1. 引言
传感器作为多传感器系统的信息获取装置,其读数的可靠性和准确性将直接影响整个多传感器系统的性能。由于多传感器系统的分析与决策依赖于传感器获取信息的融合结果,一旦传感器的测量质量下降,甚至出现故障,多传感器系统的整体性能将大大降低。鉴于此,二十世纪九十年代初,英国牛津大学的Henry教授和Clarke教授提出了自确认传感器的概念并提出了基本框架 [1]。自确认传感器是一种新型的智能传感器,不但能够输出传感器的测量值,还能够进行故障检测与隔离、故障诊断、故障恢复、不确定度估计及状态评估等自确认功能。
故障检测与隔离(Fault Detection and Isolation, FDI)技术是自确认传感器中实现异常状态监测的关键自确认技术 [2] [3]。目前,故障检测与隔离方法主要是采用硬件冗余和软件冗余。基于软件冗余的传感器故障检测与隔离方法是自确认传感器中的主要方法,主要包括基于解析模型的方法和基于数据驱动的方法。基于解析模型的方法是通过对传感器工作机理的准确建模,利用模型输出值与实际输出值生成的残差实现故障检测与隔离,分为观测器法和滤波器法。基于数据驱动的方法是在一定的代价函数约束下,通过对历史数据进行学习和挖掘,得到相应的数学模型关系,进而逼近系统数据中所隐含的映射机制,以此进行故障检测与隔离,主要分为基于信号处理的方法、多变量统计分析法以及人工智能方法 [4]。
为了提升多传感器系统的可靠性和可维护性,根据自确认传感器框架,研究面向多传感器系统的故障检测与隔离算法以提高系统的性能。本文提出了一种基于数据驱动模型的故障检测与隔离方法,该方法利用主成分分析算法对多传感器系统测量值进行建模,然后利用SPE统计量对故障信号进行检测,再利用基于SPE的自适应重构方法对故障传感器进行隔离。该方法能够有效地实现多传感器系统故障检测,并能够准确定位故障传感器。
2. 基于主成分分析的故障检测
主成分分析(Principal Component Analysis, PCA)是一种数据驱动的多变量统计分析技术,广泛应用于工业过程控制中多变量故障检测与隔离。基于PCA的故障检测与隔离方法的实现过程如下:
假设原始数据矩阵 ,其中n表示观测样本的数量,m为观测变量的数目。对
进行标准化,获得标准化数据矩阵
。通过PCA可以将
分解为
,其中n表示观测样本的数量,m为观测变量的数目。对
进行标准化,获得标准化数据矩阵
。通过PCA可以将
分解为
(1)
其中,
称为主成分子空间(PCS),
称为残差子空间(RS);
为得分矩阵,
为载荷矩阵,k为PCA模型的主成分个数。
载荷矩阵
,可以通过以下步骤获得:
步骤一:计算
的协方差矩阵
,
(2)
步骤二:对协方差矩阵
进行奇异值分解(SVD),
(3)
其中,
为由协方差矩阵
特征值按照降序排列获取(
)组成的对角矩阵,
由协方差矩阵
所有特征值对应的特征向量构成。
步骤三:采用累积方差百分比(CPV)选取主成分的最优个数,
(4)
步骤四:利用
前k个列向量组成载荷矩阵
步骤五:通过载荷矩阵
求得投影矩阵
和
:
(5)
原m维数据空间被k维主成分子空间与
维残差子空间代替,变量之间的相关性被去除。测量向量
可以分解为
,其中
和
分别将测量向量
投影到PCS和RS。
