1. 引言
在月球表面进行软着陆是人类探月工程中必须经历的一个环节,嫦娥三号在高速飞行的情况下,要保证准确地在月球预定区域内实现软着陆,关键问题是着陆轨道与控制策略的设计。其着陆轨道设计的基本要求:着陆准备轨道为近月点15 km,远月点100 km的椭圆形轨道;着陆轨道为从近月点至着陆点,其软着陆过程共分为6个阶段(即着陆准备轨道,主减速段,快速调整段,粗避障段,精避障段,缓速下降阶段),要求满足每个阶段在关键点所处的状态;尽量减少软着陆过程的燃料消耗 [1] 。
本文以2014年全国大学生数学建模A题为背景,建立动力学模型、非线性规划模型、参数化控制法等方法,针对嫦娥三号软着陆的轨道设计与控制策略问题,分阶段进行研究。
2. 确定嫦娥三号所需开普勒轨道中近月点和远月点的参数
2.1. 建模分析
首先通过研究嫦娥三号探测器软着陆的过程,了解其大致的飞行轨迹。根据分析满足开普勒第二定律以及机械能守恒定律,联立方程组求出近月点以及远月点的速度。由于嫦娥三号从近月点开始下落,且与着陆准备轨道在同一个平面上,最后由牛顿第二定律建立平面月球二维动力学模型,计算出近地点的纬度,最终确定近地点与远地点的位置与运行方向。
2.2. 动力学模型的建立与求解
嫦娥三号在此着陆准备轨道上不考虑燃料消耗等重量影响因素,所以嫦娥三号的机械能守恒,且满足开普勒第二定律(其着陆准备轨道如图1所示),可以得到如下方程组:
式中m是嫦娥三号的质量;
、
分别是近月点和远月点处的月球引力加速度,即
,
代入相关数据即可以解得
,
。
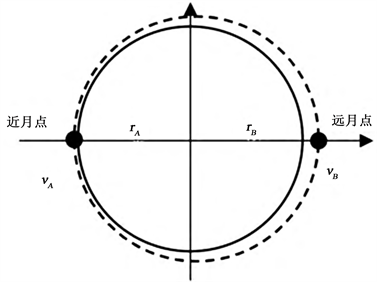
Figure 1. Landing preparation orbit diagram.
图1. 着陆准备轨道示意图
2.3. 近月点与远月点位置的确定
结合参考文献 [2] 中对主减速阶段飞行时间的求解,再根据该阶段所处的状态,可以得出所需要的时间应在415 s,其在月面投影飞行的纬度数为12.6397˚。又结合嫦娥三号落点位置(19.51˚W,44.12˚N),假设嫦娥三号软着陆轨道为过月球自转轴的平面,且从南至北着陆,那么可以求出嫦娥三号的近月点的纬度为
即嫦娥三号近月点的经纬度为(19.51˚W,31.4803˚N)。根据对称性,远月点的经纬度为(160.5˚E,31.4803˚S)。
3. 软着陆六个阶段的最优控制策略
3.1. 建模分析
对轨道着陆过程6个阶段分别进行分析和讨论,以燃料消耗最少为最优控制条件对各阶段轨道进行设计控制 [3] [4] [5] [6] 。主减速阶段、粗避障阶段及精避障阶段三个阶段对嫦娥三号是否成功着陆起着至关重要的作用,因此本文对这三个阶段进行重点分析;同时,这6个阶段的受力状态和变化情况基本一致,所以,本文先给出嫦娥三号的一般受力分析模型,之后分别讨论每个阶段的最优控制策略问题。
对嫦娥三号进行受力分析(见图2),再结合燃料消耗最小为最优控制的目标得到优化模型为:

