1. 引言
在现代信息化战争中,雷达作为一种远距离的电磁传感器,在远距离目标的探测、跟踪等方面发挥着近乎不可替代的作用 [1]。MIMO雷达作为一种新体制雷达 [2] 充分综合了相控阵、组网技术和MIMO通信技术 [3],在抑制干扰、提高分辨率,克服目标的RCS闪烁问题上有着独有的优势。雷达系统的性能提升往往以系统资源的消耗为代价。MIMO雷达特别是分布式MIMO雷达 [4] 涉及到的资源更为丰富,主要包括阵元、功率、波形、以及频率、带宽、时宽等 [5],在尽量提高系统性能的同时合理调配系统资源以提升系统效能是MIMO雷达资源分配研究的主要内容,其中阵元的合理布置和选取是资源分配的重要方面 [4]。
为了在确保系统性能的前提下尽量减少阵元的使用数量,很多学者展开这方面的研究,提出了各种算法。一是将阵元选取建模为背包问题(knapsack problem, KP),在预设定位精度要求下以最少阵元数量的选取达到最优定位精度,同时降低系统复杂度 [6];二是采用阵元聚类的方法,在给定位置估计精度下每个目标只由对应的阵元子集跟踪 [7];三是文献 [7] [8] 提出的贪婪多起点搜索(Greedy Multi-start Local Search, GMLS)算法和公平多起点搜索(Fair Multi-start Local Search, FMLS)算法。两种算法各有所长,GMLS算法计算复杂度较低,但不能保证最好的估计精度;FMLS算法跟踪精度很高,但计算量较大。以GMLS算法为基础,文献 [9] [10] 在文献 [8] 的基础上针对分布式MIMO雷达对目标快速跟踪的需求,提出了基于多目标位置跟踪的收发阵元选取算法,在指定的位置估计精度的约束下,建立了最少阵元选取的优化模型,在GMLS算法的基础上,提出了改进的GMLS (Modified GMLS, MGMLS)算法,使算法复杂度进一步降低。
上述研究均针对单目标或者平等对待待跟踪的多个目标,文献 [10] [11] 在研究了突出重点目标跟踪的阵元选取算法,将目标分为普通目标、可疑目标和危险目标,分别讨论了低跟踪精度要求场景和高跟踪精度两种场景,并分别提出了GFMLS (Greedy and Fair Multi-start Local Search, GFMLS)算法和单天线对多目标(One Antenna to All Targets, OAAT)算法。GFMLS算法具有数据处理简单的特点,适合处理低跟踪精度要求下不同优先级目标的阵元选取问题,OAAT算法接收数据量大,但可以实现更高的估计性能,有利于实现更高的任务需求。
而上述研究均局限于分布式MIMO雷达在执行单任务的情景,当系统执行多任务时,会带来新的资源分配问题。张浩为等在文献 [12] 中研究了分布式MIMO雷达在执行多个匀速运动目标跟踪和目标检测多任务下阵元、功率和带宽的分配问题,利用改进的粒子群算法进行阵元选取,能够在一定复杂度下确保系统的指标性能。但文献 [12] 在计算检测概率时仅考虑了待检测区域边缘,没有考虑到检测区域的每一个点;同时在建立目标函数时没有去除检测概率和定位误差两项不同指标的量纲,难以描述每个任务在多任务中的权重比例;且对跟踪的多个目标同等看待,没有考虑突出重点目标跟踪的情况。目前,分布式MIMO雷达在多任务下突出重点目标跟踪的资源分配还有待进一步研究。本文针对上述问题,综合考虑待检测区域内每一点的检测概率,将描述不同性能指标参数进行去量纲化、归一化处理,在给定的性能指标要求下,使选用的阵元数量尽量少,以此建立优化模型。提出了基于多任务下改进的贪婪多起点搜索算法(Modified Greedy Multi-start Local Search of Multitask,MT_MGMLS)的阵元选取模型及求解算法。仿真实验证明了本文所提算法的有效性。
2. 系统模型及重要性能参数
2.1. 系统模型
将分布式MIMO雷达系统模型限定在二维平面坐标系中,假定系统有M部发射阵元,N部接收阵元,发射阵元发射的信号为正交波形,第m部发射阵元的信号记为
,满足
,其中
为发射信号的持续时间,发射功率为
。
