1. 引言
近年来,国内外电力系统发生过多起连锁故障导致的大停电事故,造成了巨大的经济损失和灾难性后果 [1] [2] [3] 。因此开展对连锁故障的预测研究,加强对连锁故障的仿真分析,对防御大停电事故具有重要意义。
由于电力系统本身是复杂的高阶非线性动态系统,而连锁故障的成因和发展过程又复杂多变,导致使用传统的电力系统可靠性分析方法分析连锁故障的难度很大。针对这种情况,国内外学者进行了各种研究,提出不少行之有效的新理论、新模型。从电力系统仿真的角度出发,现有的连锁故障仿真模型大致可分为基于直流潮流的稳态模型(DC-steady model,简称DC-SM)、基于交流潮流的稳态模型(AC-steady model,简称AC-SM)、基于稳定计算的暂态模型(transient model,简称TM)以及基于稳定计算和潮流计算交替的混合模型(hybrid model,简称HM)。
基于稳态模型的连锁故障仿真,考虑电网潮流特性,将连锁故障视为离散的状态转移过程,重点考虑每级故障的暂态过程消失后的潮流变化情况,忽略故障发生后暂态过程和系统稳定性问题。其中基于交流潮流的稳态模型的数学模型是一组非线性方程,潮流计算准确度较高,在连锁故障分析中得到广泛应用:文献 [4] [5] 提出了基于交流潮流稳态模型的Manchester模型模拟电力系统连锁故障,文献 [6] [7] 提出了一种基于交流潮流稳态模型的OPA模型。文献 [8] [9] [10] 提出了基于AC-SM的连锁故障事故链模型。基于直流潮流的稳态模型在基于交流潮流的稳态模型的基础上对潮流方程进行简化处理,忽略了线路电阻和并联支路,不考虑无功和电压直接的关系,数学模型是一组线性方程,与交流潮流的计算结果相比存在一定误差 [11] ,但其有效降低了模型复杂度,计算速度快,且无收敛性问题,可用于快速模拟连锁故障。
相比稳态模型,暂态模型采用微分代数方程,通过时域仿真可以有效模拟连锁故障发展过程中的系统状态、元件动作以及控制措施之间的相互影响,提供准确的系统动态信息,仿真精度高,可用于连锁故障的全过程动态仿真,但由于模型复杂度较高,计算量也远大于稳态模型。文献 [12] 考虑了动态过程中机组保护、变压器励磁保护、低频/低压减载、线路过载等因素,提出了一种基于长期动态仿真的电力系统连锁故障模型;文献 [13] 将电力系统的机电暂态过程、中期过程和长期过程进行有机地统一,提出了电力系统全过程动态仿真模型。
混合模型是对稳态模型和暂态模型的一种折中,其核心就是在稳态模型的基础上嵌入一个暂态模型,当系统发生扰动时,进入暂态模型,以模拟扰动发生后的暂态过程和系统稳定性问题,当系统到达平衡点时,暂态模型结束,返回稳态模型中更新系统状态并进行潮流计算,之后继续搜索下一级故障。文献 [14] [15] 在搜索连锁故障过程中考虑保护动作和控制措施,并交替进行潮流计算和稳定计算;文献 [16] [17] [18] 将连锁故障过程分为电失稳前开断阶段和电失稳后开断阶段,电失稳前开断阶段考虑热稳定问题引起的元件开断,并使用稳态仿真模型进行模拟,电失稳后开断阶段考虑电稳定问题引起的元件开断,并使用暂态仿真模型进行模拟。
现有的连锁故障过程研究大多是采用上述某个模型,而很少对这些模型在连锁故障预测时的一致性和差异性进行对比。文献 [19] 从预测连锁故障路径的角度对比了DC-SM和TM的一致性和差异性,并从功角稳定和电压稳定的角度定义了临界时刻。
