1. 引言
加速器的磁铁电源系统是为加速器各种类型的电磁铁供电的系统。调节磁铁电源的电流,可以改变磁铁的磁场,从而控制粒子运动轨道 [1] 。相对与普通的电源,加速器电源有其自身的特殊性:首先,加速器电源一般为电流源,而且大部分为大功率电源,高电压高电流;其次,加速器电源要求较高的电流精度和稳定度;再次,加速器电源的工作模式、馈电方式、内部器件布局、冷却方式都与加速器的运行方式、特点息息相关。加速器的差异导致了大部分加速器电源设备为非标设备,不可能在市场买到 [2] 。
目前电源朝着轻型化、便利化、模块化方向发展,大型加速器磁铁电源一般采用模块串并联的方式来扩充电源容量。模块化电源的优势是模块化便于批量生产,同时容易维护,而且在电源机械设计空间以及散热等都可以很好的匹配,但是模块化电源对控制系统提出了新的要求,模块并联电路均流问题,模块串联电路均压问题,以及模块同步问题等都对控制器的开发提出了挑战 [3] 。
本文拟设计一套4模块并联输出的电源。理论设计每路输出500 A/75 V,总输出2000 A/75 V。通过Matlab/simlink仿真软件搭建硬件电路图,分别对功率回路和控制回路进行仿真,通过仿真验证并联设计的可行性,并为真实的电源硬件设计提供理论支持。
2. 四模块并联电源功率单元设计
四模块并联电路功率单元,采用AC-DC-AC的变流方法。三相进线通过二极管不控整流器进行整流,适当的配置平波电感L1和滤波电容C1可以保证二极管整定后的直流电压恒定,同时为了抑制后级交流输出对电网的影响,采用Boost电路进行功率抑制,通过控制V6的开通和关断可以达到功率抑制的作用,后级DC-AC采用H桥控制方式,通过控制器给V1~V4以驱动脉冲,从而达到控制目的。四模块并联电源功率单元4个模块完全相同,功率拓扑如图1所示。
三相不控整流输入输出关系为:
(1)
--
为直流侧电压;
--
为交流侧相电压。
Boost电路输入输出关系为:
(2)
--T为开关管V6的控制脉宽周期;
--
为开关管V6控制脉宽低电平时间。
后级DC-AC的H桥变换通过控制V3和V4管的开通和管段,达到控制目的
(3)
--t为V3和V4管同时打开的时间;
--
为H桥控制脉宽的PWM周期。
通过在每个PWM周期改变PWM波的脉冲宽度就可以调节t,从而实现DC-AC的变换目的。
3. 四模块并联电源控制系统设计
四模块并联电路控制系统设计主要分为两部分:1) DC-DC的Boost电路;2) DC-AC的后级H桥控制电路。
3.1. DC-DC的Boost电路控制器
Boost电路的主要作用是维持母线电压恒定的同时减少后级输出对电网侧的干扰,提高电源的输入功率因数。
Boost电路通过采集Boost的输出电压来进行闭环控制,控制系统仿真如图2所示,给定电压和输出

Figure 2. Boost power control simulation
图2. Boost电源控制仿真图
电压的差值进入PID调节器,PID的输出经过限幅器后进入PWM生成器,生成PWM脉宽,控制IGBT管的开通和关断。图中switch5为一个转换开关,在仿真设计时可以通过控制该开关来启动/禁止Boost闭环。
3.2. DC-AC H桥控制器
四模块并联电源H桥控制系统的拓扑结构如图3所示,采用双闭环的控制策略,外环采用高精度的电流传感器采集输出电流,内环采用霍尔电流传感器采集模块电流进行均流控制。
四模块均流电源后级输出采用H桥的方式,通过采集输出电流和模块电流构成双闭环控制,输出电流外环精确控制输出电流,模块电流内环确保四模块均流。
电流外环的仿真框图如图4所示,其中I_back为传感器采集到的输出电流,I_Norminal为传感器变比系数,通过归一化后与电流给定进行比较进入PID控制器,通过限幅器后输出为内环电流环的给定。图中switch9为一个转换开关,在仿真设计时可以通过控制该该开关来启动/禁止电流环闭环。这样的设计在电路调试的时候非常方便。
内环电流环控制器结构与外环相同,只是反馈为各功率模块电流传感器采集得到的电流,其他部分完全一致。
4. 四模块并联电源matlab仿真
图5为四模块并联电源功率回路的整体仿真框图,图6为四模块电源控制回路的整体仿真框图。控制框图对Boost控制器,电流闭环控制器,均流环控制器分别做了封装,在调试的时候仅需要在封装后
图3. 四模块并联电路控制示意图

Figure 4. Current loop simulation block diagram
图4. 电流外环的仿真框图

Figure 5. Four-module parallel power simulation diagram
图5. 四模块并联电源功率仿真图

Figure 6. Four-module parallel power control simulation diagram
图6. 四模块并联电源控制仿真图
的界面设置仿真参数即可。
4.1. 输出为直流电流时仿真结果
给定
时,仿真结果如图7~图11所示。
母线电压仿真图如图7所示,通过仿真可以看到母线电压迅速建立起来而且能够维持在给定的300 V。
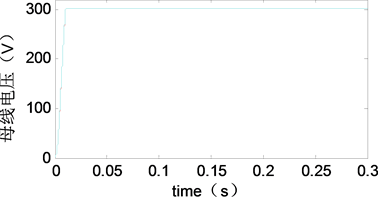
Figure 7. DC bus voltage simulation waveform
图7. 直流母线电压仿真波形
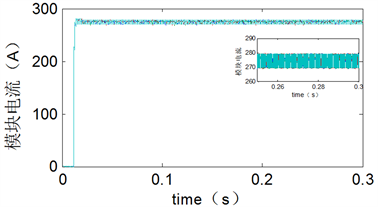
Figure 8. Module input current simulation waveform
图8. 模块输入电流仿真波形

Figure 9. Power output current simulation waveform
图9. 电源输出电流仿真波形

Figure 11. Current voltage simulation waveform at AC output
图11. 交流输出时目前电压仿真波形

Figure 13. Current voltage simulation waveform at AC output
图13. 交流输出时目前电压仿真波形

Figure 14. Current voltage simulation waveform at AC output
图14. 交流输出时目前电压仿真波形
4路模块电流在经过软起延时后也迅速的稳定在275 A附近,如图8所示,通过局部放大可以看到模块电流相对比较稳定。输出电流如图9所示,输出电流误差曲线如图10所示(误差放大10,000倍显示),可以看到电源输出电流误差好于100 PPM。
4.2. 输出为交流电流时仿真结果
给定
,
时,仿真结果如图12~图14所示。从仿真可以看出输出为带直流偏置的交流信号,母线电压也可以稳定在给定的300 V,不受交流信号干扰。模块电流随着输出电流变化而变化,由于跟踪的交流信号,输出电流稳定度较直流信号略有偏差,但是基本满足设计需求。
5. 结论
本文通过对四模块并联2000 A/75 V电源的Matlab/simlink仿真,对电源硬件结构和数字控制器分别搭建仿真系统,通过调试,电源输出满足要求,模块均流问题可以得到控制,系统具有良好的动静态性能。通过仿真给实际电源硬件调试提供了理论支撑,为后续电源设计提供数据。