1. 引言
随着电力电子装置的广泛应用,各类非线性负载产生的谐波和无功电流对电网的影响日益严重。在各类有源电力滤波器中,并联型有源电力滤波器能够有效地补偿电流源型非线性负载产生的无功和谐波电流,已被广泛研究并有相应产品问世。而并联型有源电力滤波器的性能在很大程度上取决于有源电力滤波器电流指令信号获取的速度和精度以及逆变器输出电流的控制策略 [1] [2]。
滑模变结构控制对系统内摄动和外干扰具有完全鲁棒性,即系统的运动与摄动以及干扰无关。由于滑模变结构控制具有快速性、鲁棒性、稳定性好和对外界的干扰不敏感等特点从而使其适合于有源电力滤波器的控制,但是滑模变结构对系统的参数摄动和外部干扰的不变性是以控制量的高频抖振换取的 [3] [4]。文献 [5] 设计了准滑模变结构控制,选取积分滑模函数,边界层外采用正常的滑模变结构控制,边界内为连续状态反馈控制从而有效的降低了抖振。文献 [6] [7] [8] 采用积分滑模变结构控制也降低了抖振。文献 [9] [10] [11] [12] 采用智能控制方法和滑模控制相结合的方式,有效的降低了抖振,但是智能控制方法本身实时性不够理想,和滑模控制方法结合难免造成了一定的延时。
本文对应用最多的三相三线制并联有源滤波器展开讨论,在时域分析的基础上,建立了αβ坐标系下的数学模型,设计了指数型快速终端滑模控制器,将该方法应用到并联有源滤波器的补偿电流跟踪控制中,通过仿真与一般滑模控制方法比较,结果表明该控制方法具有更好的稳态性能和动态性能。
2. APF数学模型
三相并联型有源电力滤波器原理如图1所示 [1]。
图1中,Usa、Usb、Usc为三相电源电压;isa、isb、isc为三相电网电流;iLa、iLb、iLc为三相负载电流;ica、icb、icc为APF输出的补偿电流;Ua、Ub、Uc为主电路各桥臂中点与电源中点之间电压;Udc为直流侧电压;C为直流侧电容;L为APF交流侧进线电感;R为进线电感等效电阻。
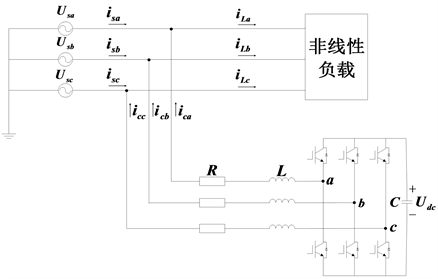
Figure 1. Schematic diagram of three-phase shunt active power filter
图1. 三相并联有源电力滤波器原理图
根据图1可以列出APF的电路方程:
(1)
假设逆变器每相上桥臂导通记为:
,下桥臂导通记为:
,则有:
(2)
设系统a、b、c三相控制量分别为Va、Vb、Vc,则:
 (3)
(3)
abc坐标系与αβ坐标系之间的变换矩阵为:
(4)
将式(2)、(3)、(4)代入式(1)中得:
(5)
设系统状态变量为:
(6)
其中
、
是αβ坐标系下的指令补偿电流,iα、iβ是实际补偿电流 [13] [14]。
将式(6)代入式(5)中得:
(7)
令
(8)
将式(8)代入式(7)中得:
(9)
3. 指数型快速终端滑模控制器设计
滑动模态超曲面的选择是滑模变结构控制系统设计的首要问题,它包含了滑动面的存在性问题和可达性问题。线性滑动模态超曲面可以较容易地实现变结构系统渐进稳定的动态特性,但是不能保证状态变量在有限时间内到达平衡点 [15] [16]。针对这一问题,本文将指数型快速终端滑模控制方法应用到并联有源滤波器中,该方法不仅能降低抖振,而且在保持系统原有动态性能的基础上进一步提高了收敛速度。