本文在文献 [19] 的基础上,定义了关键线路,将连锁故障传播阶段划分为关键线路开断前的缓慢相继开断阶段和关键线路开断后的快速相继开断阶段;以TM为参考模型,对比了DC-SM、AC-SM与TM的仿真结果,对线路负载率、节点电压、发电机功角等因素间的关系以及模型间的一致性或差异性进行详细分析,验证了DC-SM和AC-SM在缓慢相继开断阶段预测的有效性;针对SM在连锁故障快速相继开断阶段预测方面存在的问题,对比了HM和TM在快速相继开断阶段的仿真结果,验证了HM在快速相继开断阶段预测的有效性。
2. 基于稳态模型的连锁故障搜索流程
2.1. 预测初始故障的选取
线路故障是连锁故障中最常见的初始故障。根据不同的系统规模以及计算速度要求可以采取不同的初始故障选取方式,对于较大的系统,或对计算速度要求较高的搜索过程,可以定义线路的故障概率、故障后果或者故障风险等指标,根据指标筛选出潜在故障线路,形成初始故障集;而对于较小的系统,或对计算速度无较高要求的搜索过程,可以将系统中所有线路都列入初始故障集。
2.2. 基于过负荷保护的线路开断
伴随着潮流转移的线路连锁开断过程是连锁故障发展的常见模式。当线路j的潮流Fj超越其潮流极限值Cj时,过负荷保护会在一定时间后切除线路j。由于线路过负荷的严重程度不仅与线路过负荷量成正比,还与过负荷的持续时间成正比,因此本文定义过负荷累积函数Oj(t, Δt)来表示线路j在t时刻和t + Δt时刻之间的过负荷严重程度 [20] ,有:
(1)
式中:Fj(t)为线路j在时刻t的潮流值,Δt为线路j从出现过负荷到过负荷保护动作的时间间隔。当累积值Oj经过Tj秒超过临界累积值Oj,limit时,线路j过负荷保护动作,使线路j发生开断。
2.3. 功率平衡控制
当故障发生导致系统解列时,需要采取功率平衡控制以使各孤岛中的发电量和负荷量恢复平衡。功率平衡控制包括发电机调度控制和切机切负荷控制。
首先采取发电机调度控制,其中对于发电机出力大于负荷的孤岛,将孤岛内发电机按照有功功率的比例进行减小,直到发电机达到调节下限或孤岛恢复功率平衡;对于发电机出力小于负荷的孤岛,将孤岛内发电机按照有功功率的比例进行增加,直到发电机达到调节上限或孤岛恢复功率平衡。
当发电机调度控制无法使孤岛恢复功率平衡时,采取切机切负荷控制,其中对于发电机出力大于负荷的孤岛,将孤岛内发电机按照有功功率的比例进行切除;对于发电机出力小于负荷的孤岛,将孤岛内负荷按照有功功率的比例进行切除。
根据1.1到1.3的内容,可得到连锁故障搜索流程如图1所示,该流程图适用于基于DC-SM和AC-SM的连锁故障搜索,其中DC-SM的结束条件为无线路过载,而AC-SM的结束条件为无线路过载或潮流不收敛。
3. 不同仿真模型的对比分析
在n节点系统中,交流潮流方程中支路ij的有功潮流计算公式 [11] 为:
(2)
式中:Vi和Vj分别为节点i和节点j的电压大小,Gij和Bij分别为节点i和节点j之间的互电导和互电纳,θij为节点i和节点j的电压相角差。
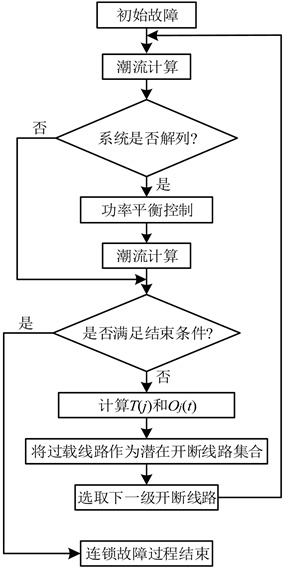
Figure 1. Flowchart of forecasting based on steady model
图1. 基于稳态模型的连锁故障搜索流程
在交流潮流方程的基础上,将节点电压近似为1,线路两端电压相角差近似为0,并忽略电阻rij,则直流潮流方程中支路ij的有功潮流计算公式为:
(3)
式中:xij为支路ij的电抗。
从直流潮流计算和交流潮流计算方程可知,在超高压网络中(阻抗比很小),DC-SM和AC-SM之间的误差主要来自DC-SM对节点电压和线路两端相角差的简化处理。
