1. 引言
机械设备的进步与发展,始终伴随着人类社会的进步。随着社会的进步和科技的发展,当今社会对通信能力的要求也越来越高,人与人之间的快速通信,地区与地区之间的通信显的尤为重要,特别是我国新疆、西藏等欠发达的地区,通信能力差,如果想提高这些地区的通信能力,就必须在这些地区铺设大量通信线路。这些地区往往环境恶劣、地形复杂、海拔较高,不适合大量人工作业,适合机械化开沟铺设管道,机械化开沟作业可节约大量人力物力,减少保障费用,可以克服环境恶劣、地形复杂、海拔较高等诸多不利因素,同时机械化开沟设备可大大提高工作效率,节省工作时间,更重要的是,该项机械化开沟设备可适用于多种复杂地形,斜坡、沟壑、土坡等复杂地形,具备非常强的对复杂地形适应能力,可更好更快的完成工程作业任务。
2. 开沟铺管机行走机构优化设计
2.1. 开沟铺管机行走机构的机构运动示意图
开沟铺管机是与人们生活相关的重要的机械之一,在人类的社会生活中发挥着重要的作用,开沟铺管机能一次完成开沟、铺管、覆土作业和铺设地下管线。常用的开沟铺管机有两种类型:一种是在暗沟犁的基础上发展而成,即将管道牵引在暗沟犁圆柱形塑孔器的后面,并铺设在由塑孔器塑成的孔内,具有较高的生产效率,但其在机械设计方面具有安全性、稳定性与低成本性,但不具有在复杂地形开沟作业的能力,设备地盘距离地面高度大约30至40厘米,车身高度较低,通过障碍局限性,开沟质量差等特点 [1] ;另一种是采用链刀式或其他类型的开沟部件开出埋管沟,将管道置放沟内,再覆土压实。链刀式开沟铺管机能开出上、下等宽的深沟,由人工通过管子铺放滑道,将瓦管或波纹塑料管置放沟内。开沟部件是装有刀齿的环形链条,刀齿切割土壤并将其带到地面,由螺旋或带式输送器将土送到沟的一侧或两侧,铺管后再由复土装置将土回填沟内。机器作业时的速度为30~300米/小时,可使用中、小型拖拉机开挖深度较大的埋管沟,根据配套拖拉机的功率大小,最大沟深可达1.2~2.5米。还可以将开沟机安装在履带底盘上,将履带通过性强、环境适应性强等特点与开沟机设结合,利用履带底盘的高通过性来克服中小型拖拉机功率小,通过性差的特点,但设备笨重复杂,没有合理的减振系统,履带刚性的固定在车架上,设备在通过斜坡时非常容易侧翻,在泥泞道路,沙石道越障能力差,且使用成本高,费用大。
开沟铺管机整机主要分为工作区和行走区两大工作部分:工作区主要由开沟机构,升降机构,覆土回填机构组成,而动力行走区由行走机构,发动机,变速箱,驱动轮,传动区等组成。行走机构是开沟铺管机适应复杂工作环境的核心部件之一,开沟铺管机行走机构对复杂地形的通过能力,直接关系到整个开沟铺管机的工作性能,对于复杂多变的地形地貌,本开沟铺管机行走机构通过控制主油缸缸杆在主油缸缸筒内的伸缩,进而控制两小臂绕固定中心点的圆周摆动,从而带动履带行走机构的实现其合理的上下运动,同时履带行走机构也可以绕转向圆盘进行自由转动,四个行走机构可独立调节,也可以协同调节使得开沟铺管机整机保持平衡;该开沟铺管机能够在有大倾斜角度的地形下工作的能力,并同时保持机身平衡,可以快速的通过复杂地形,该机对复杂的地形和恶劣的自然环境适应能力强,适合在我国的新疆、西藏等偏远地区进行管道铺设工作,该设备同时也可以节约大量的人力物力财力,减少工作工序,加快工作进度。