假设系统跟踪多个目标,数量为
个,对目标进行第一次观测记为初始时刻
,第k次观测对应时刻
。假设目标均为匀速运动,
时刻第q个目标的状态向量表示为
,其中
、
分别为目标的横坐标、纵坐标,
、
分别为目标x方向和y方向的速度值,同时记
、
分别为此时第m部发射阵元和第n部接收阵元与第q个目标的距离。
假设系统能够实现时间同步,第q个目标的低通等效信号 [13] 可以表示为:
(1)
式中,
表示第q个目标的复散射系数,
和
分别是
的实部和虚部;
表示自相关函数为
的高斯白噪声。
表示信号传播产生的衰减。
表示时延,
表示多普勒频移。
记
,
,定义向量
,向
量
的函数的观测向量
可表示为
(2)
式中,
为观测过程,
为观测的高斯噪声。
2.2. 目标定位误差的贝叶斯克拉美罗界
在信噪比较高时,用
估计
的均方误差与贝叶斯克拉美罗界(BCRLB,Bayesian Cramer-Rao Lower Bound )接近 [13]。
的贝叶斯信息矩阵(Bayesian Information Matrix, BIM)表示为
。定义
时刻发射和接收阵元的阵元选取变量分别为
,
,
,0表示该阵元被舍弃,1表示选择该阵元。目标跟踪的BCRLB矩阵可以表示为:
(3)
对角线元素即为待估计量
的各个状态分量估计方差的下界。故
时刻第q个目标的位置估计误差满足:
(4)
其中,
表示矩阵
的第i个对角元素,记
。
2.3. 检测概率
采用Neyman-Pearson准则推导检测概率的推导 [12] [14],忽略目标移动造成的多普勒效应。在高斯白噪声下,分布式MIMO雷达系统对监视范围内某一特定位置目标进行检测。在单脉冲条件下,最大似然比检测器是对每一条路径通道先作匹配滤波处理,再作平方律检波,最后将各通道的回波相加 [14]。设 为匹配滤波器的输出,因为有
为匹配滤波器的输出,因为有 个匹配滤波器的输出,故
个匹配滤波器的输出,故 为一
为一 向量。同时由于本文不涉及功率的分配,可以假定每个发射阵元的发射功率相等,即
向量。同时由于本文不涉及功率的分配,可以假定每个发射阵元的发射功率相等,即 。有:
。有:
 (5)
(5)
其中, 表示检测到目标和
表示检测到目标和 表示没有检测到目标,
表示没有检测到目标, ,
, ,
, 为信道衰减系数。从而有:
为信道衰减系数。从而有:
 (6)
(6)
设似然比检测门限为 ,虚警概率计为
,虚警概率计为 。则有:
。则有:
 (7)
(7)
由此可以推导出目标检测概率为:
 (8)
(8)
3. 阵元选取模型的建立与求解
文献 [8] 提出的GMLS算法通过随机选取一个初始阵元对,然后进行1轮启发式阵元选取,虽然计算量较小,但不能保证最好的估计精度。文献 [9] [10] 借鉴GMLS算法和FMLS算法提出了改进的GMLS (Modified GMLS, MGMLS)算法,既保证了跟踪性能又使算法复杂度进一步降低。本文借鉴MGMLS算法,提出了基于MT_MGMLS的阵元选取模型及求解算法。
3.1. 优化模型的建立
在保证系统性能的前提下尽量减少阵元数量,以最少的阵元集合为目标函数建立优化模型。系统的性能要求和资源限制给定了约束条件,限定阵元总量,给出阵元使用最大使用率,给定系统的跟踪性能和检测性能要求。建立的优化模型如下:
 (9)
(9)
式中,目标函数为最小阵元集,目标q的位置估计误差不大于系统能容许的最大位置估计误差 ,检测概率不小于系统容许的最小检测概率
,检测概率不小于系统容许的最小检测概率 ,阵元使用总量不超过系统容许的最大阵元使用率
,阵元使用总量不超过系统容许的最大阵元使用率 ,发射阵元数量不超过M,接收阵元数量不超过N。
,发射阵元数量不超过M,接收阵元数量不超过N。
3.2. 系统参数预处理
3.2.1. 目标位置估计误差归一化
由于系统要同时考虑的检测概率 和目标位置估计误差
和目标位置估计误差 量纲不同、取值范围不同,两者不能直接用于比较,难以统一处理。故此将
量纲不同、取值范围不同,两者不能直接用于比较,难以统一处理。故此将 进行归于处理。具体步骤如下:
