1. 引言
电涡流传感器在长期使用过程中,可能会因为老化或者受客观环境的影响,指示值会出现很大的误差甚至错误,所以需要根据电涡流传感器的性能定期的对其进行动态或者静态校准,及时发现并处理电涡流传感器存在的问题,校准时,感应盘使用被校准传感器实际工况中所感应的金属导体材料制成,这样来保证电涡流传感器测量结果的准确性,校准周期一般不超过一年 [1] 。
目前国内对电涡流传感器的动态校准分圆盘式动校仪和标准振动台两种形式。前者如上海瑞视仪表电子有限公司设计了一种转动斜盘式的电涡流传感器动态校准装置 [2] ,该装置通过电机带动斜感应盘周期性的转动,改变电涡流传感器与感应盘之间的距离来模拟振动,装置结构简单但校准频率范围具有局限性,同时感应盘与被校准传感器之间存在夹角,会引入校准误差。后者如浙江大学对于标准振动台在超低频、低频、中频和高频的振动标准装置的研究较为深入 [3] [4] [5] 。标准振动台对电涡流传感器的动态校准精度高、频率范围广。磁路和感应盘设计的合理性是电涡流传感器动态校准标准振动台设计的关键。
2. 电涡流传感器动态校准装置结构
电涡流传感器动态校准装置结构主要为电磁振动台,电磁振动台由不动部分和可动部分组成。不动部分包括永磁体和内外磁轭,目的是在导磁体和前端盖之间产生均匀的气隙磁场;可动部分——工作台面、动圈架、动圈和支撑弹簧等组成,其示意图如图1所示。电磁振动台的工作原理是运动的电荷在磁场中受到洛伦兹力的作用,处于磁场中的通电导体会受到电磁力
的作用。当在动圈线圈通以标准的正弦电流
时,在导体的有效长度L以及导体所处磁场的感应强度B一定的情况下,工作台面在电磁力
,呈标准的正弦规律变化,进而驱动工作台做标准的正弦振动 [6] 。
3. 静磁场分析
为了使得振动台的输出加速度达到设计要求,必须在磁场气隙产生足够的磁感应强度。下面运用Maxwell 2D软件对动圈工作的气隙磁场强度进行仿真计算 [7] [8] 。
1) 模型建立
利用Maxwell 2D对永磁体在导磁体和前端盖之间产生均匀的气隙磁场进行仿真分析,其模型包括永磁体、外磁轭、内磁轭和前后端盖的二维有限元模型。建立的有限元模型如图2所示。
2) 材料特性
有限元模型包含3种不同的介质,即空气、AlNiCo永磁体和纯铁,在Ansoft软件中完成各材料的电导率、相对磁导率等属性进行定义。

Figure 1. Schematic diagram of electromagnetic vibration table
图1. 电磁振动台结构示意图

Figure 2. Electromagnetic simulation finite element model
图2. 电磁仿真有限元模型
3) 单元特性
为了提高仿真计算的精度,本文选择手动剖分中基于长度的剖分方式。选择网格长度时,将仿真模型分为两组,永磁体单独成组,选择网格长度为1 mm,磁场回路中起到此作用的零件分为一组选择网格长度为2 mm,电磁仿真模型网格剖分结果如图3所示。
4) 磁场仿真
通过Maxwell 2D电磁场分析计算动圈工作气隙磁场的强度,通过上述模型的建立并运用Ansoft Maxwell求解,求解的气隙磁场强度云图如图4所示。将工作气隙的磁感应强度沿动圈工作路径映射,得到动圈工作路径上的磁场强度如图5所示。从图中可以看出动圈所处的磁场强度约为0.58 T。
该校准装置校准的电涡流传感器的最大加速度为50 m/s2,满足使用要求的动圈气隙磁场要大于0.4 T。说明该设计符合设计要求。

