1. 引言
随着我国道路交通的迅速发展,交通锥在各个方面的运用也越来越广泛。常见的交通锥多用于工程提醒、道路设置、人流改道等方面,如建筑工地的区域划分、引导活动和节日的人流、停车场人车分流,在体育比赛中作为标示等。此外,交通锥可放置于机坪飞机四周,特别是发动机附近,用于提醒地勤作业人员及车辆避免撞击。在特定的情况下,其亦可以倒过来作为漏斗或支架使用。在工程实践中交通锥使用量较大,以往的人工回收方式已不能满足目前的回收要求,发明效率更为卓越的交通锥收放装置已成为当今交通公路发展的迫切需求。
目前已发明的交通锥回收装置的机械自动化程度普遍偏低,摆放于公路或施工现场的交通锥通过车子的正向行进,被机械手爪或者传送带等装置运输至置于车内的回收轨道,最后被运送至车斗之中储存起来。回收过程中,常需要工人对回收装置的高度、回收速度等因素进行调整。已发明的交通锥回收装置虽然从一定意义上减少了人工的操作强度,但仍存在安全隐患,且市面上大多数的交通锥自动回收装置需使用特定的车型 [1] 对其进行装载使用,当道路状况发生变化的时候回收效率会受到很大影响。为提高交通锥回收效率以及操作安全性,降低回收成本,设计了一种可适用于回收各种尺寸交通锥的收集装置。该装置不添加额外动力源,是一个单独的悬挂装置,且对车型无特定要求,适用性强。
2. 交通锥回收装置的系统组成与工作原理
2.1. 机构组成
该交通锥自动回收装置主要由抓附系统、传送系统、动力系统组成,如图1所示。整个装置是经由连接板(两侧分别设有同作业车槽帮板及回收装置槽帮板相连接的链结构)同工作车辆进行连接。该回收装置一般悬挂于车身右侧如图2所示,方便驾驶员观察并调整车辆的行驶速度以确保回收过程的稳定进行。当车运动的时候,带动整个机构进行运动。
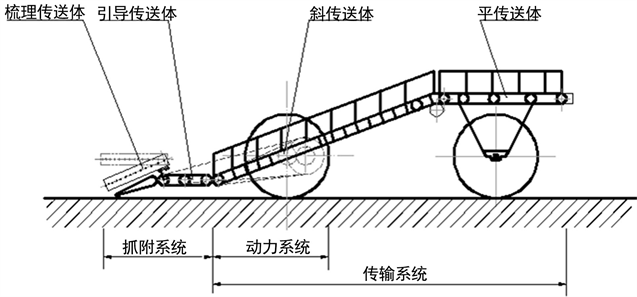
Figure 1. Main view of traffic cone recovery device
图1. 交通锥回收装置主视图
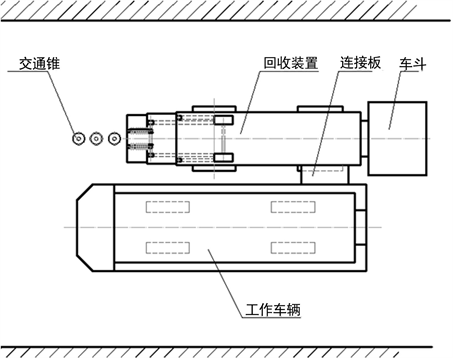
Figure 2. Schematic diagram of relative position of recovery device of working vehicle
图2. 工作车辆回收装置相对位置示意图
2.2. 工作流程
本文所设计的交通锥回收装置工作原理如下:交通锥码放在道路上,收集交通锥(路锥)的操作工人进入汽车车斗内,将汽车驾驶员同侧的槽帮板打开并放下,使用连接板将工作车辆与回收装置连接起来。
汽车开动后带动交通锥回收装置同汽车沿同一方向行进。如图3所示,行进过程中回收装置车轮与地面接触而转动,并带动与车轮同轴的动力轮进行转动,动力轮和啮合轮相啮合,与啮合轮同轴的传动轮通过链条将动力输送至斜传送体下端轴以及引导传送体的左端轴带动引导传送和梳理传送体进行运动。
