1. 引言
超声电机是一种新型的驱动器,因其结构简单、扭矩大、响应速度快、断电自锁和易于小型化的特点而受到研究人员的广泛研究 [1] [2] [3]。随着压电材料的发展,多种基于压电效应的电机取得了新的进展 [4] [5],尤其在MEMS技术的驱动下,电机的微型化进程十分迅速 [6] [7] [8],其中大部分电机都采用了行波驱动技术,此类新型电机被称为微型行波超声电机(MUSM),它是通过逆压电效应使定子上的点进行椭圆运动,从而在表面形成周向的行波,然后通过摩擦将机械振动转换为转子的旋转 [9],相比于微型电磁电机,它具有能量密度高、转矩高、结构简单、断电自锁等优势,在微型电机领域中,MUSM拥有相当不错的前景。
定子作为MUSM的核心构件,其结构决定了能否激发出行波来驱动转子 [10] [11],定子结构通常由振动结构与固定结构两部分组成如图1所示,其振动结构一般是圆盘形或者环形,用于产生周向行波;MUSM作为一种MEMS谐振器件,定子必须由一个或多个支撑梁作为固定结构将其与基底悬空连接,这些支撑梁即为“锚”,而锚的引入也会引起MUSM定子的模态失配,导致定子上无法形成驱动转子所需要的稳定行波 [12] [13],因此本文分析了引起频率失配的因素,并提出了该问题的解决方案。
2. 超声电机工作原理
行波型超声电机是利用压电材料的逆压电效应将输入的电能转化为机械能的新型电机,当与电机定子共振频率接近的外部电压激励施加到由压电陶瓷与弹性体构成的电机定子上时,电机定子通过逆压电效应激发出与外部激励频率相近的振动模态,形成驻波。当存在两列振幅与频率相等,而在时间和空间上都相差四分之一相位的驻波如式(1)中wA与wB,则能叠加形成一列行波w,行波依靠定子与转子之间的摩擦力驱动转子,使得转子转动 [14]。
 (1)
(1)
其中A代表振幅,ω代表角频率,t代表时间,n代表波数,θ代表角位移。可看出,两驻波模态匹配度对行波的合成至关重要:若是两驻波振幅不相等,则合成的结果为一列行波加上一列驻波;若是频率不相等,则无法合成行波。因此,在超声电机的定子结构必须能激发出两相互匹配的正交模态,此模态通常用Bmn来表示,m代表该模态下的节圆数,n代表该模态下的节径数。定子是否能激发出正交模态与定子结构息息相关,因此MUSM定子结构的设计至关重要。
MUSM的电极布局方式是限制定子结构的一大难题,Randy等人设计的盘型定子采用中心引线的方式,将所有压电陶瓷的电极导线从盘型定子中心引出,如图2所示,同时将导线作为转子的转轴,限制转子的平移 [9]。

Figure 2. MUSM prototype made by Randy
图2. Randy等人设计的MUSM
然而,这种设计方式存在弊端,以导线作为转轴的方式使得转轴与转子之间的间隙较大,使得转子晃动明显,而且在长期的运行下导线也容易损坏。相比起盘型定子结构,环形定子结构在定子中心预留了转轴的位置,引线也可通过环形定子外圈的支撑梁引出,Randy等人改进后的环形定子如图3所示,该定子四周由六个折叠梁将定子圆环与基地连接,实现定子的悬空固定,同时折叠梁结构的引入也减少了锚点的能量损耗。然而,这种设计方式同样存在缺陷,支撑梁的引入会引起定子的模态失配。本文将以此模型为例,分析支撑梁引起模态失配的原因。
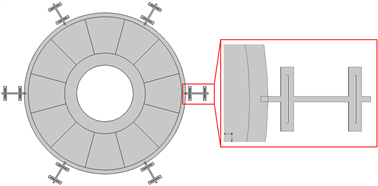
Figure 3. Ring stator structure with folding beam
图3. 折叠梁支撑环形定子结构
3. 环形定子结构模态匹配分析
支撑梁的引入解决了电机定子的布线问题以及固定问题,然而,支撑梁同时会导致超声电机工作的两个正交模态频率与幅值不匹配。为验证支撑梁的影响因素,本文建立模型进行频率仿真分析。通常应用MEMS制造技术制造的MUSM定子使用硅基底作为弹性体,依次溅射下层金属、压电陶瓷材料、上层金属等,而金属层实际极薄,对模态分析的结果影响极小,可忽略。因此本文建立的模型主要由硅基底与压电材料PZT4组成,定子尺寸如表1所示,支撑梁尺寸参数如图4所示,其中梁的宽度作为分析的变量并未在图中标出,材料参数如表2所示。

Table 1. Structural size parameters of the model
表1. 模型尺寸参数

Figure 4. Structural size parameters of the model
图4. 支撑梁尺寸参数(um)
Table 2. Material parameters of the model
表2. 模型材料参数
同时引入一个频率不匹配度参数c作为正交模态频率差距的指标:
 (2)
(2)
该定子的工作模态为B03模态,为验证支撑梁对模态匹配的影响,通过改变折叠梁的梁宽度的方式进行仿真分析,得到定子两正交模态的不匹配度对比如图5所示。