PCA是一种有效的系统故障检测工具,主要通过平方预测误差SPE和Hotelling’s T2统计指标实现,定义如下:
(6)
置信水平为
的SPE统计量的控制限为
(7)
其中,
,
,
表示显著性水平为
的高斯分布对应的分为点值。
(8)
式中
是由
前k行与k列组成的方阵。
置信水平为
的T2统计量的控制限为
(9)
其中,
指自由度为k和
的F分布在置信度为
的分位点。
PCA故障检测模型是通过正常运行状态下的数据建立的,在系统正常情况下,SPE和T2统计量都小于各自的控制限。一旦系统发生故障,将导致SPE和T2统计量发生突变,超过控制限
和
,从而实现故障检测。
3. 基于自适应重构的故障隔离
假设多传感器系统由d个传感器组成,在t时刻有
个传感器发生故障,多传感器系统的输出表示为
。根据故障重构原理,经过故障重构后的多传感器系统输出信号
表示为
(10)
其中,
是在多传感器系统中在i个故障发生时,第j个传感器故障,
。
称为故障方向,其值单位矩阵
的第j列,而
为在故障方向
上的幅值。
如果能够准确地对多传感器系统输出信号进行重构,重构后的信号的SPE统计量应该具有最小值,即
(11)
其中,p为多传感器系统中故障的传感器数量,
为故障方向集合,
为故障方向集合
对应的故障幅值集合。
(12)
其中,
,上式可以由最小二乘法得到故障大小的最优估计 [5] ,能够实现对多故障的隔离。
(13)
重构后的多传感器系统测量值为
(14)
在残余空间中
(15)
利用公式(10)可知,
,则重构的SPE统计量为
(16)
4. 算法流程
如图1所示为多传感器系统故障检测与隔离算法流程,流程包括PCA建模过程和传感器故障检测与隔离过程。首先,利用多传感器系统的正常测量值进行PCA建模,并利用累计百分比差异(CPV)求取SPE统计量控制限
。随后,在故障监测阶段,建立的PCA模型对多传感器系统测量值进行故障检测。如果多传感器系统监测值的SPE统计量大于控制限
,则被认定多传感器系统存在故障,随即执行自适应重构算法,求解故障的数量和故障的幅度,以SPE统计量作为重构标准对故障传感器进行隔离,确定故障传感器。
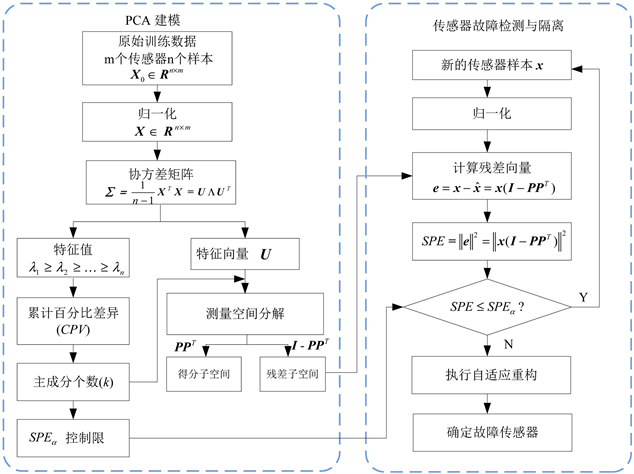
Figure 1. Flow chart of fault detection and isolation algorithm for multi-sensor system
图1. 多传感器系统故障检测与隔离算法流程图
5. 实验
5.1. 多传感器实验系统
为了验证提出的故障检测与隔离方法的效果,研制了如图2所示为本文设计的多传感器实验系统。实验系统由PC机,PXI机箱,直流电源,MOS气体传感器阵列,电扇,注射器及待测气体样本组成。该多传感器实验系统为一种基于MOS气体传感器阵列的机器嗅觉系统,用于对气体进行识别与分析。由于MOS气体传感器阵列装配有多种金属氧化物半导体气体,因此该试验系统具有多传感器系统的特点。本文采用的MOS气体传感器阵列的选型和数量如表1所示。本文中的仿真试验数据均由上述实验系统产生,数据采集过程中严格控制参数的变化。

Table 1. Selection of MOS Gas Sensor Array
表1. MOS气体传感器阵列选型
