1. 引言
鱼雷试验中为了解鱼雷攻击目标性能,通常在鱼雷加装同步声信标,由布放在目标附近的水声跟踪定位系统来跟踪鱼雷的运动轨迹 [1]。如图1所示,鱼雷同步声信标发出同步声脉冲信号,经过海洋信道传输后,到达水声跟踪定位系统接收端,接收端接收同步声信号并对之进行处理,估算出一个同步周期内同步声信号前沿相对同步周期开始时刻的时间差,进而可以估算鱼雷的距离等参数 [2] [3]。
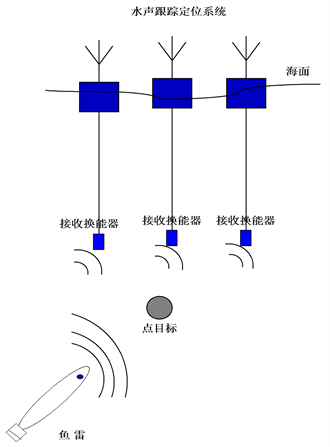
Figure 1. Schematic diagram of synchronous acoustic beacon and underwater acoustic tracking and positioning system
图1. 同步声信标与水声跟踪定位系统示意图
由于海洋声信道是随机时–空–频变参、强多径、高噪声和有限带宽的信道。因此,在水声跟踪定位系统中接收端除了接收同步声信号外,还掺杂海洋环境噪声和舰船、鱼雷自噪声等 [4]。海洋环境噪声主要分布在低频段,而鱼雷自噪声与航行速度有关,且随着速度的增加而急剧增大,结果同步声信号在传输过程中被噪声所“淹没”。因此,为了获取鱼雷方位、距离等信息,必须对被噪声“污染”信号进行处理,将感兴趣的同步声信号提取出来 [3] [4] [5]。
2. 同步声信号处理系统
假设某接收端输入信号为
式中,
为同步声信号,A为其信号幅度, 为信号相位,
为信号载频,
为零均值高斯白噪声。本文采用MATLAB的randn函数产生噪声,如图2所示。
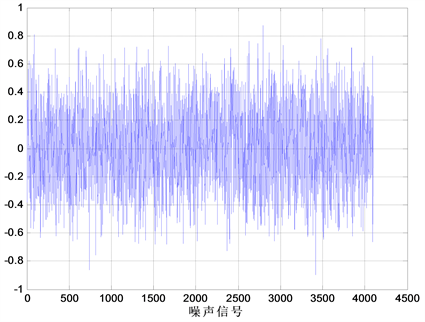
Figure 2. Noise generated by randn function
图2. randn函数产生的噪声
由于同步信号的各种参数,如高频信号频率f0、周期T、脉冲宽度d等已知。因此,根据这些特点建立如图3所示为同步声信号处理系统。
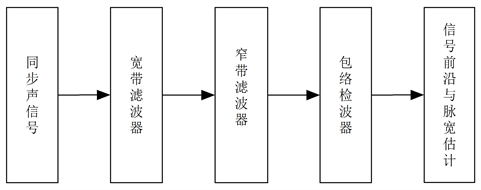
Figure 3. Synchronous acoustic signal processing system
图3. 同步声信号处理系统
图3中,首先采用宽带滤波器对接收端输入的同步声信号进行滤波,再由窄带滤波器对宽带滤波器输出进一步滤波。经过两级双重滤波后,采用包络检波器估计信号前沿与脉冲宽度以便估算时延并剔除由于多途干扰引入的虚假脉冲。
由于噪声带宽比较宽并且主要分布在低频段,而宽带滤波器和窄带滤波器通频带相对于噪声带宽小很多,并且滤波器的中心频率相距零频很大。因此,可将噪声近似看成带通滤波器和窄带滤波器通带内的白噪声。当被白噪声所“淹没”的同步声信号通过中心频率为f0的高通宽带滤波器后,带宽外的噪声将受到抑制,而通带内的同步声信号几乎无衰减地通过,被测信号的信噪比得到改善。此后再经过窄带滤波器处理后,窄带外的噪声再次被大幅度地衰减。与此同时,窄带内同步声信号仍几乎无损耗地通过滤波器。经过两级滤波处理的被测信号信噪比得到大幅度提高,相当于有用信号得到增强 [6] [7]。
3. 仿真实验与结果分析
基于第2节的论述与分析,为验证文中构建系统的可用性,对其进行MATLAB仿真验证。仿真中为更好表述系统检测性能,仿真参数设置如下:采样数据长度为4096,采样率为260 KHZ,同步声脉冲所在区间为[1800, 2269],仿真参数设置如表1所示。

Table 1. Simulation parameter setting
表1. 仿真参数设置
