光栅与被测物的粘接,被测物的材料属性、粘接层的材料特性,以及粘接体结构尺寸均会对应力传递的效果产生影响。为此,本文基于应变传递效率研究不同阵面材料下最佳的粘接层材料选择,以及粘接体尺寸对应变传递效率的影响。
1) 应变传递效率的定义
根据光纤传感器件截面远小于基体截面积、基体应力均匀等条件,依据弹性力学方程,光纤传感器件感受到的应变
与基体实际应变
之间的关系如下式:
(1)
式中,
,
,
,
分别为光纤器件、粘结层材料、被测物集体的杨氏模量;
为被测物的泊松比;L为粘结层的长度;
,
,
分别为被测基体厚度,光纤直径和粘接层厚度;
,
,
分别为基体、粘结层、光纤器件的截面积。
定义有粘结层决定的应力传递效率K为:
(2)
即,
,该式表明,在不同的被测基体材料下可以通过选择合适的粘接材料和优化粘结层尺寸来提高传递效率K。
2) 基于传递效率的应变测量准确度研究
在实际的应用情况下,被测物和光纤的材料属性都是可以通过精确的测试获取,根据上式对于应变传递效率的定义,可以看出当粘接体的尺寸参数一定时,粘接体的弹性模量将唯一决定应变传递效率,通过求解应变传递效率对粘接体弹性模量的一阶偏导可得:
(3)
式中,
,
;令
,可得到最优的粘接体弹性模量,并由此选择合适的粘接剂。
根据以上的理论分析,工程中可以首先通过实验验证在不同阵面材料下理论模型的正确性,并进一步结合获得相关实验测试数据,进行理论模型的修正,得到更加准确的应力传递效率模型。根据此模型,针对不同的阵面材料通过选择合适的粘接剂以达到最优的应力传递效率。
3. 传感器网络布局研究
基于应变的变形重构方法,其中有效应变信息的采集是影响变形重构准确率和效率的一个关键因素,合理的传感器布局不仅可以保证信息采集的完备性,也可以有效地避免信息的冗余,减少传感器的使用率和提高计算效率。为此,本文基于模态法形变重构方程,提出一种两步序列传感器布局方法,图1给出了传感器布局方法的流程图。第一步,基于聚类准则确定初始传感器布局位置。第二步,在第一步的基础上,以重构误差最小为目标函数,以传感器位置的空间相关度为约束条件,从剩余的候选位置集合中逐个选取新的位置添加到传感器位置集合中。对于大规模工程结构,逐步累加相对于逐步减少方式计算量要小很多。此外,所提出的方法在第一步布局中,采用聚类准则保证了传感器位置模态信息的完备性,在第二步中考虑传感器位置的空间相关度问题,删除与已有布局位置冗余的传感器位置,在接下来的计算中也会大大减少计算量。
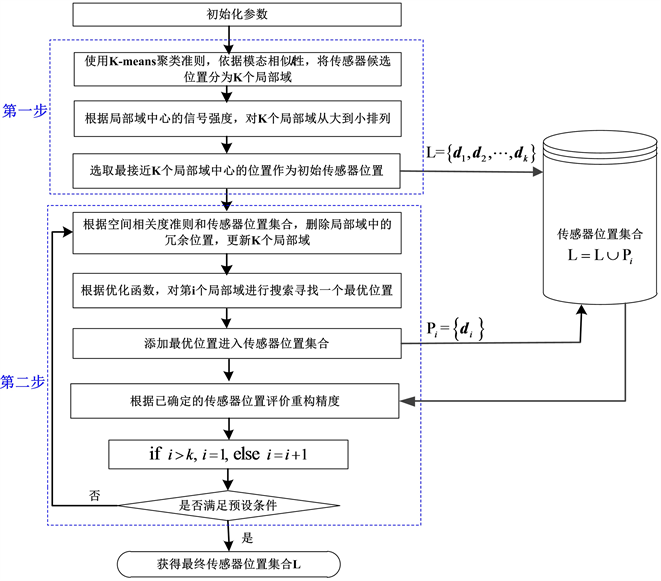
Figure 1. Flow chart of sensor layout method
图1. 传感器布局方法的流程图
4. 天线阵面结构变形重构方法