当动力输送至梳理传送体后,该传送机构左端轴通过链条和传动齿轮相连接,当该齿轮开始转动后,带动与之配套相连的伞齿轮副的转动,从而带动整个抓附部分的机构进行运动。当动力输送至斜传送体下端轴后,与斜传送体下端轴紧密相靠的传送带随之运动起来,引导着交通锥向上输送。当交通锥运动至平传送体时候,在两侧防护栏的作用下,交通锥以一定的水平速度运动至储存箱 [2],进而完成整个回收过程。
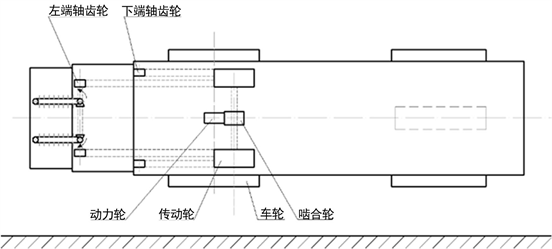
Figure 3. Relative position diagram of recovery gear
图3. 回收装置齿轮相对位置示意图
3. 总体设计
3.1. 抓附机构设计
为将路面上的交通锥运送至输送带,需使用特定装置对交通锥进行抓附 [3]。如图4所示,该抓附机构为一套平行排列的滚筒装置,滚筒的动力来源为右侧的动力系统,因摩擦而产生的驱动力经由链条以及一对平行的伞齿轮副输送至滚筒的驱动机构,滚筒在此驱动力下进行旋转,完成对交通锥的抓附。考虑到加工成本和生产可操作性,对该抓附模型进行了简化,并对滚筒表面上的橡胶突刺结构进行了阵列化排布以增大摩擦力。
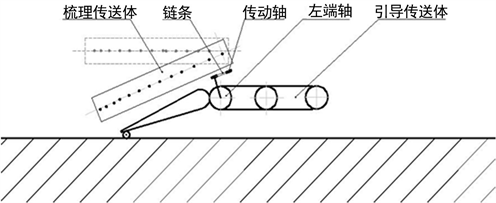
Figure 4. Structure diagram of grab system
图4. 抓附系统结构示意图
3.2. 传动机构设计
常见的交通锥规格一般为500*350 mm,较小规格为300*230 mm。本文选取较大规格的交通锥(700*350 mm)进行分析,以满足各种情况下的回收需求。交通锥在沿着斜传送体向上传送的过程之中,受到重力以及摩擦力的影响。如图5所示,将交通锥等效成近似模型,对其进行受力分析。

Figure 5. Stress analysis diagram of traffic cone on inclined plane
图5. 交通锥在斜面上受力分析简图
图5中,d:两个交通锥的中心的距离;n:两个交通锥的边缘的距离;μ:摩擦系数(常见干摩擦情况下橡胶之间的摩擦系数为0.48),取0.48;θ为写斜传送体和水平面之间的夹角;L:斜传送体的总长度。若要使得交通锥在上行的过程之中不会滑落,需要满足条件:
(1)
(2)
(3)
经由计算得,θ ≤ 25.64˚。即,斜传送体与水平面之间的夹角至少为25.64˚,才可保证交通锥在传输过程中不会发生滑落现象。选取进行计算的交通锥的规格为780*380 mm,取d = 500 mm,n = 200 mm,则:
(4)
 (5)
(5)
(6)

Figure 6. Structure diagram of AC transmission system
图6. 交传输系统结构示意图
如图6所示,抓附系统及传输系统共用一条传送带,该传送带可根据交通锥形状及路况的不同进行拆卸替换,互换性强。
3.3. 动力系统设计
对于高度 750 mm < H ≤ 90 mm的交通锥来说,质量为3 kg~5 kg,进行大批量输送的时候,需耗费能源维持系统运行。从节能角度出发,本设计不添加额外动力源,采用纯机械方式进行传动。动力系统齿轮相对位置示意如图7所示。