在机电暂态过程中,二阶经典发电机输出功率主要受到母线电压和功角的影响,而支路潮流可以根据发电机输出功率以及相应的节点输入功率得到。由于母线电压和功角都是时变量,因此SM和TM之间的误差主要是由于SM忽略了故障发生后的暂态过程,无法反映暂态稳定性问题,包括暂态电压、暂态功角等因素的影响。
为了分析DC-SM、AC-SM和TM在连锁故障预测中的一致性和差异性,本章根据图1的流程图,用DC-SM预测连锁故障路径并计算每级故障的发生时刻,之后分别用AC-SM和TM仿真该连锁故障路径,其中TM中每级故障的发生时刻参考DC-SM,并对比不同仿真模型下各级故障后的系统潮流分布以及潜在开断线路集合。当系统潮流分布或潜在开断线路集合差异较小时(比如潜在开断线路集合的差异小于等于两条线路),认为各模型间保持一致性,而当系统潮流分布或潜在开断线路集合出现较大差异时(比如潜在开断线路集合的差异大于两条线路),则认为各模型间趋于不同。
为了对模型间的一致性阶段和差异性阶段进行划分,本文将开断后造成各模型间趋于不同的线路称为关键线路。本文参考文献 [19] 中相关定义,从功角稳定和电压稳定的角度定义关键线路判断准则,并对判断标准进行了重新设定。则有,关键线路判断准则:1) 任意两个发电机的最大功角差大于180˚;2) 母线电压相比额定值的偏移量大于25%且持续时间超过1 s。
根据上述定义,关键线路就是满足判断准则时刚开断的线路。例如当系统线路k开断和线路k+1开断之间某个时刻满足了关键线路判断准则,则线路k是关键线路。
4. 算例
仿真计算以IEEE39节点系统为例,该系统阻抗比的平均值为0.073。仿真中临界累积值Oj,limit为线路j的潮流值超过潮流极限值50%且持续5 s时的累计值 [20] ,发电机调节的上下限分别为发电机初始值的上下10%。算例中初始故障集为系统所有线路。
4.1. 基于SM和TM的连锁故障仿真对比
选取线路8为初始故障,根据图1所示的搜索流程,可得到基于DC-SM的连锁故障演化路径,如表1所示。
以表1中的路径1为例,说明电压因素的影响。在AC-SM和TM中设置相同的线路故障和时间,得到基于DC-SM、AC-SM和TM的系统潮流分布的变化图,如图2所示(图中表格内第一列为线路编号,第二列为负载率)。需要说明的是,为了突出系统中重要线路的潮流分布,图2中只显示过载线路集合。
从图2可以看出,初始故障线路8开断后,发电机32只能通过线路12向负荷4供电,这导致线路12的有功潮流立即增加;线路12在22.64 s开断后,线路21成为发电机32、33、34、35、36向外传输功率的唯一路径,其负载率达到最大;线路21在29.09 s开断后,系统解列为2个孤岛,经过功率平衡控制后,线路3上的有功潮流因发电机30、37、38有功功率的增加而增加,并在45.85 s开断;线路3的开断导致其并行输电线路31的潮流急剧增加,并使线路31在54.43 s开断。直到此时,DC-SM、AC-SM

Table 1. Cascading failure paths based on DC-SM
表1. 基于DC-SM的连锁故障演化路径

Figure 2. Distribution of power flow in different stages of cascading failure path1
图2. 连锁故障路径1中各阶段的系统潮流分布
和TM间仍保持一致性。