选择指数型非线性滑动模态超曲面为:
(10)
也可以将上式简化为:
(11)
其中x为状态变量,
,
均为常数,p、q为正奇数且
,
。
设计控制率使系统全局渐近稳定,并能使系统的状态变量在有限时间内快速收敛到平衡点,现给出控制率为:
(12)
其中
,S1、S2分别为α、β相的指数型快速终端滑模函数。
现证明系统可达性,以α相为例,当系统可达时应有:
(13)
(14)
将式(9)、(12)代入式(14)得:
(15)
将式(15)代入式(13)可得:
 (16)
(16)
其中p、q为正奇数,所以p + q为偶数 [3]。
选择参数α、β、k、p、q、ε、λ通过式(12)计算出控制变量Vα、Vβ,再利用空间矢量调制法转换为变流器所需要的PWM信号,系统整体控制框图如图2所示 [17]。
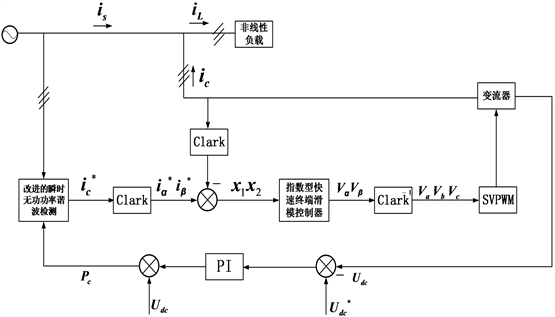
Figure 2. Overall control block diagram of the system
图2. 系统整体控制框图
4. 仿真分析
本文采用Matlab/Simulink仿真软件,主电路图如图1所示,谐波检测环节采用改进的瞬时无功功率方法,电流跟踪控制方法分别是一般滑模控制和指数型快速终端滑模控制方法,电压外环采用PI控制 [18]。电网电压有效值220 V,负载是三相不可控整流接电阻和电感,负载电阻10 Ω,电感1 mH,APF进线电感1 mH,等效电阻0.1 Ω,直流侧电容电压1000 V,开关频率10 kHz,控制参数α = 2,β = 1,p = 9,q = 7,k = 0.5,ε = 10,λ = 10。通过比较一般滑模控制和指数型快速终端滑模控制这二种方法,分析其稳态性能和动态性能。
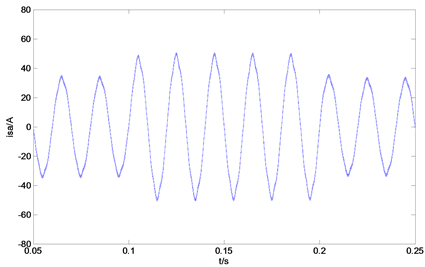
图3为A相负载电流波形和频谱图,从图中可以看出负载中含有谐波成分,电流畸变严重,总的谐波畸变率(THD)为25.04%,其中3次、5次为主要的特征次谐波。图4为一般滑模控制和指数型快速终端滑模控制两种方法补偿后的电网电流,可以看出两种方法均能实现补偿谐波电流的功能,一般滑模控制方法在波峰和波谷处有明显的抖振,指数型快速终端滑模控制方法有效的降低了抖振,补偿后的电网电流波形正弦度较高。
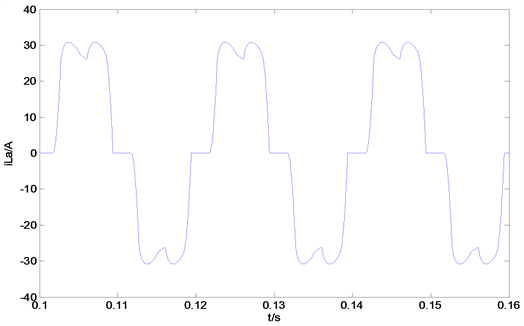 (a) A相负载电流波形
(a) A相负载电流波形 (b) A相负载电流频谱
(b) A相负载电流频谱
Figure 3. A-phase load current waveform and spectrum waveform
图3. A相负载电流波形与频谱图
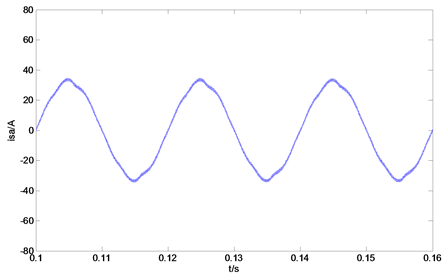 (a) 一般滑模控制A相电网电流波形
(a) 一般滑模控制A相电网电流波形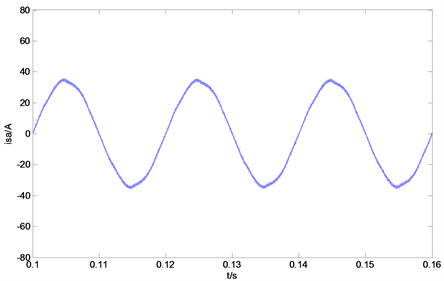 (b) 指数型快速终端滑模控制A相电网电流波形
(b) 指数型快速终端滑模控制A相电网电流波形
Figure 4. Two control methods for current waveform of A-phase power network
图4. 两种控制方法A相电网电流波形