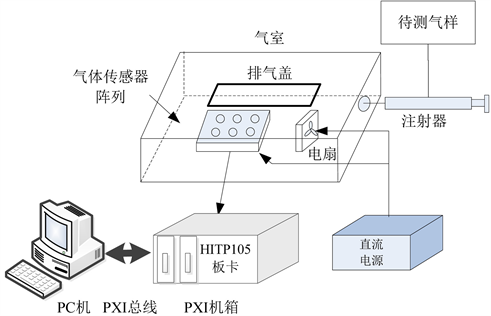
Figure 2. Structure diagram of multi-sensor experimental system
图2. 多传感器实验系统结构图
5.2. 实验结果
为了验证提出的基于PCA的故障检测算法的有效性,利用4.1小节中的多传感器试验系统采集的正常运行的传感器数据对PCA模型进行建模,确定SPE统计量的控制限。在验证过程中,在正常传感器输出信号上叠加不同类型的故障,进行测试。如图3所示,为偏置故障下,PCA故障检测模型的测试结果。如图4所示,为冲击故障下,PCA故障检测模型的测试结果。由此可见,本文提出的基于PCA的故障检测方法能够有效地对多传感器系统进行故障检测。
针对不同浓度情况下正常的MOS气体传感器阵列的输出信号,采用叠加的方式生成不同故障类型下的仿真数据样本集,并根据该样本集对PCA故障检测模型的有效性进行验证。表2所示为不同故障类型下PCA故障检测模型的检测率。从实验结果可以看出,针对不同的故障类型,基于SPE统计量的PCA故障检测模型的故障检测率达到99%以上。
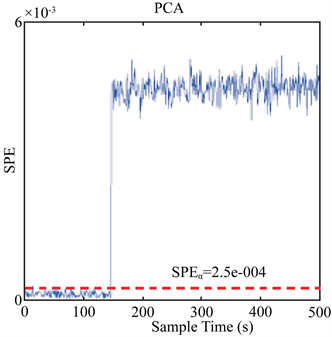
Figure 3. The result of failure detection under bias failure
图3. 偏置故障下的故障检测结果
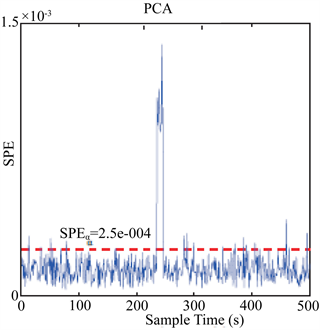
Figure 4. The result of failure detection under impacted failure
图4. 冲击故障下的故障检测结果
Table 2. Detection rate of PCA failure detection model under different failure types
表2. 不同故障类型下PCA故障检测模型的检测率
为了验证基于自适应重构的故障隔离方法,本文分别设置不同故障类型、故障数量(1~4个)、不同故障幅度的故障仿真数据集,并利用提出的故障隔离方法进行测试,测试结果如表3所示。由实验结果可知,与传统的贡献图方法 [6] 相比,基于PCA的自适应重构方法能够更加有效地定位多传感器系统的故障,多故障隔离准确率达到97%以上。
Table 3. Accuracy of multiple failure isolation with different fault isolation methods
表3. 故障类型下PCA故障检测模型的检测率
6. 结论
本文提出一种基于主成分分析(PCA)自适应重构技术的故障检测与隔离算法,该方法利用SPE统计量实现对多传感器系统测量值的故障检测,再通过基于SPE统计量的自适应重构算法实现对多传感器故障的隔离,利用设计的机器嗅觉系统,以MOS气体传感器阵列作为研究对象,获取大量实验样本进行故障仿真以验证提出算法的有效性。本文提出的故障检测与隔离方法能够有效地实现多传感器系统的故障检测与隔离,具有较高的准确率。
基金项目
本论文受国家自然科学基金(61327804, 61201306)资助,2018航天科学技术基金资助。