图3为连锁故障路径1中节点3、节点4、节点15、节点18等对应的节点电压。从图3可以看出,当线路31开断后,部分节点的电压急剧下降,系统出现电压崩溃,此时DC-SM、AC-SM和TM已经开始趋于不同。从图2可以看出,AC-SM由于系统无功和电压的问题较为严重,潮流无法收敛;而DC-SM由于假设节点电压保持在额定电压附近,得到的系统潮流分布与TM相差很大,比如图2中DC-SM有多条线路过载,且过载最严重线路为线路7,而TM只有线路1过载。综上所述,当线路31开断后,由于电压因素的影响,DC-SM和AC-SM已经无法准确进行连锁故障路径的搜索,因此线路31是连锁故障路径1中的关键线路,DC-SM和AC-SM适用于线路31开断前的连锁故障路径预测。
同理,以表1中的路径2为例,说明功角因素的影响。各仿真模型中线路8和线路12开断后的系统潮流分布如图1所示,线路25开断后的系统潮流分布如表2所示。
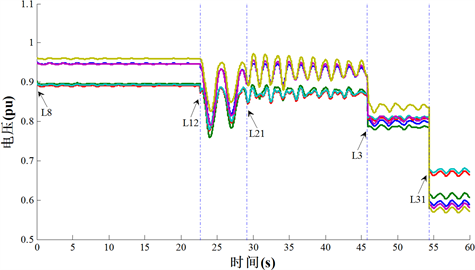
Figure 3. Bus voltage in cascading failure path 1
图3. 连锁故障路径1中系统部分节点电压
Table 2. Distribution of power flow in cascading failure path2 after line 25 is outage
表2. 连锁故障路径2中线路25开断后的系统潮流分布
图4为连锁故障路径2中发电机最大功角差,图5为连锁故障路径2中39个节点对应的节点电压。
可以看出,当线路25开断后,部分发电机开始失步,并伴随着电压失稳,系统失去稳定。如果这种情况出现在实际系统中,调度人员将会采取切机等措施来防止系统稳定性被进一步破坏。上述原因导致SM和TM间出现较大差异,从表2可以看出,DC-SM和AC-SM的潮流分布较为相似,但与TM却存在明显区别,这是因为SM忽略了故障后暂态过程的影响,当线路25开断后,系统被注入大量的暂态能量并过分汇集在线路4,引起线路4失稳 [21] ,导致系统功角失稳。综上所述,当线路25开断后,由于功角因素的影响,DC-SM和AC-SM已经无法准确进行连锁故障路径的搜索,因此线路25是连锁故障路径2中的关键线路,DC-SM和AC-SM适用于线路25开断前的连锁故障路径预测。
从上述分析可以看出,SM和TM在关键线路开断前的缓慢相继开断阶段能保持较高的一致性,而在关键线路开断后的快速相继开断阶段,系统发生功角失稳或电压失稳,SM和TM开始趋于不同,此时忽略暂态过程的SM已经无法准确进行连锁故障路径的搜索。
4.2. 基于HM和TM的连锁故障仿真对比
从上文可以看出,关键线路开断后SM和TM趋于不同,此时SM不能准确反映系统运行状态,无法继
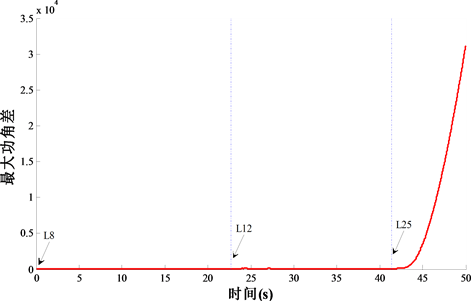
Figure 4. The maximum relative power angle in cascading failure path 2
图4. 连锁故障路径2中系统发电机最大功角差

Figure 5. Bus voltage in cascading failure path 2
图5. 连锁故障路径2中系统节点电压
续连锁故障路径的搜索。HM是对SM和TM的一种折中方法,其核心就是在SM的基础上嵌入一个TM,该TM主要作用是进行暂态稳定判断和控制,以消除系统暂态失稳,当系统到达平衡点时,TM结束,返回SM中更新系统状态并进行潮流计算,继续搜索下一级故障。HM与TM、SM在连锁故障搜索中的关系如图6所示。