确地感知天线阵面形状是实现电性能主动补偿的基础。基于测量应变的阵面变形重构方法,可以根据嵌入天线阵面结构的应变传感器获得的测点处的应变数据,实现对阵面形状的感知。而该重构方法的最关键步骤就是应变—位移转换矩阵的构建。本项目在模态法基础上,通过引入有限的实验模态信息,并利用局部对应原理(LC原理)通过有限元模态振型扩展实验模态振型,进而得到更加贴近实际的模态信息,最后利用扩展的实验模态构建重构方程。
1) 模态法变形重构方程
根据模态叠加原理,天线单元中心的位移
可以用模态坐标
表示为:
(4)
式中,位移模态矩阵
为
的矩阵,r为系统的截取模态数。
与位移表述相同,天线单元中心的应变
也可以用模态坐标
表示为:
(5)
式中,应变模态矩阵
为
的矩阵,r为系统的截取模态数。
在实际工程中,考虑传感器所在的位置,则测量应变
为:
(6)
式中,
为应变模态矩阵中对应传感器位置的应变模态子矩阵,m为传感器数目。
由式 和式 可知,当传感器数目大于等于截取模态数目时,
的最小二乘解为:
(7)
式中,
表示
的伪逆,即
。
将式 代入式 ,可得应变–位移转换方程:
(8)
式中,
为重构位移值,
为天线单元中心位置所对应的位移模态矩阵,
为应变–位移转换矩阵。
2) 构建各阶实验模态振型的投影向量
首先根据计算模态分析结果初步确定实验模态测点,进行实验模态测试。获得有限点的位移模态振型后,将实验模态测试自由度分为两组,一组为拟合自由度,另一组为观测自由度,即:
。根据有限元模型模态分析提取的模态信息,将有限元位移模态振型
分为具有和原实验位移模态有相同数量的a个自由度振型
和d个剩余自由度振型
。然后再将
分为与实
验模态具有相同拟合自由度和观测自由度的振型,即:
。根据有限元模态
所对应频率到所扩展实验模态频率之间的距离,由近到远排列有限元模态振型,建立一个有限元模态振型列表。从而建立起第i阶实验位移模态的投影向量,即:
(9)
3) 利用平滑扩展后的实验位移模态建立重构方程
根据投影向量
计算第i阶观测集估计实验模态:
(10)
通过计算观测集估计实验模态与所测实验模态的(模态置信准则) MAC值找到对应最大(振型相关系数)MAC值的最优模态数目
,即最佳振型数。用下式得到第i阶实验位移模态的平滑扩展模态:
(11)
重复上述步骤,得到平滑扩展后的K阶实验位移模态
。通过采集的应变数据
,建立重构方程:
(12)
5. 变形重构实验系统及实验验证
设计变形重构实验系统,以验证上述理论和方法的正确性和有效性,其样件设计与实验方案如下所述。
柔性结构极易受外界环境的影响而发生变形,因此以某柔性球体天线结构为对象设计试验系统。柔性球体结构如图2所示,基于共形化设计的思想,以球体表面作为载体,在一部分球体的内部复合柔性轻型天线阵面,外部设置感知层。进而既可以实现球体的形变感知,又使其能够具备电磁收发功能。