Figure 2. Stress analysis diagram of chang’e-3 landing process
图2. 嫦娥三号着陆过程受力分析图
对于不同阶段的最优控制问题,主要就是相应的初始状态和终止状态约束条件的区别,其基本模型是类似的。
3.2. 模型的建立与求解
3.2.1 主减速阶段的模型
主减速阶段的初始状态为近月点的状态,末端状态为嫦娥三号位于预定落月点上空3 km处。根据对嫦娥三号受力分析,可以得到主减速阶段的最优控制函数为
以及边界条件为:
结合3.1中的一般模型,即得到此阶段的非线性约束模型。
本文利用浮点数编码的遗传算法进行求解,其步骤如下:
Step 1. 将7个取值范围给定的优化参量按一定的浮点数编码排列在一起成为一个个体,随机产生2000个这样的个体作为初始种群;
Step 2. 通过编写的适应函数计算每一个个体的性能指标;
Step 3. 使用轮盘赌法作为选择算子并对这N个个体进行排序;
Step 4. 选择出若干个性能指标取值较优的个体保留,并将其遗传到下一代;
Step 5. 将个体随机两两配对,按照既定的交叉概率进行交叉操作;
Step 6. 对每一个个体中的每一个参数,按照既定的变异概率进行编译操作;
Step 7. 若满足收敛条件则输出最优解,否则继续进行编码、评价、选择、交叉和变异等操作。
通过对约束条件的分析,本文采用选择交叉概率为0.6,变异概率为0.05。利用MATLAB编程可以得到如下结果(图3~图5)。
3.2.2. 快速调整阶段的控制策略
快速调整阶段的时间较短,目标是在短时间内调整嫦娥三号的姿态,使其在降至2.4 km高度前的水

Figure 6. The relationship between the rapid adjustment segment’s thrust and each variables
图6. 快速调整段推力与各变量关系图
平速度达到 0,该阶段相较主减速阶段的燃料消耗较少。利用MATLAB编程可以得到如下结果(图6,图7)。
3.2.3. 粗避障阶段的最优控制策略
粗避障阶段的起始状态为速度(0, 0),高度2400 m;终止状态为垂直速度0,高度100 m,要求水平位移40 m。为了简化,假设在粗避障阶段的运行轨迹为直线,即月球引力和主减速发动机推力的合力方
向在粗避障阶段保持不变。
根据求解可知主发动机的推力开始较小,使嫦娥三号能够逐步加速,之后推力逐步增大,以实现在高度100 m处悬停。其推力方向角是指推力与竖直向上方向的夹角,可由预定落点的方向确定。
3.2.4. 精避障阶段的模型
精避障阶段主要是在粗避障段确定的着陆区域内进行精确的障碍检测,识别并剔除危及安全的小尺度障碍,从而确保嫦娥三号的落点安全。该阶段相对于粗避障段的识别精确度和对落月区域的要求更高。精避障段的目标同样是以落地安全和准确性为主,同时兼顾燃料消耗,利用MATLAB编程可以得到如下结果(图8,图9)。

Figure 7. Rapid adjustment segment of the landing trajectory
图7. 快速调整段着陆轨迹图
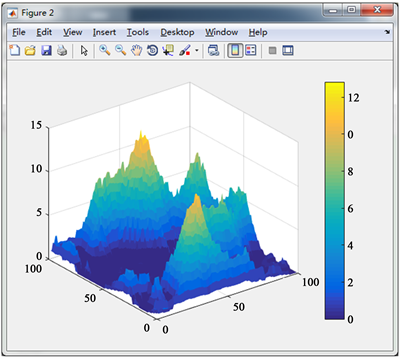
Figure 8. Color gradation of comprehensive evaluation index
图8. 综合评价指标色阶图

Figure 9. Optimal landing zone in the stage of accurate avoiding obstacles
图9. 精避障阶段的最优着陆区
3.2.5. 缓速下降阶段的控制策略
主发动机推力逐步增大,从而使得下落速度先加速后减速,最终速度变0,即悬停于,距月面4 m处。
3.2.6. 自由下降阶段的控制策略
自由下降阶段的起始状态为距月面高度4 m,主发动机推力为0,垂直自由落体运动,着落速度约为2.55 m/s。
4. 结论
本文对着陆器在不含大气的天体表面着陆提供了一种行之有效的方法,通过MATLAB程序,利用月球的物理数据和嫦娥三号的一些参数,对软着陆轨道进行优化控制。计算结果与官方公布数据相当,误差在允许范围之内,本程序可以应用于其他类似天体的软着陆情况。不仅有利于着陆器的安全,也能提高效率和节约成本。
基金项目
2015年度湖南省大学生研究性学习和创新性实验计划项目,项目编号:201510536011。