1. 引言
日益严重的环境污染和能源消耗问题使人们迫切需要新能源。燃料电池(FC)是一种有前途的分布式电源。它具有高效率、低污染的优点,但缺点是动态性能差、使用寿命短 [1] [2]。锂电池(B)能够提供一种管理电气系统(如不间断和便携式电源、可再生能源发电系统和混合动力汽车)。锂电池具有充放电速度快、储能时间长的特点。本文提出了一种以质子交换膜燃料电池为主电源、锂电池为辅助电源(FC + B)的混合动力系统。
电动汽车(EV)的负载是可变的,对不稳定的交通状况,包括频繁的加速、减速,上坡或下坡行驶进行响应。因此,能源管理策略必须能够在负载功率需求变化剧烈时,使得动力系统中氢燃料电池和锂电池合理分配输出功率。
具有反馈控制的DC/DC变换器已广泛用于混合动力车辆。但当前电动车用氢燃料电池混合动力系统在结构设计与能量管理控制方面仍有待深入研究。氢燃料电池特殊的输出特性,对其级联DC/DC变换器提出了与传统电力电源相比更为严格的要求。所以研究和选择适合氢燃料电池级联DC/DC变换器的拓扑结构,对提高电动汽车混合动力系统的燃料利用效率,延长燃料电池的寿命以及提高整个系统的安全性和经济性都有重要的意义。
通过对氢燃料电池车混合动力系统的建模和仿真分析,不仅可以准确的描述该动力系统的特性及行为,而且可以在设计的各阶段对系统的运行参数进行优化调整。因此,本文基于simulink对氢燃料电池车混合系统进行仿真模型搭建以及动态分析。
2. 氢燃料电池车混合动力系统结构及控制
2.1. 氢燃料电池
氢燃料电池采用质子交换膜燃料电池。H2和O2在阳极室和阴极室中分别发生氧化反应和还原反应。氧化反应产生了H+和e−,质子交换膜将H+传送到阴极,而e−由外部电路传送到阴极 [3]。当外部电路连通时,自由移动的e−便可以形成电流,从而向外部电路供电。本文采用MATLAB/Simulink自带的燃料电池模型,其相关参数设置依照H-300质子交换膜燃料技术手册。
在电动汽车应用氢燃料电池时,其体积和重量都十分受限。由matlab得出氢燃料电池输出特性曲线如下图1所示,可以看出当负载功率需求增加时,氢燃料电池输出电压下降较大。在负载功率波动较大时,负载端电压也会出现较大波动。且氢燃料电池不能承受反向电流,会降低能源利用效率。故而尽管氢燃料电池供电优点很多,仅依靠这一动力源无法满足负载需求。因此,本文紧密结合氢燃料电池输出特性,采用DC/DC变换器与氢燃料电池级联的形式,解决上述问题,重点研究混合动力系统的设计。

Figure 1. Hydrogen fuel cell output characteristic curve based on H-300 proton exchange membrane fuel cell parameters
图1. 基于H-300质子交换膜燃料电池参数的氢燃料电池输出特性曲线
2.2. DC/DC变换器
当氢燃料电池直接与负载相连,若负载发生剧烈波动,燃料电池不正常的动态响应会使得整个系统的有效能量管理无法实现。为此,在氢燃料电池与负载之间需要加入DC/DC变换器。一般来说,DC/DC变换器有Buck、Boost及其衍生的多种形式。单相Buck电路存在着其固有的电流断续区间(即不能为负载连续供电),会增加输出电流的纹波,降低系统效率。且此时每个MOSFET的电流应力较大,影响其使用寿命 [4]。为此,本文采用两相交错并联的DC/DC变换器,当某相截止时,另一相处于工作状态,即两条支路之间的触发脉冲相差180˚。MOSFET的触发有其专门的触发电路,通过该触发电路可以设定其占空比。
2.3. 直流电机负载
直流电机负载是随时间变化的感性负载,为了能够直观比较负载所需功率及系统供给功率的关系,将直流电机负载简化为受电流源控制负载,并分别设置不同时刻模拟加速来表示峰值功率的需求。
2.4. 动力系统辅助电源
动力系统采用“FC + B”的驱动模式,因此本文辅助电源采取锂电池组,其具有动态响应快,储能时间长等特点。当系统负载突变时锂电池可以快速响应满足系统的要求,从而弥补氢燃料电池在动态响应方面慢的不足。
2.5. 峰值电流模式PWM控制技术
本文DC/DC变换器采用的控制技术为峰值电流模式控制。控制模式相当于双闭环控制。它是脉冲宽度调制(PWM)DC/DC变换器中非常常规的控制技术,具有响应速度快,精度高和过载保护的特点。峰值电流模式控制通过变换器的电感电流与负载电压做比较并作用于驱动器上以控制开关管的开通与关断,达到控制占空比的目的,其工作原理图为图2所示。开关管的开通由时钟信号控制,时钟信号每隔一段时间使RS锁存器置位,Q = 1开关开通,则电感电流上升直到给定值使比较器输出信号翻转,则RS锁存器复位Q = 0。