传统开沟铺管设备中,开沟机行走机构与开沟机机身属于刚性连接,在工作过程中设备振动大,工作稳定性差,存在冲击,振动,进而导致开沟能力差,大大降低了其使用价值。因此,本文着重对开沟铺管机的行走机构进行了详细的结构优化设计。相比较之下,采用可主动干预调节的行走机构,可减小工作过程中带来的冲击和振动,适应复杂工作环境,提高工作效率和使用价值,因此,采用可主动调节的行走机构对提高设备的工作效率具有重要意义。
根据优化设计方案,开沟铺管机的行走机构设计如图1所示为行走机构机构运动示意图。主要由6大部分组成,0:机体;1:主油缸缸筒;2:主油缸缸杆;3:大摆动臂;4:小摆动臂;5:主支撑臂。
复杂地形开沟设备行走机构,如图2所示为行走部分的主视图、如图3所示为行走部分的俯视图,
 0:机体;1:主油缸缸筒;2:主油缸缸杆;3:大摆动臂;4:小摆动臂;5:主支撑臂
0:机体;1:主油缸缸筒;2:主油缸缸杆;3:大摆动臂;4:小摆动臂;5:主支撑臂
Figure 1. Motion picture of walking mechanism
图1. 行走机构机构运动示意图
 1:转向关节;2:大臂;3:下小臂;4:上小臂;5:油缸缸筒;6:油缸缸杆
1:转向关节;2:大臂;3:下小臂;4:上小臂;5:油缸缸筒;6:油缸缸杆
Figure 2. The main view of the walking part
图2. 行走部分的主视图
 2:大臂;3:下小臂;4:上小臂;7:主机架;9:转向油缸缸筒;10:转向油缸缸杆;
2:大臂;3:下小臂;4:上小臂;7:主机架;9:转向油缸缸筒;10:转向油缸缸杆;
Figure 3. The top view of the walking part
图3. 行走部分的俯视图
当开沟铺管机进行开沟作业时,如果是在平坦的工作表面进行作业,只需要保持四个独立行走机构在同一工作高度上即可。如果在地形比较复杂的恶劣工作环境下工作,此时可以通过调节油缸杠杆6在油缸缸筒5内移动来改变独立行走机构的工作状态,以此使整机无论在平坦的工作表面还是复杂的工作表面都能保持整机平衡。
通过Pro/E软件对行走机构的各部分零件进行三维建模得到三维模型,并进行装配,如图4所示为行走机构局部装配图,然后进行运动仿真,检验设计的合理性,并检验其运动是否产生干涉。通过三维软件仿真后,各零部件之间并无干涉,装配合理,符合机械设计要求 [2] [3] 。局部装配图如下,该开沟铺
 1:大臂;2:油缸缸杆;3:油缸缸筒;4:主机架;5:上小臂;6:下小臂
1:大臂;2:油缸缸杆;3:油缸缸筒;4:主机架;5:上小臂;6:下小臂
Figure 4. Walking mechanism assembly drawing
图4. 行走机构局部装配图
管机进行开沟作业时,根据作业地形和作业环境的要求,通过调节油缸1中的油缸缸杆2的伸缩,控制下小臂3与上小臂4绕销钉的转动范围,调整行走机构的高度,以此来适应复杂地形,使设备车身在进行作业时保持平稳,工作时履带行走机构可绕转向关节通过油缸1与油缸缸杆2的伸缩实现自由转动。该设备工作时还可以实现原地360度自由转动,具体实施方法如下:四个独立履带行走机构通过转向油缸与转向油缸缸杆的伸缩向内旋转45度,即个实现原地360度自由旋转。图3为所设计行走机构的三维模型及相关零件的装配图。
2.2. 行走机构结构的创新