本文所研制的复合球体蒙皮结构中,不仅集成了智能感知层,还有射频功能层。其中射频功能层采用工作于X波段的柱面共形阵,能够对空间的电磁波信号进行接收以及辐射;智能感知层由柔性FBG传感器网络构成,可以对载荷作用下的球体形变进行实时监测和模型重构,不同功能层通过复合工艺实现加工和制作。另外,该实验系统还包括形变模拟装置和光纤光栅解调仪,其中形变模拟通过改变球体内部的气压实现,以模拟实际工作状态下的典型受力特征;光纤光栅解调仪则采用波分复用原理对分布式测量得到的波长变化进行采集和解算,为重构模型提供准确实时的应变信息。为了验证形变重构结果的正确性,将采用对比试验,以基于三维数字图像相关技术的非接触式测量结果作为参考,与利用FBG传感器测量并进行重构得出的形变数据进行比较和误差分析,验证测量精度等指标的达成情况。
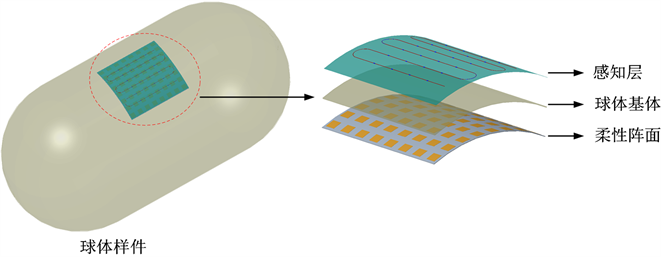
Figure 2. Composition diagram of flexible sphere
图2. 柔性球体组成示意图
实验步骤如下:
Step1:选取不同的阵面材料样件,分别采用不同弹性模量的粘接剂粘贴传感器,通过由应变信息反求挠度并与实测结果比较,验证建立的应变传递效率方程的正确性,并进一步结合理论模型针对球体材料进行粘接体尺寸对应变传递效率的研究,以最终获得球体材料粘接剂和粘接尺寸的最佳选择。
Step2:研制并加工复合球体结构样件,基于力学和电磁性能要求分别对球体基体、射频功能层和智能感知层等进行结构设计,并基于所提出的传感器布局方法对传感器网络进行优化布局设计。在此基础上,通过复合工艺对球体结构样件进行加工制作。
Step3:进行形变感知和监测试验,通过改变球体内部的气压模拟球体产生不同工况的形变,利用感知层采集应变数据,并基于重构模型通过计算处理得到形变信息。
Step4:实验数据处理与模型修正,借助非接触式测量系统同步对样件的形变测量数据进行采集,通过实验数据的对比分析以修正重构模型。
应变测量实验结果如图3所示,球体起始测量压力为300 Pa,持续加压,每隔100 Pa记录一次试验数据,最终球体气压为3000 Pa。囊体环向和轴向应力与囊体的曲率大小以及内外压差载荷有关。实验过程表明,采用应变传感器对粘贴剂要求较高,采集的信号噪声较大,信号突变性强;采用光纤光栅传感器信号较为稳定。
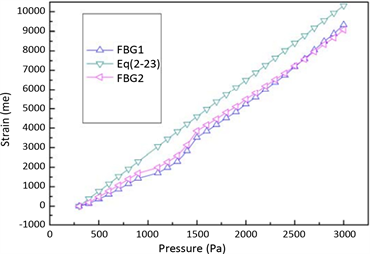
Figure 3. Experiment and results of fiber Bragg grating sensor
图3. 光纤光栅传感器试验及结果
6. 结束语
雷达是典型的以“电”为目标、以“机械”为载体的综合集成装备,天线阵面变形对其电性能有着决定性的影响。为有效补偿雷达电性能,消除结构变形影响。本文首先介绍了光纤光栅传感器测量方法和分析了影响测量准确度材料参数。其次,基于模态法形变重构方程,提出一种两步序列传感器布局方法。通过引入有限的实验模态信息和局部对应原理,得到更加贴近实际的模态信息,提出了基于模态发的天线阵面变形重构方法。最后,设计了天线阵面变形重构实验系统,介绍了实验步骤,实验结果证实了利用光纤光栅传感器进行应变测量的有效型,为复杂载荷环境下雷达电性能主动补偿提供了技术支撑。