进行归于处理。具体步骤如下:
Step1:引入 可能达到的最大值,记为
可能达到的最大值,记为 ;
;
Step2:用 除以
除以 ,将位置估计误差的范围转换为
,将位置估计误差的范围转换为 ;
;
Step3:将经过上述处理后的位置估计误差先后进行乘以−1和加1处理。
通过上述三个步骤即可实现目标位置估计误差 的去量纲化和归一化处理,将处理过后的
的去量纲化和归一化处理,将处理过后的 记为
记为 。之所以进行step3,是因为经过该步骤处理后,
。之所以进行step3,是因为经过该步骤处理后, 取值越大代表性能越好,
取值越大代表性能越好, 取值越小代表性能越差,便能与检测概率
取值越小代表性能越差,便能与检测概率 一致。
一致。
3.2.2. 目标重要度权重系数引入
系统需要同时跟踪多个目标,不同目标的跟踪精度要求不同,为了区分不同目标的重要程度,在此引入表示目标重要程度的权重系数。将第q个目标的权重系数记为 ,
, 应该满足以下两点条件:
应该满足以下两点条件:
1. 与目标的跟踪精度要求成反比,即
与目标的跟踪精度要求成反比,即 ,
, 为比例系数;
为比例系数;
2. 所有 之和为1。
之和为1。
通过以上两点便可确定各个目标的权重系数,必要时还可进一步引入人为干扰因子对权重系数进行调整,以进一步突出重点目标。
3.2.3. 任务重要程度的权重系数引入
本文考虑分布式MIMO雷达系统同时执行目标检测和目标跟踪任务的情况,需要引入表征目标重要程度的权重系数。通过前面的参数处理,使得可以在同一框架内处理表征系统跟踪性能的目标位置估计误差和表征检测性能的检测概率。引入表征目标检测和目标跟踪重要程度的权重系数分别为 和
和 。
。
进一步将检测性能和跟踪性能综合考虑,引入表征系统整体性能的参数。假设 时刻系统对第q个目标的跟踪精度误差为
时刻系统对第q个目标的跟踪精度误差为 ,经归一化处理后为
,经归一化处理后为 ;对于第q个目标系统能容许的最大位置估计误差
;对于第q个目标系统能容许的最大位置估计误差 归一化处理后为
归一化处理后为 。系统对特定目标的检测概率为
。系统对特定目标的检测概率为 ,
, 是系统容许的最小检测概率。以测试值相对系统要求的绝对变化量表征系统的综合性能:
是系统容许的最小检测概率。以测试值相对系统要求的绝对变化量表征系统的综合性能:
 (10)
(10)
当 时,系统同样对待跟踪性能和检测性能;当
时,系统同样对待跟踪性能和检测性能;当 时,系统更加侧重于跟踪性能;当
时,系统更加侧重于跟踪性能;当 时,系统更加侧重于检测性能。当
时,系统更加侧重于检测性能。当 时表示系统性能正好达到性能要求;当
时表示系统性能正好达到性能要求;当 时表示系统性能劣于性能要求,且
时表示系统性能劣于性能要求,且 越小性能越差;当
越小性能越差;当 时表示系统性能优于性能要求,且
时表示系统性能优于性能要求,且 越大性能越好。
越大性能越好。
经过参数预处理后,优化模型可重新表述为:
 (11)
(11)
式中, 和
和 分别为
分别为 和
和 归一化处理后的值;
归一化处理后的值; 为表示系统综合性能的参数,应确保其不低于系统性能要求。
为表示系统综合性能的参数,应确保其不低于系统性能要求。
3.3. 模型的求解
此处假定系统跟踪的目标分为重点目标和普通目标两种,MT_MGMLS算法的具体步骤如下:
Step1:给定阵元集全集 。选定初始阵元对作为初始阵元集,
。选定初始阵元对作为初始阵元集, ,其中
,其中 表示第i个发射阵元,
表示第i个发射阵元, ,
, 表示第j个接收阵元,
表示第j个接收阵元, 。剩余阵元的集合为
。剩余阵元的集合为 。
。
Step2:依据阵元集 计算对不同特定目标的跟踪性能和检测性能,得到每个目标的跟踪精度误差和检测概率,并由式(10)计算系统综合性能,记为
计算对不同特定目标的跟踪性能和检测性能,得到每个目标的跟踪精度误差和检测概率,并由式(10)计算系统综合性能,记为 。重复步骤1,遍历所有的初始阵元对,得到能够使系统综合性能达到最优的初始阵元对