该设备通过延长主支撑臂3的长度,以此来提高该设备的工作高度,以便于通过较为复杂的地形,该开沟设备具有4个独立悬挂的行走装置,每个行走装置可以对其进行独立的调节,可以实现开沟机的原地360度旋转,斜坡行走,横向行走,纵向行走,可以灵活的独立调节4个独立行走装置的高度,从而通过沟壑,陡坡等复杂地形,具备通过性强,转向角度小等特点,如图5所示为行走机构部件布置模型1,如图6所示为行走机构部件布置模型2。
2.3. 行走机构细节展示图以及开沟机特殊工作状态展示
该设备具备独立的四个行走机构,可以适应多种工作环境,具备多种工作态,具体的工作状态如下,如图7所示为行走机构部件布置模型3,如图8所示为行走机构部件布置模型4,如图9所示为开沟机平行行走状态1,如图10所示为开沟机平行行走状态2,如图11所示为原地旋转状态1,如图12所示为
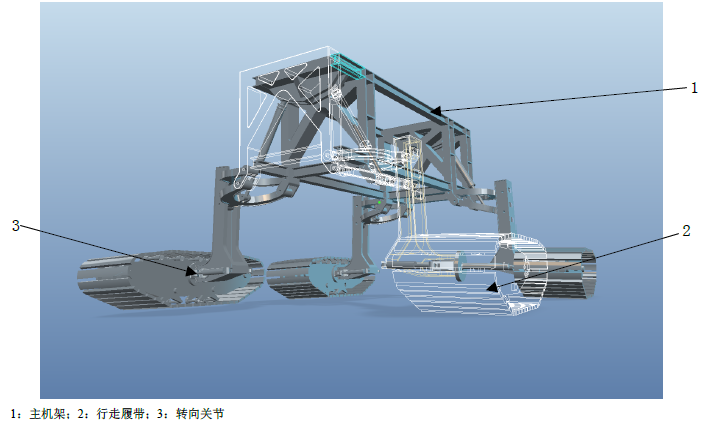
Figure 5. The walking mechanism part layout model one
图5. 行走机构部件布置模型1
1:主机架;2:行走履带;3:转向关节
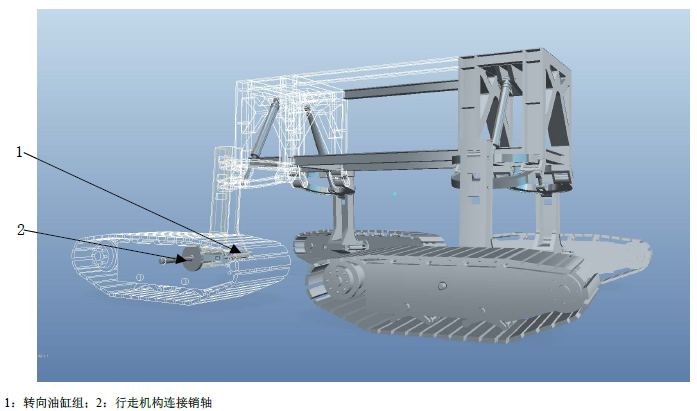
Figure 6. The walking mechanism part layout model two
图6. 行走机构部件布置模型2
1:转向油缸组;2:行走机构连接销轴
开沟机原地旋转状态2,如图13所示为开沟机通过斜坡。

Figure 7. The walking mechanism part model three
图7. 行走机构部件布置模型3

Figure 8. The walking mechanism part model four
图8. 行走机构部件布置模型4

Figure 9. Parallel running state one
图9. 开沟机平行行走状态1
3. 有限元仿真分析
3.1. 载荷工况分析
全地形开沟铺管机在工作过程中,行走机构承受的载荷种类很多,就其载荷的性质来看,行走机构所受到的主要载荷有弯曲、扭转载荷等几种。其中弯曲载荷主要产生于设备车身、车载设备、操控装置等的质量;扭转载荷产生于路面不平度对开沟设备造成的非对称支撑;在极限的工作条件下,行走机构还会承受一定的纵向载荷 [4] [5] 。
该设备依靠4个独立行走装置的协同调节,从而适应路面不平度对开沟设备造成的扭转载荷,该设备工作速度较低,并不需要进行深度的动力学分析,故只需要对行走机构的主要结构进行静力分析即可全面的了解行走机构的应力分布情况。
3.2. 主支撑臂结构分析
主支撑臂是开沟铺管机的重要组成,如图14所示为主支撑臂,主支撑臂是整个行走机构的最主要受力部件,同时主支撑臂同时受到来自其他几个与其相连接部件的力,并分担着行走机构整体受力弯曲所产生的弯曲应力,主支撑臂由立柱、筋板、连接销孔、履带转向节延伸组成,本项目中我们使用ANSYS对行走机构的主支撑臂进行分析,如图15所示。
3.3. 静载荷工况分析
3.3.1. 单位制确定及材料属性定义
多数的有限元计算程序都不规定所使用的物理量单位,为了方便使用,不同的问题可以使用不同的单位,但在同一个问题中各物理量的单位必须是统一的。由于在实际工程问题中可能会用到各种不同单位的物理量,如果只是按照习惯采用常用的单位,表面上看单位是统一的,实际上却不统一,从而导致错误的计算分析结果。也就是说对于实际工程问题,不能按照手工计算的习惯来选择各物理量的单位,而必须遵循一定的原则。