图5为一般滑模控制和指数型快速终端滑模控制两种方法的a相指令补偿电流放大对比图,从两图中对比可以看出指数型快速终端滑模控制方法下的指令补偿电流偏离滑模面更小,系统更快速地收敛到平衡点。
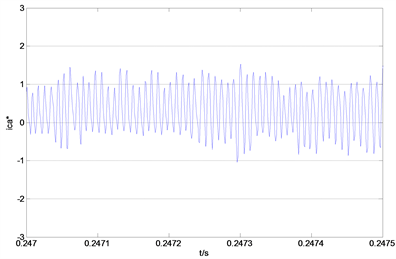 (a) 一般滑模控制A相指令补偿电流波形
(a) 一般滑模控制A相指令补偿电流波形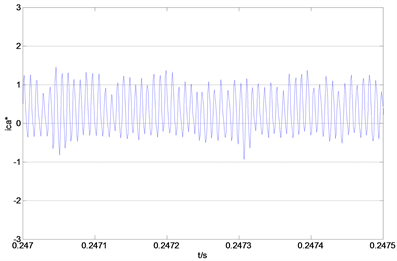 (b) 指数型快速终端滑模控制A相指令补偿电流波形
(b) 指数型快速终端滑模控制A相指令补偿电流波形
Figure 5. Comparison of current waveform between two control methods
图5. 两种控制方法电网电流波形对比
图6为一般滑模控制和指数型快速终端滑模控制两种方法补偿后的电网电流频谱图,一般滑模控制下的THD为3.71%,指数型快速终端滑模控制下的THD为2.9%,两种控制方法均能达到国标要求,可以看出指数型快速终端滑模控制补偿效果更好,有效降低了抖振,谐波含量更少。
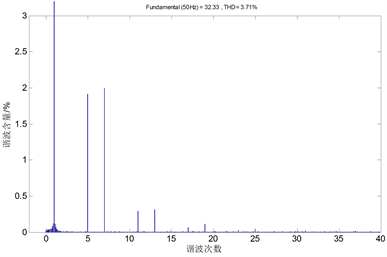 (a) 一般滑模控制A相电网电流频谱图
(a) 一般滑模控制A相电网电流频谱图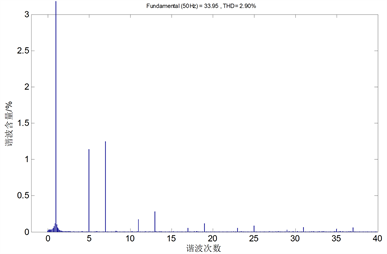 (b) 指数型快速终端滑模控制A相电网电流频谱图
(b) 指数型快速终端滑模控制A相电网电流频谱图
Figure 6. Contrast of current spectrum of A-phase power supply controlled by two methods
图6. 两种方法控制A相电源电流频谱对比
如图7所示,在0.1秒时不可控整流负载侧投入一个20 Ω的电阻与原来负载并联,在0.2秒时再把并联的电阻切除,查看两种控制方法在负载突变时的情况。两种控制方法均能实现对负载电流的快速跟踪,体现了很好的鲁棒性,指数型快速终端滑模控制正弦度较高。
 (a) 一般滑模控制A相电网电流波形
(a) 一般滑模控制A相电网电流波形 (b) 指数型快速终端滑模控制A相电网电流波形
(b) 指数型快速终端滑模控制A相电网电流波形
Figure 7. Current waveform comparison of two control methods in phase A power network under abrupt load change
图7. 两种控制方法在负载突变下A相电网电流波形对比
5. 结论
本文基于三相三线制并联有源滤波器提出了一种指数型快速终端滑模变结构控制方法。现结论如下:
1) 建立了该系统的数学模型,针对系统强耦合、非线性的特点,通过坐标变换将系统解耦,采用改进的瞬时无功功率的方法检测谐波电流。
2) 然后针对滑模控制的抖振问题,设计了指数型非线性滑动模态超曲面和控制率,证明了滑模控制的可达性。
3) 与目前普遍采用的控制方法相比较,该控制策略能够实现系统的全局渐近稳定性,并能使系统的状态变量在有限时间内快速收敛到平衡点。
4) 通过与一般滑模控制方法对比,该控制方法下的谐波含量减少了0.8%,也验证了本文提出的指数型快速终端滑模控制方法的可行性和有效性。