1. 引言
我国高速铁路建设发展迅速,运营里程居世界首位,各项新技术在高速铁路、城际铁路得到了应用,其中就包括动车组自动驾驶(ATO)技术。ATO技术之前在国内外城市轨道交通中已经得到广泛应 [1] [2] [3],近年来已开通运营的莞惠城际、佛肇城际等城际铁路均运用了ATO技术 [4] [5] [6],在京张高铁等高速铁路中该技术也将在逐步推广运用 [7] [8] [9] [10]。ATO与人工两种驾驶模式在操作中存在一定差异,导致列车牵引制动时机及性能发挥程度不同,进而导致进出站列车速度不同,影响车站间隔时分 [11] [12]。为满足高速铁路高标准运营要求,有必要对两种驾驶模式的车站间隔时分进行分析研究。本文以京沈客专朝阳站至新民北站段的ATO与人工测试试验为案例进行研究分析。
2. 数据处理
2.1. 数据来源与用途
本次分析以调度所实时CTC数据、车载ATO数据及随车记录数据为基础,以车载ATO数据作为分析车站间隔的主要数据来源,试验车型均为搭载300T列控系统的CR400-BF。通过对照上述数据的列车运行关键节点来保证数据分析的准确性。
数据分析用途:1) 分析测试列车的速度、间隔;2) 对比两种驾驶模式下的VS曲线,分析两种驾驶模式的差异;3) 对比研究ATO与人工两种驾驶模式下进出站各个环节的时间、速度差异。
2.2. VS曲线生成
车载ATO所记录的运行里程、速度、ATP限速等时空轨迹数据中存在很多数据冗余,需要通过数据清理、轨迹压缩、轨迹分段等预处理方法转化为校准数据,然后利用mathlab仿真生成VS曲线,便于后续对比分析。
生成后的VS曲线见图1和图2所示:
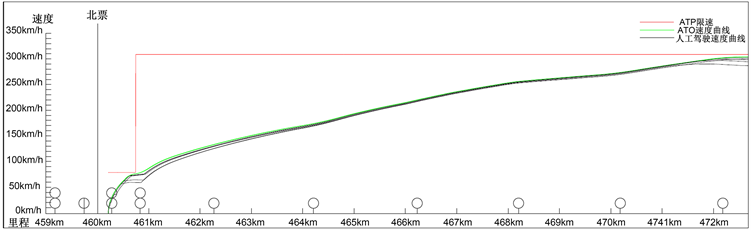
Figure 1. Train departure VS curve schematic diagram of Beipiao station
图1. 北票站列车出发VS曲线示意图
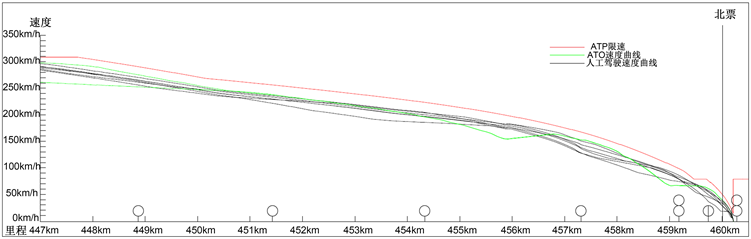
Figure 2. Train arrive VS curve schematic diagram of Beipiao station
图2. 北票站列车到达VS曲线示意图
3. 出发间隔
3.1. 出发间隔分析方法
列车出发间隔是指自前行列车由车站发出时起,至由该站同方向再发出另一列车时止的最小间隔时间,它包括前行列车从车站出发至出清第一个闭塞分区时间和办理后行列车出发作业时间 [13]。
根据测试随车观察及调度所CTC记录数据,ATO与人工两种驾驶模式下的列车出发进路办理流程与时间相同,且ATO模式下司机仍需完成与人工模式相同的操作流程(如确认信号、仪表等),才能按下ATO按钮发车 [14] [15],因此两种驾驶模式下的列车出发作业附加时分均相同。故本次研究以列车从车站出发至出清第一个闭塞分区(一离去)的走行时间差异来对比ATO与人工驾驶模式下的出发间隔差异。
如图3所示,将列车从车站出发至出清第一个闭塞分区的走行时间分解为三个部分:F1、F2和F3。其中,F1表示列车启动至车头越过出站信号机时间;F2表示列车车头越过出站信号机至车尾出清逆向进站信号机的时间;F3表示列车车尾出清逆向进站信号机至列车车尾出清一离去时间;F1+F2+F3表示列车自启动至列车车尾出清一离去总时间。
3.2. 出发间隔测试结果分析
根据测试情况,共收集到上下行方向各站有效出发样本94个,其中ATO样本30个,人工驾驶样本64个。根据ATO与人工驾驶VS曲线,结合列车出发各个环节时间的最大值、最小值及平均值统计数据后分析发现:
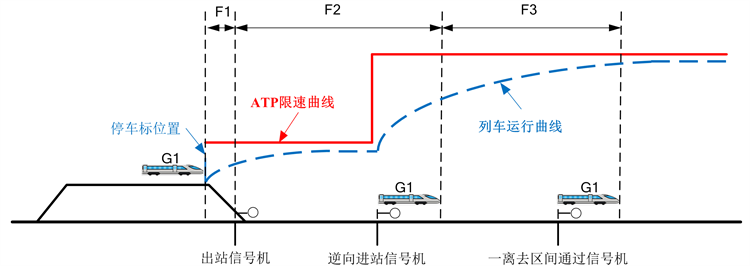
Figure 3. Schematic diagram of train departure links
图3. 列车出发各环节示意图
1) ATO模式下,列车咽喉区(出站信号机至逆向进站信号机)平均走行时间较人工模式少0.8~7.4 s,列车出清一离去的平均时间较人工驾要少0.5~8.7 s。根据随车观察记录,ATO驾驶模式下列车牵引功率使用系数达到100%,较人工模式高,因此,ATO模式下的出站运行速度更高,走行时间更短。