图4展示了信噪比0 dB条件下接收端的输入信号、宽带滤波器输出信号以及窄带滤波器输出信号仿真波形图。对比三个信号波形可看出,由于信噪较低,从接收端的输入信号中几乎看不到同步声信号,经过宽带滤波器处理后,信噪比得到改善。但是,在宽带滤波器输出信号中同步声信号还是不够清楚,通过窄带滤波器滤波后可明显看到一个同步声信号包络。由于该信号包络前后沿不够陡,因此不利于估计同步声前后沿。图5则是包络检波器的输出波形。
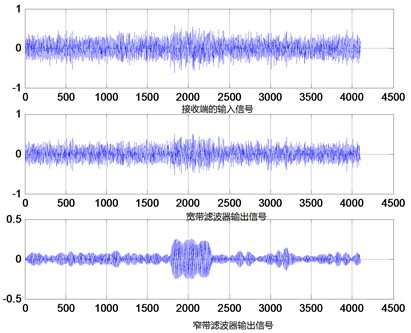
Figure 4. Receiver input signal, wideband filter output signal, narrowband filter output signal waveform with 0 dB SNR
图4. 0 dB信噪比接收端输入信号、宽带滤波器输出信号、窄带滤波器输出信号波形
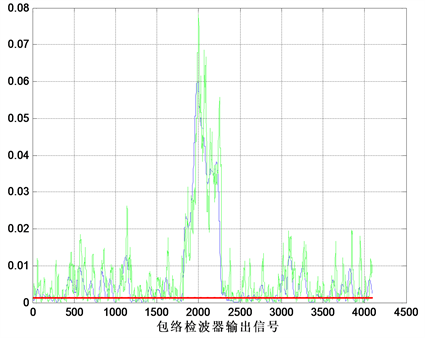
Figure 5. Output signal waveform of envelope detector with 0 dB SNR
图5. 信噪比为0 dB条件下包络检波器的输出信号波形
由图5可看出,窄带输出经过包络检波器后包络前后沿非常陡,因此能较容易估算出信号脉冲前沿以及脉冲宽度。
图6给出了信噪比为3 dB条件下接收端的输入信号、宽带滤波器输出信号以及窄带滤波器输出信号仿真波形图。由于信噪比较大,从接收端的输入信号图可较明显看出幅度稍大的同步声信号包络,即图6中区间[1800,2269]。
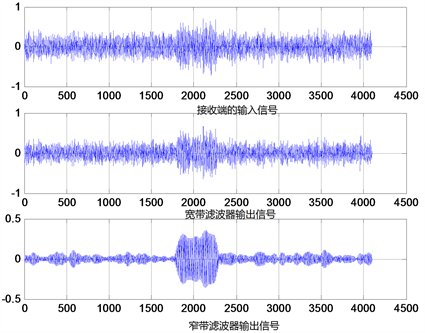
Figure 6. Receiver input signal, wideband filter output signal, narrowband filter output signal waveform with 3 dB SNR
图6. 信噪比为3 dB接收端的输入信号、宽带滤波器输出信号以及窄带滤波器输出波形
由图7包络检波器输出信号图可以看出,经过两级滤波处理后的噪声信号幅度已经非常低,能较准确估算出信号脉冲前后沿以及脉冲宽度,而且输入信号信噪比越大,系统的检测性能越好。
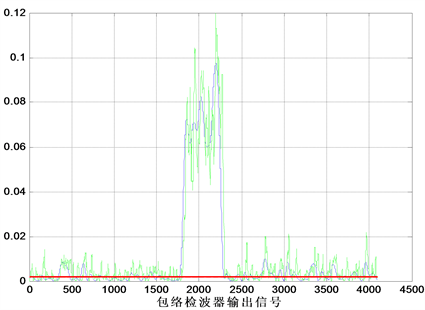
Figure 7. Output signal waveform of envelope detector with 3 dB SNR
图7. 信噪比为3 dB条件下包络检波器的输出信号波形
由于鱼雷攻击目标时鱼雷与水声跟踪定位系统之间距离较小,而且同步声信标的声源级一般设计比较大。因此,接收端输入信号的信噪比往往可达10 dB以上。由此可见,在信噪比较低条件下,本文构建信号处理系统能较好地估算信号前沿和脉冲宽度,可以满足大多数实际应用需求。
4. 结论
本文针对水下同步声信号参数已知并且是高频窄带信号的特点,构建了一种对同步声信号进行宽带滤波预处理,再进行窄带滤波,最后采用包络检波器估算信号前沿与脉宽的同步声信号处理系统。仿真结果表明即便在输入信号信噪比较低情况下,该系统仍能较好地检测出同步声信号并具有较高的时延估计性能,具有很好应用潜力。
致 谢
感谢国网浙江省电力有限公司温州供电公司对本论文的支持。
基金项目
国家某重点科研项目(MJ-2016-S-42,MJ-2018-S-34),国防基础科研计划项目,国网浙江省电力有限公司科技项目(2020年),陕西省创新能力支撑计划项目(2019PT-03)以及全军共用信息系统装备预研专用技术项目、装备预先研究项目(共用技术)。