Figure 5. Mismatch in different beam widths
图5. 不同梁宽下的频率不匹配度

Figure 6. Orthogonal modes with the beam width of 35 mm
图6. 梁宽为35 um正交模态
可看出,随梁宽增加,梁刚度增加,两正交模态的频率不匹配度增加,不利于行波的形成。梁宽为35 um时的正交模态如图6所示,两正交模态其中一模态下梁的振动几乎为零,而另一模态的支撑梁有较大振幅,整个系统的能量在支撑梁上损失。多次改变梁宽,梁振动为零的模态频率相近,因此可以看作是随着梁刚度的提高,梁将影响另一模态下的整体结构刚度,导致频率上升。
根据以上分析,为抑制频率的不匹配度,应适当减小支撑梁宽度。然而减小支撑梁宽度会引起定子承载能力下降,对电机定子进行承载稳态分析,对定子表面施加载荷,应力云图如图7所示,可得到不同支撑梁宽度下支撑梁所受最大应力变化如图8所示,随着梁宽度的减小,梁受到的最大应力增大,承载能力因此减弱。
4. 改进定子结构
从上一节的模态匹配问题中可以看出,两正交模态的频率差距过大的主要原因在于在两正交模态下支撑梁的振动情况不一致。当梁振幅较小时,模态频率较低,支撑梁几乎不对定子振动产生影响,而当梁振动较大时,定子的振动频率显著增大。因此,为保证两模态的频率匹配程度必须要保证梁的振动情况一致。为此,增加支撑梁的个数,使梁在两正交模态下振动情况相同,梁宽选择35 um,新定子结构如图9所示。
该结构在B03模态下两正交模态如图10所示,谐振频率分别为f1 = 40.78 kHz,f2 = 40.796 kHz,振幅如图11所示,两正交频率振幅相对比如所示。两正交模态下振幅相差较小且两正交模态频率相近,两模态下支撑梁振动情况相同,即两模态受损情况一致。
十二梁结构频率不匹配度为c = 0.00039,远低于六梁结构的频率不匹配度。与六梁结构相对比,十二梁结构B03模态谐振频率与六梁结构频率较高模态频率相近。对比两结构模态变化,模态驻波的波峰位置由锚点位置变为相邻锚点位置中间,模态受损情况由单一模态受损变为两正交模态受损情况一致,因此频率出现较高的一致性。

Figure 7. Stress distribution of the beam
图7. 梁宽为35 um时受应力状态

Figure 8. Maximum stress in different beam widths
图8. 支撑梁所受最大应力情况
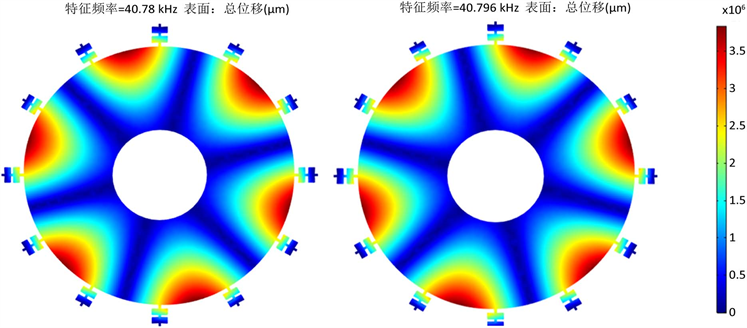
Figure 10. B03 orthogonal modes of improved stator structure
图10. 多折叠梁结构B03模态两正交模态
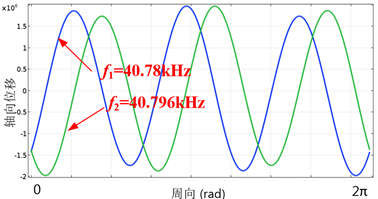
Figure 11. Amplitude comparison of B03 orthogonal modes
图11. B03模态两正交模态振幅对比
之所以使得两模态匹配度增加是因为模态下每隔π/2 (正交)都由相同的支撑状态。因此当节径数n与支撑梁个数k满足关系:k = 4*n时,两正交模态具有较高的一致性,频率匹配情况良好。
5. 结论
本文通过定子周边支撑的微型超声电机定子进行模态仿真,判断出该固定方式引起正交模态频率失配的原因是支撑梁刚度提高使其中一模态下定子整体的刚度提高,模态损失,使得该模态振动频率提高,而与之正交的模态下支撑梁振动几乎为零,整体刚度与不引入支撑梁时相比几乎不变,导致这两正交模态频率差巨大,频率失配。在此基础上,增加支撑梁的个数使得支撑梁个数等于节径的四倍时能实现两正交模态下支撑梁振动情况一致,在降低定子振动能量的情况下实现频率匹配。