。重复步骤1,遍历所有的初始阵元对,得到能够使系统综合性能达到最优的初始阵元对 。则剩余阵元的集合为
。则剩余阵元的集合为 。
。
Step3:若重点目标的跟踪精度得到满足转步骤8,否则转步骤4。
Step4:依据阵元集 ,并由式(10)计算系统综合性能,记为
,并由式(10)计算系统综合性能,记为 。
。
Step5:在阵元集 中选取1个阵元
中选取1个阵元 加入到阵元集
加入到阵元集 中,并更新
中,并更新 和
和 ,即
,即 ,
, 。根据更新后的
。根据更新后的 计算系统的综合性能,记为
计算系统的综合性能,记为 ,并计算
,并计算 。随后在
。随后在 去掉阵元
去掉阵元 ,再次更新
,再次更新 和
和 ,
, ,
, 。
。
Step6:重复步骤5,遍历集合B中的每一个阵元,得到使 取得最大值的阵元
取得最大值的阵元 ,将阵元
,将阵元 加入到集
加入到集 中,并更新
中,并更新 和
和 ,即
,即 ,
, 。
。
Step7:重复步骤4至步骤6,直到重点目标的跟踪性能得到满足或者 中阵元是数量达到系统容许的最大阵元使用率。若
中阵元是数量达到系统容许的最大阵元使用率。若 中阵元数量达到系统容许的最大阵元使用率,转步骤13,否则转步骤8。
中阵元数量达到系统容许的最大阵元使用率,转步骤13,否则转步骤8。
Step8:依据阵元集 计算对不同特定目标的跟踪性能和检测性能,得到每个目标的跟踪精度误差和检测概率。若系统性能达到要求,步骤13,若系统性能不能达到要求转步骤9。
计算对不同特定目标的跟踪性能和检测性能,得到每个目标的跟踪精度误差和检测概率。若系统性能达到要求,步骤13,若系统性能不能达到要求转步骤9。
Step9:依据阵元集 ,忽略掉重点目标并由式(10)计算系统综合性能,记为
,忽略掉重点目标并由式(10)计算系统综合性能,记为 。
。
Step10:在阵元集 中选取1个阵元
中选取1个阵元 加入到阵元集
加入到阵元集 中,并更新
中,并更新 和
和 ,即
,即 ,
, 。根据更新后的
。根据更新后的 忽略掉重点目标并计算系统的综合性能,记为
忽略掉重点目标并计算系统的综合性能,记为 ,并计算
,并计算 。随后在
。随后在 去掉阵元
去掉阵元 ,再次更新
,再次更新 和
和 ,
, ,
, 。
。
Step11:重复步骤9,遍历集合B中的每一个阵元,得到使 取得最大值的阵元
取得最大值的阵元 ,将阵元
,将阵元 加入到集
加入到集 中,并更新
中,并更新 和
和 ,即
,即 ,
, 。
。
Step12:重复步骤8至步骤10,直到系统性能得到满足或者 中阵元是数量达到系统容许的最大阵元使用率。
中阵元是数量达到系统容许的最大阵元使用率。
Step13:通过步骤1至步骤12,得到的阵元集合 即为最终的阵元集。
即为最终的阵元集。
3.4. 复杂度分析
使用穷举法进行阵元选取能够达到全局最优解,需要进行 次阵元选取。而本文提出的MT_MGMLS算法,在理论上最多需要进行
次阵元选取。而本文提出的MT_MGMLS算法,在理论上最多需要进行 次阵元选取。
次阵元选取。
4. 仿真实验与分析
在二维笛卡尔坐标系内,设分布式MIMO雷达的发射阵元数 ,接收阵元数
,接收阵元数 ,阵元形成圆形雷达阵,分布在
,阵元形成圆形雷达阵,分布在 的范围内,雷达使用使用率
的范围内,雷达使用使用率 。系统跟踪的目标的数量为
。系统跟踪的目标的数量为 ,分别从不同初始位置以60 m/s的速度沿不同方向匀速运动。以其中一个目标为重点目标,位置估计精度要求为
,分别从不同初始位置以60 m/s的速度沿不同方向匀速运动。以其中一个目标为重点目标,位置估计精度要求为 ,其余两个目标为普通目标,位置估计精度要求为
,其余两个目标为普通目标,位置估计精度要求为 。加入人为干扰因子后,重点目标的权重系数为
。加入人为干扰因子后,重点目标的权重系数为 ,普通目标的权重系数为
,普通目标的权重系数为 。
。
以时间间隔 进行12次观测,得到12帧跟踪数据。每部雷达用于跟踪任务和检测任务的发射功率均为
进行12次观测,得到12帧跟踪数据。每部雷达用于跟踪任务和检测任务的发射功率均为 ,有效时宽为10 μs,信号有效带宽为1.5 MHz,脉冲重复频率为