当汽车沿既定方向行进时,与车轮同轴的动力轮同时开始旋转。为使传送带向上运送交通锥,须在动力轮的旁设置一与其外啮合的啮合轮。传动轮与啮合轮同轴,通过链条将动力传输至斜传送体下端轴以及短平传送体左端的轴,该系统的各个齿轮相对位置示意图详见图8。
为减小传动过程中的颠簸程度,需要保证动力轮在运动过程中一直以平传送体左端轴的轴线为中心进行活动,这样车轮才可持续同地面接触。同理,引导传送体需一直以左端轴的轴线为中心进行活动,这样才能确保位置轮时刻紧贴地面。
由上述计算可知,斜传送体L = 3.1 m,为提高回收效率,将其延长为3.5 m。同时,为提高回收机构整体稳定性,将传输带宽度增大,并在两侧设置护栏。
交通锥被送至平传送体尾端时,具备一定初速度,此速度和回收车行驶速度有关。为防止交通锥因行进速度过大而飞离传送带,限定行驶速度最大值为5 km/h。取最大速度行驶速度对交通锥的传输速度分析。
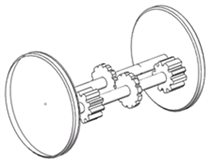
Figure 7. Stereogram of gear position of power transmission system
图7. 动力输系统齿轮位置立体图
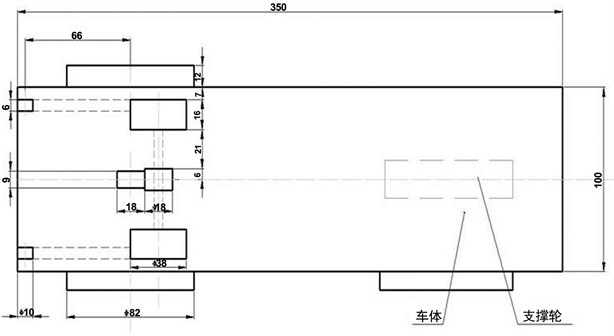
Figure 8. Relative position and specific size of gears in power transmission system
图8. 动力输系统齿轮相对位置及其具体尺寸
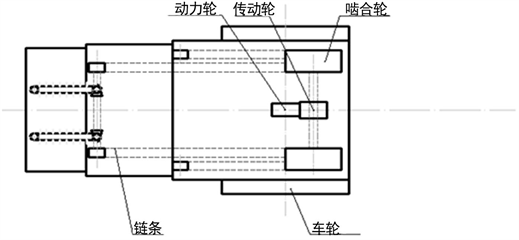
Figure 9. Top view of power transmission system gear position
图9. 动力输系统齿轮位置俯视图
工作车辆在行驶的过程中,带动回收装置运转起来。如图9所示,回收装置的车轮转动之后,带动各部分系统进行运转。因啮合轮和斜传送体的下端轴齿轮及引导传送体的左端轴齿轮之间的连接方式为链传动,并不会改变线速度。所以啮合轮的运转速度即为整个回收装置的工作速度。速度计算:
(7)
 (8)
(8)
(9)
:工作车辆的行驶速度;
:与工作车辆同轴的动力轮的转动线速度;
:与动力轮外啮合的传动轮的转动线速度;
:与传动轮同轴的齿轮的转动的线速度。
经由计算得,
,及在工作车辆行驶速度为5 km/h的情况下,该回收装置的回收速度为2 km/h,相对运动速度方向和车辆行进方向一致。
4. 结论
本文设计的交通锥回收装置是一种纯机械转置,不含有任何电器控制元件,且不需要额外的动力源。该装置可作为一套附属机构挂在卡车上(或其他形式车辆)进行工作,适用于各种不同形状、不同规格尺寸的交通锥的回收。该装置结构简单、结构稳定性、操作方便、工作连续性较好,可适用于不同的工程需要。此外,其制造成本和运行费用较低,节能环保,应用前景十分广阔。