2) ATO驾驶模式出发时间更稳定,更短。人工驾驶受司机驾驶经验及熟练程度的影响,列车在咽喉区及一离去运行速度差异较大,出发时间长短不一,波动较大。结合测试计划中司机分配情况,驾驶经验丰富的司机出发所用时间与ATO模式较接近,而其他司机出发所用时间较ATO模式相差较大,最大可相差10~30 s。
4. 到达间隔
4.1. 到达间隔分析方法
列车到达间隔为前行列车车尾出清反向出站信号机至同方向后行列车车尾出清反向出站信号机止的最小间隔时间。列车到达间隔包括办理后行列车到达作业时间和后行列车由正常运行速度降至规定速度进站,车尾出清反向出站信号机的时间 [13]。
根据现场测试实际情况,ATO与人工两种驾驶模式下的列车到达作业附加时分均相同 [13] [14] [15],因此本次分析不考虑到达附加作业时分。为有效对比两种驾驶模式下的到达间隔,本次研究对列车从ATP降速点运行至站内停稳的关键过程进行分解,对比分析ATO与人工两种驾驶模式下ATP降速点运行至站内停稳各个环节走行时间的差异,以判断ATO驾驶策略对列车到达间隔的影响。
如图4所示,本次研究将列车进站过程分解为三个部分:T1、T2和T3。T1表示列车自ATP降速点运行至车尾出清进站信号机的时间;T2表示列车车尾出清进站信号机至车尾出清反向出站信号机的时间;T3表示列车车尾出清反向出站信号机至停稳的时间;T1+T2表示列车自ATP降速点运行至车尾出清反向出站信号机的时间;T1+T2+T3表示列车自ATP降速点运行至列车停稳的总时间。根据调度所CTC所记录的联锁办理过程及现场测试记录数据分析,前方列车在出清反向出站信号机后,即可为后行列车办理接车进路 [16] [17],因此仅对比列车自ATP降速点运行至车尾出清反向出站信号机的时间(T1 + T2时间)即可分析两种驾驶模式到达间隔的差异。
4.2. 列车到达间隔测试结果分析
根据测试情况,共收集上下行方向各站有效到达样本107个,其中ATO样本37个,人工驾驶样本70个。根据ATO与人工驾驶VS曲线,结合列车进站各环节的数据以及随车记录观察情况对比分析发现:
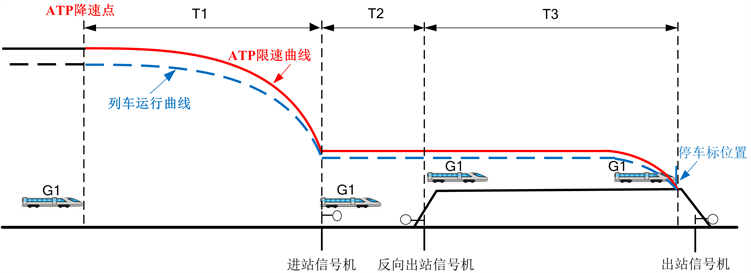
Figure 4. Schematic diagram of train arrival links
图4. 列车到达各环节示意图
1) 本次测试中,ATP限速点至进站信号机的运行过程,人工驾驶模式曲线趋向一致,而ATO驾驶模式由于接受运行计划时机问题导致列车为寻求正点到达车站,其速度曲线存在降速与不降速两种场景 [18] [19]。一是ATO接收运行计划后,后续区间运行时分偏紧,列车不降速仍以较高速度运行进站,该场景ATP限速点至进站信号机的走行时间较人工驾驶模式压缩4 s。二是ATO接收运行计划后判断后续区间运行时分较为富裕,ATO调整驾驶策略,以正点到达为目的,提前降低列车的运行速度进站,该场景ATP限速点至进站信号机的走行时间较人工驾驶模式增加3.9~19.1 s。
2) 进站信号机至出清反向出站信号机的列车平均运行速度,ATO模式比人工模式高。ATO模式下列车的咽喉区走行时间更短,平均可缩短3.7~21.3 s。
3) ATP侧向进站限速自道岔中心里程开始,进站信号机通常在最外方道岔100 m之外,而ATO驾驶模式中,由于考虑了乘客舒适度因素 [20],进站信号机外方设置68 km/h的固定限速,导致列车实际运行曲线与ATP曲线距离较远,不利于压缩到达走行时间。
4) 综合上述因素,在本次测试中,部分场景ATO驾驶模式较人工驾驶模式到达走行时间缩短3.2~16.4 s,部分场景ATO驾驶模式较人工驾驶模式到达走行时间较增加1.5~13.6 s。
5. 结束语
对比人工驾驶模式,ATO模式下控车更加精准,列车可以贴近ATP曲线运行;ATO驾驶模式下的出发间隔较人工驾驶模式更短但压缩效果不明显;根据试验数据及生成的VS曲线对比分析,如果ATO系统在进站信号机前不设置固定限速、进站走行阶段不采取降速策略,到达追踪间隔较人工驾驶模式可以实现进一步压缩。