为了分析HM在快速相继开断阶段中进行连锁故障搜索的有效性,本章先用HM仿真连锁故障路径。HM仿真采用电力系统综合稳定程序(PASAP),其中HM中的SM部分使用PSASP中的潮流计算模块,HM中的TM部分使用PASAP中的暂态稳定计算模块。每一次故障发生后,首先运行暂态稳定计算模块,在暂态稳定计算模块中根据搜索路径设定开断线路,若系统暂态稳定,则直接返回潮流计算模块,在潮流计算模块中根据搜索路径设定开断线路,再进行潮流计算;若系统暂态失稳,则需要采取控制方案(切机切负荷等)使系统恢复稳定,然后返回潮流计算模块,在潮流计算模块中更新发电机负荷状态,根据搜索路径设定开断线路,再计算潮流。之后,用TM仿真与HM相同的连锁故障路径,并对比不同仿真模型下各级故障后的系统潮流分布以及潜在开断线路集合。需要说明的是,TM仿真也需要在系统暂态失稳时加入控制方案使系统恢复稳定,以便与HM的仿真结果在同样条件下对比。
以表1中的连锁故障路径2为例,采用HM仿真连锁故障,可得到基于HM的系统潮流分布的变化图,如图7所示。
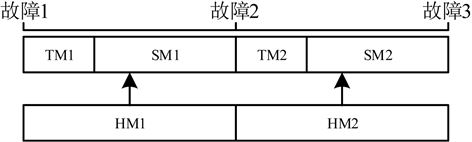
Figure 6. The relationship between HM and TM, SM
图6. HM与TM、SM的关系
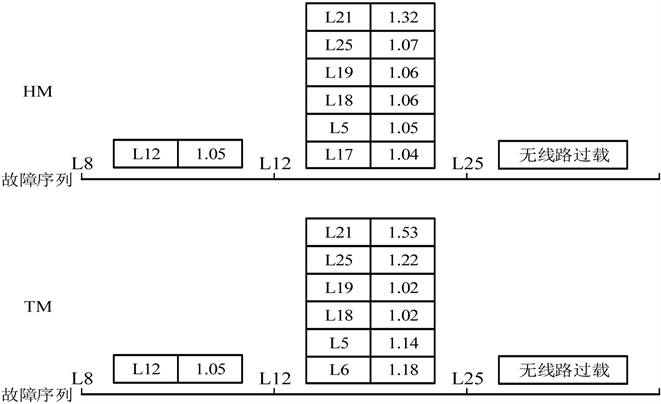
Figure 7. Distribution of power flow in different stages of cascading failure path based on HM and TM
图7. 基于HM和TM的连锁故障路径在各阶段的潮流分布
从图7可以看出,在关键线路25开断前,系统保持暂态稳定,因此在HM的TM中只进行暂态稳定判断,然后通过HM的SM模块计算潮流并搜索下一级故障,此时的HM相当于SM,而由于关键线路开断前SM和TM能够保持一致,因此HM也能够与TM保持一致;当关键线路25开断后,在HM的TM模块中判断系统功角失稳后,采取暂态稳定控制使系统恢复稳定,之后返回HM的SM模块中更新系统状态并计算潮流,从而得到新稳定运行点下的系统潮流分布。从图7可见,HM和TM在关键线路开断前后都能保持较高的一致性,解决了SM在关键线路开断后与TM存在较大差异的问题。HM可以解决SM忽略暂态过程,无法反映系统暂态稳定性的问题,当系统出现暂态失稳时,HM可以先在TM中采取稳定控制使系统恢复稳定,再在新的稳定运行点下进行潮流计算,从而消除系统失稳带来的误差。
5. 结论
本文将连锁故障传播阶段划分为关键线路开断前的缓慢相继开断阶段和关键线路开断后的快速相继开断阶段,对AC-SM、DC-SM与TM的仿真结果进行对比,详细分析模型的一致性和差异性。算例分析表明,在关键线路开断前,AC-SM、DC-SM与TM间具有较高的一致性,但在关键线路开断后,AC-SM、DC-SM与TM间表现出明显的差异性,此时DC-SM和AC-SM已经不能准确反映系统运行状态,无法继续连锁故障路径的搜索。因此AC-SM和DC-SM模型更适合关键线路开断前,即系统发生暂态失稳前的连锁故障仿真和路径搜索。
此外,针对SM模型存在的问题,本章将HM模型用于快速相继开断阶段的连锁故障仿真和路径搜索。通过算例分析可以看出,HM可以解决SM忽略暂态过程,无法反映系统暂态稳定性的问题,消除系统暂态失稳带来的误差,从而与TM的仿真结果保持较高的一致性。因此HM既适用于关键线路开断前的缓慢相继开断阶段,也适用于关键线路开断后的快速相继开断阶段的连锁故障仿真和路径搜索。