Figure 3. Electromagnetic simulation model mesh subdivision
图3. 电磁仿真模型网格剖分结果
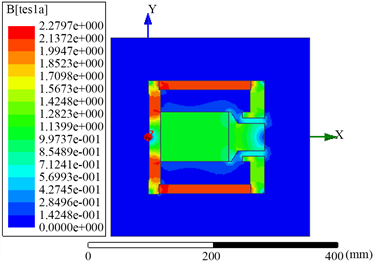
Figure 4. Imagery of electromagnetic simulation results
图4. 电磁仿真结果云图
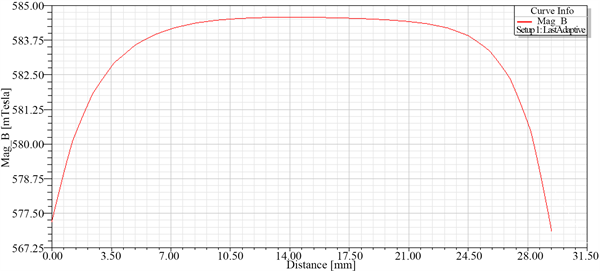
Figure 5. Intensity of the moving coil working air-gap magnetic field
图5. 动圈工作气隙磁场强度
4. 电涡流径向分布规律的研究
在进行感应盘大小的设计时,需要保证感应盘能够满足指标要求的各种尺寸的电涡流传感器的校准。感应盘的大小需要保证被校准电涡流传感器校准时产生的电涡流处在感应盘尺寸范围内。因此需要对电涡流传感器在感应盘上产生的涡流场的径向分布进行分析。
本文利用Maxwell 2D进行涡流场仿真分析,直观的体现电涡流密度的径向分布规律。涡流场仿真分析的对象为电涡流传感器的探头线圈和感应盘。电涡流传感器涡流场仿真模型的几何尺寸如表1所示。
在柱坐标系下建立电涡流传感器探头线圈和感应盘的有限元模型,传感器和感应盘的模型关于Z轴对称,鉴于此仅建立1/2的二维模型,涡流场有限元模型如图6所示,完成模型的建立以后通过Eddy Current求解器进行求解 [9] 。
在涡流场仿真分析中,仿真模型包含电涡流传感器线圈、感应盘和空气3种介质,为了使仿真结果更加接近实际情况,仿真分析是在一个空气的求解域中进行,电涡流传感器线圈的材料是铜,感应盘的材料为42CrMo。在Maxwell 2D中运用Eddy Current求解器进行求解。求解结果如图7所示,在进行涡流场仿真时需要特别注意的是要设置集肤效应 [10] 。通过对涡流场的有限元仿真可得到电涡流传感器的磁力线分布,从测试结果可以看出,在线圈直径附近的磁力线密度最为集中,这与电涡流传感器的实际情况及理论分析一致。
将感应盘中的涡流密度在表面路径映射,可以得到电涡流的密度沿感应盘表面径向的分布曲线,如图8所示。从图中可以看出电涡流密度随着径向距离的增大呈现先快速增大,增大到最大值后逐渐变小,在距离感应盘圆心较远处电涡流密度趋于零。电涡流密度最大点在其线圈等效直径的位置,与理论分析中电涡流密度沿径向坐标的变化规律一致。同时电涡流传感器在感应盘上产生的电涡流均分布在感应盘的直径范围内,满足使用要求。

Table 1. Simulation model geometric parameters
表1. 仿真模型几何参数

Figure 6. Induction plate eddy current field analysis model
图6. 感应盘涡流场分析模型

Figure 7. Simulation diagram of magnetic force line distribution of eddy current sensor
图7. 电涡流传感器的磁力线分布仿真图
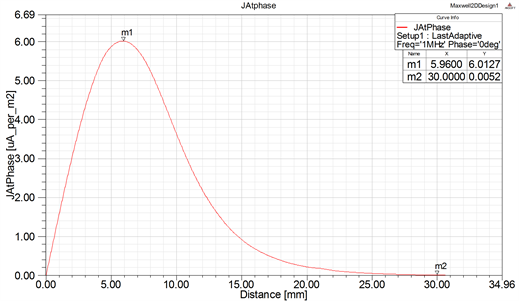
Figure 8. Radial distribution of eddy current density in induction plate
图8. 感应盘中电涡流密度径向分布图
5. 结论
运用Ansoft Maxwell对电涡流传感器动态校准装置的气隙磁场以及电涡流传感器在感应盘上感应的电涡流分布的求解计算,验证了其动圈工作气隙磁场强度满足所要校准传感器的最大加速度使用要求,同时电涡流传感器在感应盘上感应的电涡流分布在感应盘直径范围内,验证了感应盘尺寸设计的合理性。