物理量的单位与所采用的单位制有关。物理量可分为基本物理量和导出物理量,在结构和热的相关计算中的基本物理量有:质量、长度、时间和温度。导出物理量的种类很多,如面积、体积、速度、加速度、压力、应力、导热率、比热、热交换系数、能量、热量、功率等,都与基本物理量之间有确定的
1:连接轴销孔;2:筋板;3:立柱;4:转向节
关系。基本物理量的单位确定了所用的单位制,然后可根据相应的公式得到各导出物理量的单位。具体的做法是,首先确定各物理量对的量纲,在根据基本物理量单位制的不同得到各物理量的具体单位。由于提供的设计资料中,尺寸材料均采用毫米,其他均采用毫米、其他均采用kg-m-s单位制 [6] 。为减少建模过程的工作量,建模初期并没有对尺寸单位进行换算。
该设备所使用的材料性能如下:由于主支撑臂是整个行走机构最重要的组成部件,同时也是主要的受力部件,所以应采用的材料为16 Mn,抗拉极限480 MPa至520 MPa,屈服极限280 MPa至350 MPa,弹性模量200 GPa,剪切模量79.4 GPa,泊松比0.3。
3.3.2. 网格的划分
如图16所示为主支撑臂网格划分后图片,对主支撑臂的主要受力部位进行较细的网格划分,以便于得到精确的求解结果。
3.3.3. 载荷与边界条件设定
设备在静载荷工况下,开沟铺管机行走机构承受的载荷是主要在重力加速度作用下而产生的。本文根据主要载荷的分布状况将其布置在主支撑臂的轴孔承载面上 [7] [8] [9] 。
此外,为消除行走机构的刚体位移,需要对主支撑臂与大摆动臂和小摆动臂的装配位置的节点处进行约束,静载荷工况下,其边界条件为:约束主支撑臂与大摆动臂和小摆动臂的装配位置的节点的三个平动自由度UX、UY、UZ,从而释放三个转动自由度ROTX、ROTY、ROTZ;约束主支撑臂与履带架装配节点的垂直方向自由度UZ,释放其他自由度。
3.3.4. 计算结果及其评价
静载荷工况下的高应力区,主要分布在主支撑臂下端圆弧过度处,如图17所示,其余部分的应力值都相对较小,图中最高应力处产生在主支撑臂与转向销轴的连接处旁的内部过度圆弧处 [10] ,应力值为64.8 MPa,这是由于主支撑臂下端延伸处过长,转向连接轴轴载质量较大造成的。材料的屈服度在280 MPa到350 MPa之间,故安全系数为4.32到5.40,由此可见车身结构是满足强度要求,并具有较大的强度富余,具体参数如图17所示为主支撑臂应力云图。
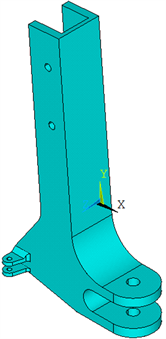
Figure 15. Finite element model of main bracket
图15. 主支撑臂有限元模型
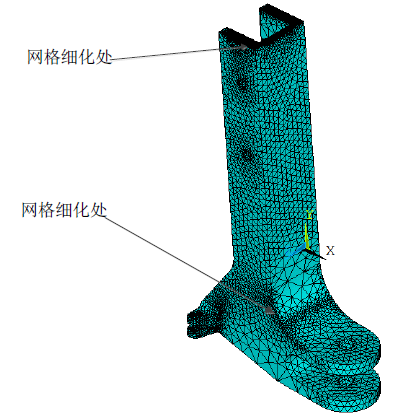
Figure 16. After mesh generation of main bracket
图16. 主支撑臂网格划分后

Figure 17. Colored stress patterns of main bracket
图17. 主支撑臂应力云图
静载荷工况下由于变形量过小,在此不予以说明。
4. 优化结果
通过对开沟铺管机行走机构进行上述的结构优化设计,改善了传统行走系统行走平稳性差,振动大,易受到冲击,不能适应复杂工作环境等问题,因此运用ANSYS进行结构优化设计是很有必要的。通过结构优化设计,我们的到了主支撑臂的应力云图,对主支撑有了进一步的了解,从而使得整体结构得以更加紧凑,工作平稳,环境适应性增强,工作效率得以提高。