,有效时宽为10 μs,信号有效带宽为1.5 MHz,脉冲重复频率为 ,信号波长设为0.3 m。假设目标对各个方向的m雷达散射截面积相同,散射系数均为0.9。并假设待检测目标可能出现在监视区域内的任意位置,系统的检测概率门限
,信号波长设为0.3 m。假设目标对各个方向的m雷达散射截面积相同,散射系数均为0.9。并假设待检测目标可能出现在监视区域内的任意位置,系统的检测概率门限 。此次仿真中,系统平等看待检测任务和跟踪任务,故取表征任务重要程度的权重系数
。此次仿真中,系统平等看待检测任务和跟踪任务,故取表征任务重要程度的权重系数 。为保证结果的准确性,实验采用
。为保证结果的准确性,实验采用 次蒙特卡洛结果的平均值。
次蒙特卡洛结果的平均值。
图1给出了雷达与目标的空间位置关系及目标的运动轨迹。
为了验证本文算法的有效性,此处将MT_MGMLS算法与其他算法进行比较。一是,利用MT_MGMLS算法得到阵元数量后,与利用相同阵元数量的穷举法得到的最优定位精度误差和检测概率进行比较,将此处的穷举法称为固定阵元数量穷举法;二是与利用相同的阵元数量随机选取发射和接收阵元方法得到的定位精度误差和检测概率进行比较,将此种方法称为随机算法。图2~图5分别给出了三种算法在检测概率和三个跟踪目标定位误差单方面的性能对比。从图中可以看到,随机算法无法满足系统性能要求, 无法满足系统的检测性能要求,也不能满足重点目标的跟踪精度要求,不区分地对待三个跟踪目标;MT_MGMLS算法同样在各方面性能上均和固定阵元数量穷举法接近,两者均能满足系统性能要求,突出对重点目标的跟踪。
下面进行系统综合性能分析。图6给出了三种算法的综合性能对比图,可以看到MT_MGMLS算法的综合性能优于随机法,与固定阵元数量穷举法接近。但MT_MGMLS在计算复杂度上更有优势。图7是计算复杂对对比,从图中可以看出,相对于固定阵元数量穷举法,MT_MGMLS算法在系统计算量上能得到大幅降低。进一步对图7中数据进行分析可知,相对于固定阵元数量穷举法,MT_MGMLS算法在计算复杂度上在不同帧降幅均达到95%以上。

Figure 1. Spatial position relation between radar and target and target's motion trajectory
图1. 雷达与目标的空间位置关系及目标的运动轨迹

Figure 2. Comparison of detection probability
图2. 检测概率对比

Figure 3. Comparison of position estimation error of target 1
图3. 目标1位置估计误差对比

Figure 4. Comparison of position estimation error of target 2
图4. 目标2位置估计误差对比

Figure 5. Comparison of position estimation error of target 3
图5. 目标3位置估计误差对比
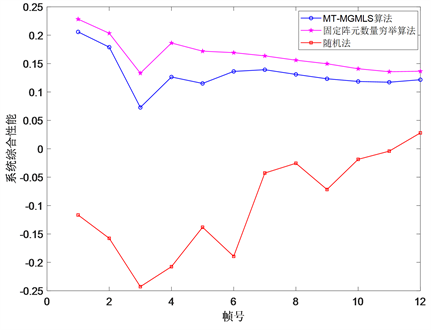
Figure 6. Comparison of comprehensive performance
图6. 综合性能对比图

Figure 7. Comparison of computational complexity
图7. 计算复杂度对比
5. 结论
本文研究了多目标跟踪和目标检测多任务下的分布式MIMO雷达的阵元选取问题,且不同目标具有不同的跟踪精度误差。为了突出对重点目标的跟踪并兼顾系统的综合性能,本文提出了基于MT_MGMLS的阵元选取模型及求解算法,通过仿真实验,所提算法能够满足系统性能要求,优于随机算法,且相对于固定阵元数量穷举法在计算复杂度上有了大幅下降。但本文在考虑系统资源时仅着重考虑了阵元因素而且没有考虑多资源因素的情况,多资源因素下检测和跟踪多任务同时考虑是下一步需要研究的方向。
NOTES
*通讯作者。