Figure 2. Peak current mode control schematic
图2. 峰值电流模式控制原理图
峰值电流模式控制有着暂态闭环响应较快、对输入电压的变化和输出负载的变化瞬态响应较快、控制环易于设计、瞬时峰值电流限流和自动均流并联等优点。但其开环不稳定,当占空比大于0.5时峰值电感电流可能会使系统出现次谐波振荡 [4] [5] [6]。图3为当占空比大于0.5时且峰值电感电流发生微小扰动的电感电流波形图。由图3可知,后一个时钟周期的峰值电感电流的误差会比前一个周期的电感电流误差大,即电感电流误差信号振荡发散,系统不稳定并且振荡周期是开关周期的2倍。对于这个问题,目前大多数文献中都采用了斜坡补偿的方法 [7] [8]。引入斜坡补偿后,电流误差信号每经过一个时钟周期,幅度成比例衰减,直到最后消失。斜坡补偿通过给峰值电感电流信号叠加一个相同周期的负斜率斜坡补偿信号,使占空比小于0.5,稳定系统。对于斜坡补偿来说,斜率越大,振荡的衰减越快,但如果补偿斜率过大,则会造成过补偿。过补偿会加剧斜坡补偿对系统开关电流限制指标的影响,从而降低系统的带载能力;并且过补偿会影响系统的瞬态响应特性。通常选择斜坡补偿的斜率需根据需要折中考虑,其斜率m在工程上一般等于0.7 m2 (m2 = VOUT/L)。加入谐波补偿后,当占空比大于0.5,系统将会依旧保持稳定。

Figure 3. Inductor current waveform diagram when the duty cycle is greater than 0.5 and the peak inductor current is slightly disturbed
图3. 当占空比大于0.5时且峰值电感电流发生微小扰动的电感电流波形图
3. 仿真验证及结果分析
混合动力系统的能量管理控制目标是:当系统需求功率较低时,氢燃料电池工作于平均输出功率状态,不仅给负载供电,并且向锂电池充电。当系统处于峰值功率需求时,氢燃料电池工作于满负荷输出状态,同时锂电池对负载充电,补偿氢燃料电池的功率缺额。
基于2中所述原理,本文搭建了图4所示的动力系统电路图。设置负载电流信号为:0~0.1 s、0.12~0.22 s、0.24~0.34 s、0.36~0.46 s和0.48 s及以后为5 A,0.1~0.12 s为20 A,0.22~0.24 s为30 A,0.34~0.36 s为68 A,0.46~0.48 s为34 A,即正常情况下负载电流为5 A,加速时刻最大负载电流能到68 A。设置DC/DC电流控制信号时间间隔与负载电流信号相同,正常运行状态为0.214 A,当加速时设为0.27 A。当负载需求变大时,利用该信号控制氢燃料电池输出功率为满负荷状态。
图5、图6为锂电池输出电流、电压波形。图7~8为氢燃料电池组输出电流、电压波形。可以看出

Figure 4. Circuit diagram of electric vehicle power system based on hydrogen fuel cell
图4. 基于氢燃料电池的电动车动力系统电路图

Figure 5. Lithium battery output current waveform
图5. 锂电池输出电流波形

Figure 6. Lithium battery output voltage waveform
图6. 锂电池输出电压波形

Figure 7. Output current waveform of hydrogen fuel cell
图7. 氢燃料电池输出电流波形
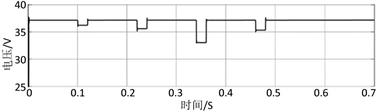
Figure 8. Output voltage waveform of hydrogen fuel cell
图8. 氢燃料电池输出电压波形
当负载在正常功率需求状态下,氢燃料电池输出电流为11 A,锂电池输出电流为−6 A,处于充电状态。当负载处于峰值功率需求状态下,如0.34~0.36 s时,氢燃料电池输出电流约为12 A,锂电池输出电流约为56 A,即在该情况下,氢燃料电池和锂电池共同为负载供电,且氢燃料电池功率满负荷输出。测得的系统输出功率最大为2312 W,是所用氢燃料电池最高输出432 W的六倍左右,证明氢燃料电池车混合动力系统能够为负载提供充足的动力,且动态响应迅速。根据以上仿真测试分析,在氢燃料电池发电系统动态响应允许的条件下,本文所设计并搭建的氢燃料电池混合动力控制系统能够快速控制氢燃料电池的输出功率和锂电池的输入输出功率。混合动力系统中两动力源的功率分配合理,动态响应快。验证了该动力系统仿真模型的准确性。
4. 结论
本文选用两相交错并联buck电路作为变换器,利用本文提出的功率分配单元结合峰值电流控制模式,搭建了氢燃料电池车混合动力系统仿真模型。仿真结果表明,通过采用本文设计DC/DC变换器的反馈补偿网络可对氢燃料电池的输出功率进行控制和管理,从而对混合动力系统进行能量管理,实现了氢燃料电池动力系统能量的合理分配,使得本文所设计的混合动力控制系统能够为负载提供充足动力并迅速跟踪负载的变化,并且验证了混合动力系统的可控性。
致谢
在本设计研究阶段,笔者遇到了一些专业领域的问题。在这个过程中,中国矿业大学的老师与师兄师姐给予了许多帮助,让笔者项目得以顺利进行。在此,对给予笔者帮助的老师们以及学校致以真诚的感谢!